汽车前向主动报警/避撞策略
2014-03-14 01:43裴晓飞齐志权王保锋刘昭度
吉林大学学报(工学版) 2014年3期
裴晓飞,齐志权,王保锋,刘昭度
从20世纪90年代初,在美国高速公路交通安全署(National highway traffic safety ad ministration,NHTSA)的推动下,汽车主动报警避撞系统(Collision warning/Collision avoidance,CW/CA)开始得到迅速发展,许多避撞模型被提出,如CA MP模 型、MAZDA 模 型、HONDA 模 型、Ber keley模 型 和 NHTSA 模 型 等[1-3]。其 中,绝大多数属于安全距离模型,即通过测量车间相对运动关系,当实际车距小于所计算的报警安全距离或制动安全距离时,避撞系统的声光报警和制动干预则相继介入。但就驾驶员对于CW/CA系统的接受程度而言,现有的避撞算法仍有较大的改进空间[4]:一方面应该更为准确地表征危险工况;另一方面,针对不同特点的驾驶员,避撞方式应该更加灵活。
本文首先对驾驶员避撞行为中的两个关键参数:反应时间和制动减速度进行了统计分析。然后提出了一种新的基于时间的工况表征指标,充分利用已知的车间相对运动信息来有效地评估当前的碰撞危险程度。基于避撞时间余量分别设计了分级报警和主动制动的避撞策略,并对声光报警以及主动制动的时机进行标定,通过仿真试验对比验证了该报警算法的有效性。
1 驾驶员避撞行为特性分析
在驾驶员避撞特性中,驾驶员反应时间和制动减速度是最为重要的两个参数。其中,驾驶员反应时间包括大脑的信息加工时间、释放油门踏板时间和踩下制动踏板时间3个部分;而制动减速度表征了驾驶员对于当前工况的危险程度所采取的制动强度。避撞反应时间是同制动减速度的大小相对应的。如果施加的制动强度越大,则留给驾驶员反应的安全时间余量越大。
文献[5]在驾驶模拟器上,研究了不采取声光报警情况下,100名不同年龄的驾驶员的避撞反应时间,统计结果如表1所示。由表1可以看出:驾驶员反应时间为0.81~2.44 s,平均驾驶员的自然反应时间为1.33 s,方差为0.27,并且年长者的相对反应时间更长。

表1 不同年龄段驾驶员的反应时间Table 1 Driver reaction ti me for different ages
文献[6]归纳了驾驶员对于不同类型报警信号的反应时间,统计结果如表2所示。在声光报警作用下,驾驶员反应时间的均值仅为0.9 s,相比于仅用视觉报警,反应时间缩短了0.23 s。由此可见,在一定的外界条件刺激下,避撞反应时间会明显缩短,并且听觉报警信号的效果更为明显。

表2 不同报警信号下的驾驶员反应时间Table 2 Driver reaction ti me under different warning signals
而在制动减速度方面,NHTSA通过83名驾驶员的避撞试验数据,统计出驾驶员制动过程中的平均减速度和最大减速度[7],如表3所示。由表3可以看出:绝大多数驾驶员的平均制动减速度不会超过0.55 g(g=9.8 m/s-2),而避撞过程中的最大减速度几乎是平均减速度的两倍。

