压缩感知理论下扩展迭代重加权最小二乘算法的性能分析*
2014-03-27 04:35陈小玲赵慧民魏文国
中山大学学报(自然科学版)(中英文) 2014年2期
陈小玲,赵慧民,魏文国
(广东技术师范学院电子与信息学院,广东 广州 510665)
基于几何影射学原理,经典的压缩感知理论可以表示为:
mincard(x)s.t.A(X)=b
(1)
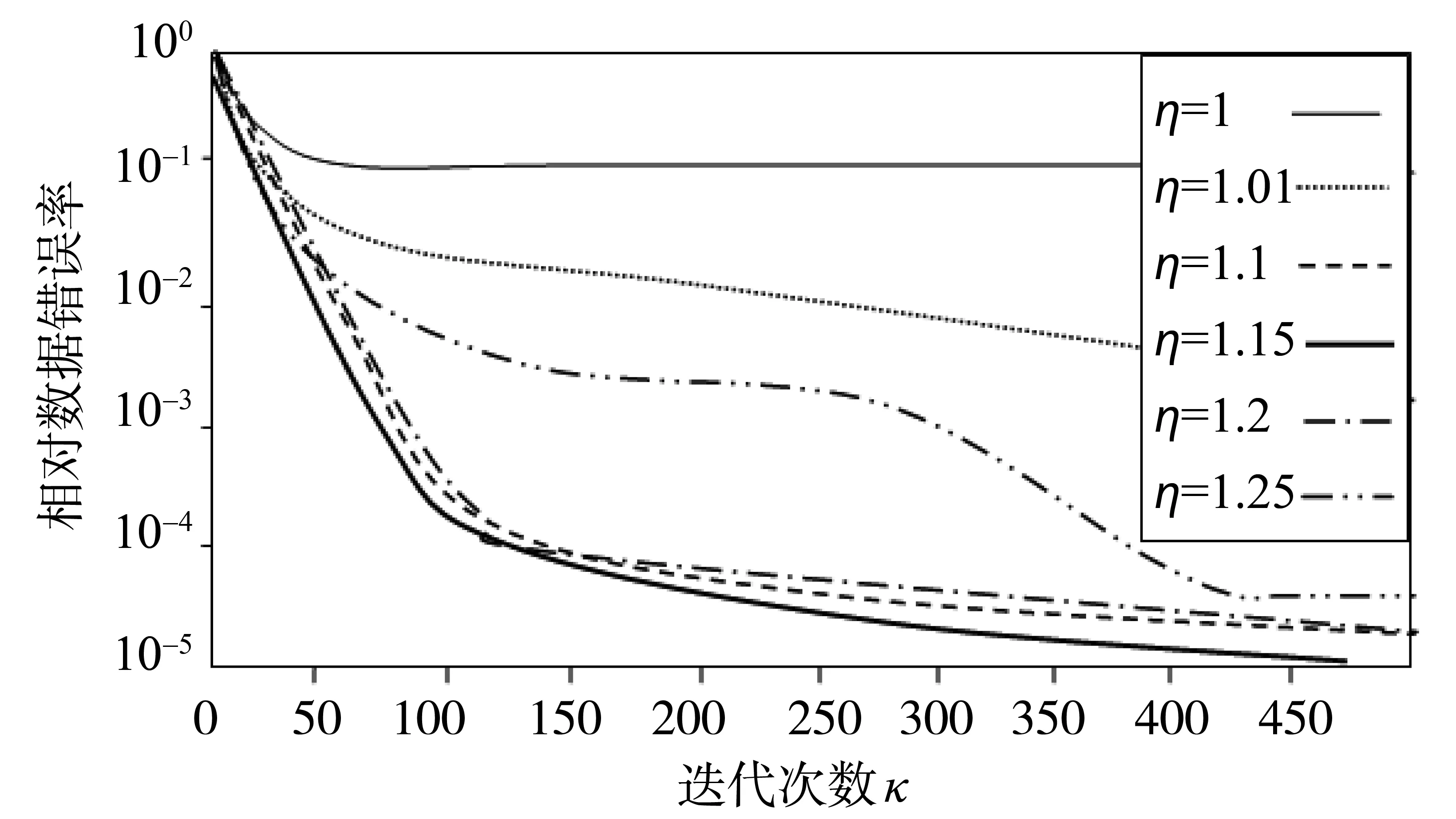
这里x∈Rn,A∈Rm×n,card(x)表示张成希尔伯特空间x的非零元素集,X是x的全体。目前,解决(1)式的几种主要算法是基于最小l1范数的凸优化算法、匹配追踪等贪婪算法[1 - 5]。为了改进最小l1范数算法的信号恢复性能,Candes和Daubechies等[6-7]分别提出了迭代重加权l1和迭代重加权最小二乘IRLS-p(0 (2) Chartrand等[9 - 10]证明,在A的零空间假设条件下,核范数最小化IRLS-1算法的输出与最低秩A(X)=b的结果是一致的。同时,他说明在p<1时IRLS-p比最小l1范数具有更好的信号恢复性能。基于此条件,利用几何影射学原理[11],通过每次迭代时对加权F范数(即Frobenius Norm)的最小化处理,本文分析了一类扩展EIRLS-p算法的性能。在此基础上,通过梯度投影GP(Gradient Projection)简化迭代二乘目标函数的求解过程,进而实现了一类短时迭代重加权最小二乘算法(简称sEIRLS-p算法)。本文研究的目的是,实现压缩感知理论下EIRLS-p算法的收敛性与实时性之间的有效折中,为信号高质量恢复提供一种新的研究参考。 定义矩阵X的核范数为‖X‖*=∑iσi(X),其中σi(X)代表了X中第i个最大奇异值。由此,对于求解压缩感知理论的(1)式问题,我们可以得到一种最小核范数关系式: (3) (3)式的求解类似于凸优化最小l1范数算法,但凸优算法的最大问题是迭代收敛性能较差[13]。为此,我们考虑(3)式的一种秩函数非凸优近似求解方法。定义F(Frobenius)范数下的一种平滑Schatten-p函数形式为 (4) 这里Tr(·)为矩阵的迹。由矩阵迹函数的性质可知,当p>0时,函数fp(X)是可微的;当p≥1时,fp(X)具有凸性;而满足γ=0∪p→0时,fp(X)→rank(X)。当p=1,γ=0时,f1(X)=‖X‖*称为Schatten-1范数。因此,对(3)式的求解近似于求解以下问题: minfp(X)s.t.A(X)=b (5) 注意到对(4)式取微分有:▽fp(X)=pX(XTX+γ·I)p/2-1。代入(5)式,则其成立的一种KKT方程条件(Karush-Kuhn-Tucker最优化条件)可写为[14]: X(XTX+γ·I)p/2-1+A*(λ)=0 A(X)=b (6) 其中,A*(λ)表示特征值为λ时矩阵A的共轭矩阵。对(6)式KKT条件1求解有: (7) (8) 由式(7)、(8)可见,Xk+1满足了(6)式的KKT条件,且遵循了(9)式的凸优化关系: (9) 说明,秩最小化EIRLS-p系列算法就是对应压缩感知凸优化算法的一种近似扩展。 