
一种改进自适应机动目标跟踪算法∗
2014-03-14 01:04金亮亮刘亚云
雷达科学与技术 2014年1期
金亮亮,刘亚云
(中航雷达与电子设备研究院,江苏无锡214063)
0 引言
机动目标的跟踪是目标跟踪的一个重点及难点问题。其中目标的运动模型是一个难点和热点问题,国内外学者提出了一些描述机动目标运动变化的改进模型,跟踪效果较好的典型算法是周宏仁[1]提出的基于“当前”统计模型的自适应滤波算法。该模型把机动目标加速度的一步预测看作是“当前”统计加速度,并将它作为修正瑞利分布的均值,以实现目标的均值自适应滤波,同时又利用机动加速度方差与状态噪声方差的关系实现目标的方差自适应滤波。但该算法在跟踪匀速运动和加速度较小的目标时,跟踪误差比较大,收敛时间比较长,在跟踪具有加加速度的机动目标时,速度和加速度的估计延时较大,跟踪精度也比较大,因此不能实时地反映目标的机动情况。
周东华等人在1991年提出一种强跟踪滤波器(STF)。通过KF或EKF计算误差协方差时引入一个时变次优渐消因子λ(k+1),STF在线调整相应的增益矩阵,迫使残差序列相互正交。最后证明STF对于模型失配具有很强的鲁棒性,可以用于跟踪机动目标。但是,STF的跟踪精度也存在非机动部分并不理想的缺点。考虑上述问题,提出了一种基于“当前”统计模型的自适应跟踪算法,即通过对强跟踪算法的修正以及用截断正态概率密度模型替代修正瑞利分布来表征目标机动加速度特性,从而来改进跟踪性能。通过仿真和实际工程的应用,证明上述跟踪算法能够有效地提高目标的跟踪能力。
1 “当前”统计模型自适应算法及强跟踪算法
“当前”统计模型一维情况下离散时间系统的状态方程为[2-3]

式中,

W(k)是离散时间白噪声序列,且方差为

其中,

为加速度方差,α为机动(加速度)时间常数的倒数。
利用瑞利分布随均值而变化,方差由均值决定的特点,令加速度均值等于当前时刻的加速度预测值,实现均值和方差自适应滤波。加速度方差可按下式计算:a xmax,a-xmax为目标最大正加速度和负加速度。量测方程为


基于“当前”统计模型的强跟踪算法采用的是KF或EKF作为跟踪滤波器对机动目标进行跟踪,在算法中引入了渐消因子,能根据残差自适应的调节增益。算法流程如下[4]:

0<ρ≤1是遗忘因子,一般取ρ=0.95,β是弱化因子,可根据经验而定。
2 改进算法
“当前”统计模型跟踪匀速运动和加速度较小的目标时,跟踪误差比较大,收敛时间比较长,在跟踪具有加加速度的机动目标时,速度和加速度的估计延时较大,跟踪精度也比较大,而STF在跟踪目标机动时性能良好,在非机动部分的跟踪精度不理想。针对上述两问题,本文从两个方面着手改进跟踪算法。
(1)在STF算法中,计算预测协方差P(k+1/k)时,协方差Q(k)的影响被忽视。因此,改进算法将在P(k+1/k)的递推过程中,增加协方差Q(k)的权重。定义P(k+1/k)如下:

为满足正交原理,STF算法相应公式变换为

为使状态估计更光滑,采用平方根函数特性,则

在STF算法中,滤波协方差计算,只有在最佳条件下才成立,且是两个正定矩阵之差,不便于保持正定和对称性质。将滤波估值协方差改为

(2)结合“当前”统计模型,采用目标加速度的截断正态概率密度模型。该模型认为目标的机动加速度为截断正态分布[6],其概率密度分布和方差分别为
式中,erf(3)≈0.49865。
截断正态分布的加速度方差和“当前”模型的加速度方差基本一致,对匀速目标进行跟踪时,噪声变大,导致对弱机动和非机动目标跟踪精度变差。需对加速度方差进行修正。修正方法如下:

在目标非机动下,由于人为操作和自然环境影响,目标很小的加速度。取

3 仿真实例
利用Monte-Carlo仿真理论,对改进前后自适应算法在三维[7]直角坐标下进行目标跟踪比较。扫描周期为0.5 s,加速度上限分别为50 m/s2,仿真200s。X轴方向初始位置16 km,速度300 m/s,目标前75 s作匀加加速运动,75~150 s作匀加速运动,加速度为30 m/s2,150~200 s作匀速运动,目标X轴方向位置、速度、加速度均方根差仿真结果如图1~4所示。

图1 位置均方根误差
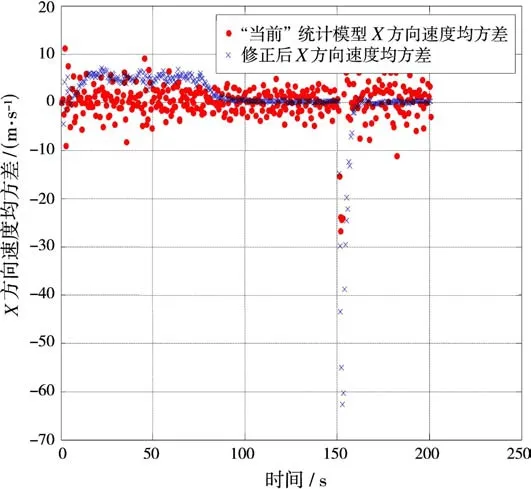
图2 速度均方根误差

图3 加速度均方根误差

图4 目标真实加速度
4 结束语
从图1~4中可以看出,在目标匀加加速运动到加速运动再到运算运动,改进算法在目标位置、速度和加速度的均方差收敛性明显优于未改进算法,说明通过修正“当前”统计模型下的强跟踪算法和机动目标加速度的概率密度分布能够更加有效地对机动目标实施跟踪。但在非机动目标和机动目标突变和匀加加速运动过程中,由于采样时间过长(0.5 s),目标信息有一个突变过程,改进跟踪算法对目标的突变信息有一个缓慢的调节过程,需大约50步左右的调节时间。因此,在这个过程中,跟踪性能有所下降。但可以提高采样时间来弥补在突变过程中的跟踪性能下降。目前该算法已在某型雷达上得到应用。
[1]周宏仁,敬忠良,王培德.机动目标跟踪[M].北京:国防工业出版社,1991.
[2]王树亮,阮怀林.基于改进“当前”统计模型的目标跟踪算法[J].雷达科学与技术,2010,8(4):347-351.WANG Shu-liang,RUAN Huai-lin.A Tracking Algorithm Based on Improved Current Statistical Model[J].Radar Science and Technology,2010,8(4):347-351.(in Chinese)
[3]张媚,梁彦,王增福,等.基于当前统计模型的VDA机动目标跟踪算法[J].火力与指挥控制,2011,36(2):58-61.
[4]Fan Xiao-jun,Liu Feng,Qin Yong,et al.Current Statistic Model and Adaptive Tracking Algorithm Based on Strong Tracking Filter[J].Acta Electronica Sinica,2006,34(6):981-984.
[5]李涛,王宝树,乔向东.基于截断正态概率模型的改进目标跟踪算法[J].系统工程与电子技术,2003,25(10):1289-1291.
[6]韩宏亮,周希辰,袁桂生.一种三维机动目标跟踪的改进IMM算法[J].雷达与对抗,2010,30(4):29-33.
猜你喜欢
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
当代陕西(2019年12期)2019-07-12
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
计算机应用与软件(2019年2期)2019-04-01
汉语世界(The World of Chinese)(2019年1期)2019-03-18
经济研究导刊(2018年19期)2018-07-24
雷达学报(2017年3期)2018-01-19
初中生世界·九年级(2017年10期)2017-11-08
北京航空航天大学学报(2016年9期)2016-11-16