表3 驾驶员的制动减速度统计分布Table 3 Driver braking deceleration
文献[7]进一步估计了在一定制动强度下所需的避撞时间,如表4所示。由此可见,施加的制动强度越大,期望的制动初始时刻越迟。如果驾驶员在碰撞发生前1.8 s持续施加0.5g的制动减速度,即能避免绝大多数的碰撞事故;而在0.85g的制动减速度下,该时间仅需要1.2 s。
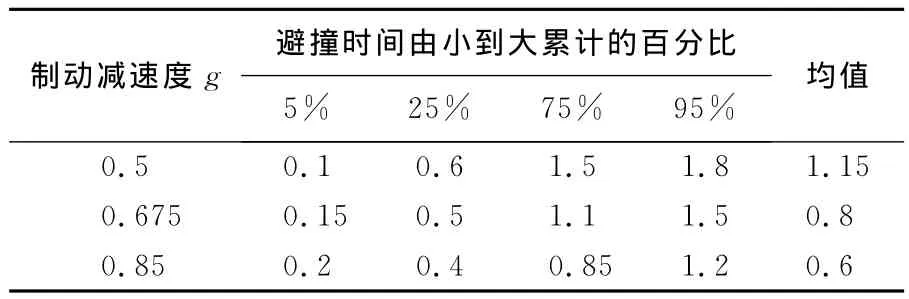
表4 不同制动强度下所需的避撞时间Table 4 Desired ti me for different br aking deceler ation
2 危险判定指标
对于现有的CW/CA 系统,大多采用Ber keley模型中的危险系数ε来评估当前工况的危险程度[2]:

式中:Rw、Rbr分别为报警安全距离及制动安全距离。
当ε>1时,表明车辆处于安全状态;当0<ε<1时,系统启动分级报警,并且随着ε值变小,报警级别升高;当ε<0时,系统主动制动会立即接管车辆控制。
综上可知,危险系数ε本质上只是一种基于距离的线性指标,并不一定能够准确地对碰撞威胁作出实时评估。如果采用一种基于时间的危险判定指标,能直观地反映出当前工况的安全时间余量,更加接近于驾驶员自然的感知和判断习惯。同时,该指标还应充分利用所获得的前车及自车状态信息,例如主车车速vh、主车加速度ah、车距R、相对车速vr、相对加速度ar等,对实时运动工况进行定量表征。因此,新的危险判定指标Tbuffer为:

式中:相对加速度ar可由相对车速vr的历史信息差分获得,并对其进行必要的卡尔曼滤波处理。
对Tbuffer的估算分为两种情况,取决于前车是否能在碰撞发生前停止。Tbuffer满足以下运动关系方程:

式中:tps为前车由当前工况至完全静止所需的时间:

为了简化Tbuffer的计算过程,首先假设碰撞发生时前车处于运动状态(即tps>Tbuffer)时有:

然后将得到的Tbuffer结果代入条件中进行检验,如果符合tps>Tbuffer,则计算结束;否则此时Tbuffer按照第1种情况计算得:

如果前方为静止目标,即vp=ap=0时,那么式(6)可以简化为:

于是Tbuffer可以由式(7)变形得到:

如果前车与主车均保持匀速行驶,即ah=ap=0时,那么式(8)最终变形为:式中:TTC为避撞时间。

由此可见,Tbuffer实际上是在TTC判定指标的基础上,进一步考虑两车加速度情况的一种延伸。特别地当vr>0,即前车车速大于主车车速时,不存在追尾的威胁,因此避撞系统只考虑Tbuffer为正值的情况。
3 主动制动避撞策略设计
新的危险判定指标Tbuffer能定量地反映出当前工况留给驾驶员或控制系统进行避撞操作的时间,因此可以直接作为主动避撞系统的有效判据,如图1所示。面对前方车道内突然出现的障碍目标,一旦驾驶员未能及时采取正确的避撞操作,避撞系统能立即代替驾驶员接管车辆控制权。当Tbuffer小于制动触发时刻tb1时,制动压力将被自动施加。

图1 分级报警逻辑Fig.1 Graded warning logic
由于主动制动相比声光报警会给驾驶员带来更强烈的主观感受,甚至不适。因此,应该避免主动制动的频繁介入,而一旦介入,则希望车辆以一个很大的匀减速度进行制动,直至完全停止[8]。另一方面,由于不依靠驾驶员的制动操作,制动时机的确定主要取决于车辆制动系统自身的时滞和增益特性[9],不同驾驶员在反应时间和制动减速度上的差异对其影响较小。
根据表3将系统期望的避撞减速度设定为-6 m/s2,保证主动制动前驾驶员有充分的时间完成避撞选择(制动/转向)并采取相应的动作。同时,对不同制动压力下产生的车辆减速度进行了道路试验,标定结果表明,如果施加7 MPa的恒定压力,即可满足平均制动减速度的要求。在此基础上,由表4的统计数据选取合适的制动触发时间tb1。经过权衡,将tb1值设为1.8 s。表4中的结果表明,通过所设计的主动制动避撞策略可以避免超过95%的碰撞事故发生。
4 分级报警避撞策略设计
避撞报警策略的关键是报警时机的选择。如果没有及时发出报警信号,或者报警过于频繁,不仅无法有效地帮助驾驶员避免潜在的碰撞事故,反而会分散驾驶员注意力,成为其精神负担。为了应对不同程度的碰撞威胁,同时尽可能地适应大多数驾驶员的避撞特性,分级报警策略主要体现在危险程度分级和驾驶风格分级两个方面。其中,驾驶风格可分为激进、适中和保守3个等级供驾驶员选择。
由于Tbuffer是一种基于时间的表征量,因此比距离模型更适合驾驶员直接的感知判断习惯,同时有利于结合驾驶员反应时间对报警门限进行调整。声光报警触发时刻tb2、视觉报警触发时刻tb3的具体标定过程如下:
(1)基于表1中的统计数据,确定没有报警信号辅助下的3种避撞风格的驾驶员反应时间。由于声光报警能明显缩短反应时间,因此设定的报警时间应该小于该值。同时,考虑到表1中的结果是由驾驶模拟器得到,而在真实道路上,驾驶员的自然反应时间应略大于该值。
(2)根据表2中的统计数据,考虑到不同驾驶员对于报警信号的敏感程度,确定三种避撞风格的驾驶员在视觉报警和声光报警下的反应时间。对于驾驶风格保守的驾驶员,希望能更早地接收到报警信号,从而获得足够的调整时间;而驾驶风格激进的驾驶员,则希望报警功能不要提前介入,以免干扰到正常的人为操作。因此,激进等级的警告只适用于少部分驾驶员(<50%),而保守的报警信号应该满足超过90%驾驶员的避撞需求。
(3)报警时间除了与驾驶员的反应时间有关外,还要参考车辆制动过程中所需的时间。根据上节中主动制动触发时间tb1的标定值,最终的报警触发时刻=反应时间+1.8 s,具体的标定结果如表5所示。
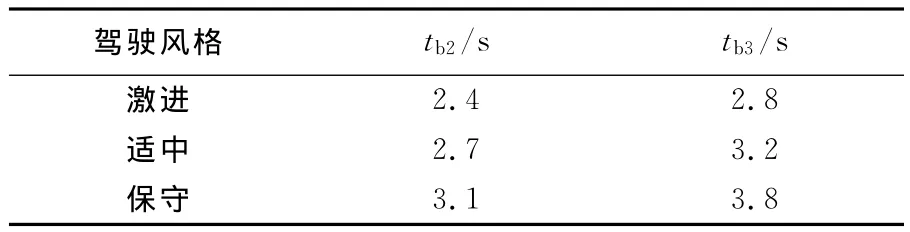
表5 报警时间的标定Table 5 War ning ti ming calibration
5 仿真结果及比较
由于实车避撞试验的危险性,同时大样本统计算法的误报率需要耗费大量的人力物力,因此本文采用距离-相对速度关系图,通过仿真初步验证避撞模型的可行性。考虑在3种典型工况下,将所提出的分级报警及制动避撞算法与4种常用避撞安全距离模型(包括 MAZDA模型、HONDA模型、Ber keley模型和NHTSA模型)进行对比研究,以便表现各个模型的性能优劣。表6给出了各模型的具体表达式。在仿真试验中,假设主车初始加速度ah=0,两车的最大加速度均为-6 m/s2。初始工况如表7所示。避撞模型的参数意义及取值如表8所示。

表6 避撞模型表达式Table 6 Collision war ning/avoidance model for mulas

表7 仿真试验的初始工况Table 7 Initial situation of si mulation test

表8 避撞模型参数Table 8 CW/CA model parameters
5.1 静止障碍物(工况1)
图2中比较了4种制动避撞算法。其中,Mazda模型显得过于保守,特别当相对车速较大时,容易很早进入主动制动,影响驾驶员正常操作;相反,Honda模型的主动制动时机过迟,当相对车速较小时,可能无法实现有效避撞。而本文提出的制动避撞模型与Ber keley模型较为相似,由图可见,实际上两者都转换为TTC指标,只是在不同车速下的TTC门限有所不同。
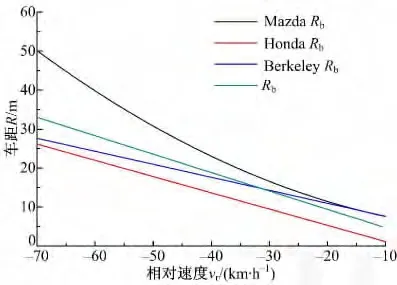
图2 制动算法比较(工况1)Fig.2 Comparison of CA algorith ms(situation 1)
图3 比较了几种报警避撞算法,其中的分级报警算法基本涵盖了其余3种算法的有效作用区域。可以根据不同驾驶风格调整相应的报警门限。例如对于保守的驾驶员,声光报警时机自动提前,有助于提高对避撞系统的适应度。

图3 报警算法比较(工况1)Fig.3 Comparison of CW algorith ms(situation 1)
5.2 前车慢速行驶(工况2)
如图4所示,由Mazda模型计算出的制动距离明显偏大;其余3种算法得到的制动距离则较为接近,这也体现了制动避撞门限的权衡结果。一方面,主动制动应该能避免95%的碰撞发生;另一方面,不应过早干预驾驶员的自主避撞行为。
在图5的报警算法比较中,当相对车速较低时,Ber keley模型明显失效;而NHTSA模型和Honda模型则被包含在分级报警算法组成的有效区域内。注意到NHTSA报警模型是建立在危险时刻汽车采取主动制动的前提下的,因此图中曲线呈凹状,相对车速越大时,算得的报警安全距离越大。但实际工况中,当相对车速较大时,驾驶员一般采取转向避撞更为有效,并不需要报警信号过早地介入。而分级报警算法并没有基于以上假设,因此所确定的报警时机更加符合驾驶员避撞特性。
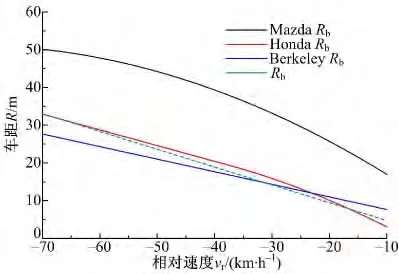
图4 制动算法比较(工况2)Fig.4 Comparison of CA algorithms(situation 2)

图5 报警算法比较(工况2)Fig.5 Comparison of CW algorithms(situation 2)
5.3 前车紧急减速(工况3)
如图6所示,除了本文提出的制动避撞算法外,其他算法在图中均表现为直线。究其原因是,其他算法均以前车加速度ap=0作为前提条件,即使前车开始紧急减速,安全车距仍然没有变化。而本文算法则考虑到前车加速度变化的情况,应用到更多的已知运动信息,因此对前车紧急制动工况更为敏感,对危险的判定也更为准确。
图7所示的报警算法中,Ber keley模型显得过于保守,而Honda模型则过于激进。由于NHTSA算法也会考虑当前ap的大小,因此安全距离随前车加速度的变化趋势同分级报警算法较为一致,同时两者的报警区间也部分重合。
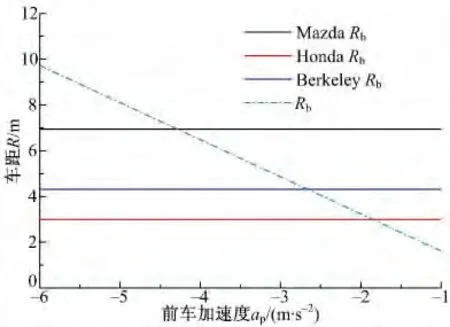
图6 制动算法比较(工况3)Fig.6 Comparison of CA algorithms(situation 3)

图7 报警算法比较(工况3)Fig.7 Comparison of CW algorithms(situation 3)
6 结束语
提出了一种基于时间的危险判定指标——避撞时间余量Tbuffer,通过充分利用车间运动信息,能够直观、准确地评估当前工况的危险程度。设计了一种基于Tbuffer的分级报警和主动制动避撞策略,并且标定了声光报警及主动制动的介入时机。仿真对比试验结果表明:由于主动制动仅与车辆自身特性相关,因此能最大程度地保证安全避撞;而分级报警的灵活性提高了不同驾驶员对于系统的接受度。
[1]Kiefer R,LeBlanc D,Pal mer M,et al.Development and validation of f unctional definitions and evaluation procedures for collision war ning/avoidance system[DB/OL].[2012-09-25].htt p://ntl.bts.gov/lib/jpodocs/repts_te/87l01!.pdf.
[2]Seller P,Song B,Hedrick J K.Develop ment of a collision avoidance system[J].Automotive Engineering,106(9):24-28.
[3]Yang H,Peng H.Develop ment and evaluation of collision war ning/collision avoidance algorith m using an errable driver model[J].Vehicle System Dynamics,2010,48(10):525-535.
[4]Lee K,Peng H.Evaluation of auto motive for war d collision warning and collision avoidance algorith ms[J].Vehicle System Dynamics,2005,43(10):735-751.
[5]Broen N L,Chiang D P.Braking response ti mes for 100 drivers in the avoidance of an unexpected obstacle as measured in a driving si mulator[C]∥Proceedings of the Hu man Factors and Er gono mics Society 4th Annual Meeting,1996,40(18):900-904.
[6]Zhang Yi-zhen.Engineering design synthesis of sensor and control systems for intelligent vehicles[D].Pasadena:Califor nia Institute of Technology,2006.
[7]Mc Laughlin B,Dingus A,Hankey M,et al.Automotive collision avoidance system field operational test[DB/OL].[2012-09-29].http://citeseer x.ist.psu.edu/viewdoc/download?doi=10.1.1.133.4507&rep=rep1&type=pdf.
[8]裴晓飞,刘昭度,马国成.汽车主动避撞系统的安全距离模型和目标检测算法[J].汽车安全与节能学报,2012,3(1):26-33.Pei Xiao-fei,Liu Zhao-du,Ma Guo-cheng.Safe distance model and obstacle detection algorith ms for collision warning and collision avoidance system[J].Jour nal of Auto motive Safety and Energy,2012,3(1):26-33.
[9]王建强,王海鹏,张磊.基于电控液压制动装置的车辆主动报警/避撞系统[J].吉林大学学报:工学版,2012,42(4):816-822.Wang Jian-qiang,Wang Hai-peng,Zhang Lei.Vehicle collision war ning and avoidance system based on electr onic hydraulic brake device[J].Jour nal of Jilin University(Engineering and Technology Edition),2012,42(4):816-822.
猜你喜欢
消费电子(2022年7期)2022-10-31
中国交通信息化(2022年3期)2022-06-01
科学与财富(2021年33期)2021-05-10
通信电源技术(2020年11期)2020-09-07
中国医疗设备(2020年2期)2020-03-01
现代信息科技(2018年3期)2018-09-10
汽车零部件(2018年5期)2018-06-13
电子技术与软件工程(2016年23期)2017-03-06
发明与创新·大科技(2016年5期)2016-05-17
中国医疗设备(2015年11期)2015-01-26