为了准确分析EIRLS-1算法连续迭代收敛的特性,定义F范数意义下的一种函数: γTr(W)+Tr(W-1)) (10) 其中Z∈G(b),G(b)为零状态空间中A(X)=b的希尔伯特空间解集。当p=1时,EIRLS-p算法的第2步迭代等价于 Xk+1=argminZ∈G(b)Γ(Z,Wk,γk) (11) 选择γk+1=min{γk,σK+1(XK+1)/N,其中K和N是固定整数。把(10)式加权矢量代入(11),并根据矩阵迹和F范数的性质,我们可以同时得到以下迭代关系[14-16]: (12) 且有关系 Γ(Xk+1,Wk+1,γk+1)≤Γ(Xk+1,Wk,γk+1)≤ Γ(Xk+1,Wk,γk)≤Γ(Xk,Wk,γk) (13) 由此,对于任意k≥1,我们有关系‖Xk‖*≤Γ(X1,W0,γ0):=D。这里,W0=I,γ0=1。且存在σi(Wk)≥D-1,j=1,2,...,min[m,n]。这说明,在张成希尔伯特零状态空间内,通过选择一定的调节参数γ,EIRLS-1算法总能够有效收敛,且能够用具有唯一最小化秩的核范数矩阵表示[11,17]。 为了说明EIRLS-0实现算法的收敛性,定义一种对于W和X都严格凸性的F范数函数: Η(X,W,γ)=Tr(WXTX)+γ·TrW-logdetW (14) 其中,detW表示矩阵W的行列式。根据矩阵迹和F范数的性质,类似于公式(13)存在如下关系: H(Xk+1,Wk+1,γk+1)≤H(Xk+1,Wk,γk+1)≤ H(Xk+1,Wk,γk)≤ H(Xk,Wk,γk) (15) 对于任意k≥1,我们有logdet(XkTXk)≤H(X1,W0,γ0):=E。设σj(Wk)为加权矩阵W第k次迭代的第j个奇异值,则存在有不等关系式σj(Wk)≥e-E,j=1,2,...,t.其中,t=min[m,n]。这也说明了EIRLS-0算法能够有效收敛,且能够用一种稳定的矩阵形式唯一表示。 借鉴梯度投影对交替迭代优化求解的实现过程[18],我们在构造低秩矩阵时,把矩阵X的实现问题也可通过梯度投影(GP)方式进行计算,并得到EIRLS-p算法实现的另一种形式-短时扩展迭代重加权最小二乘(sEIRLS-p)算法。其满足关系: minrank(X)s.t.ΡΩ(X)=ΡΩ(X0) (16) 这里,X0是我们要恢复的信号数据矩阵。ΡΩ:Rn×n→Rn×n,表示矩阵X在支撑Ω中投影时数据元素Xij的投影算子,(i,j)∈Ω。sEIRLS-p算法的实现过程描述如下: 设置k=0,X0=0,按以下步骤迭代计算: 3) 设置k=k+1。重复1)-3)直到收敛。 由此可见,对于固定的γ参数,sEIRLS-p(0 在不同条件下,为了使EIRLS算法能够用低秩矩阵实现数据的高概率恢复,同时又能使系统满足实时性要求,我们用梯度投影关系ΡΩ(X)=ΡΩ(X0)替代EIRLS-p算法中A(X)=b的约束条件。同时,用梯度投影(GP)算法求解EIRLS算法中每次迭代的最小二乘运算过程。为此,我们得到一种快速sEIRLS-p算法的具体实现方式如下: 设置k=0,X0=0,按以下步骤迭代: 2) 设置梯度投影常数为L,进行梯度投影(GP)。 b)Xold=Xnew.返回a)迭代直到GP收敛。 3)Xk+1=Xnew,k=k+1,返回1)直到EIRLS-p算法收敛。 算法中,GP的步长为2/Lk,Lk是二次方函数Tr(WkXTX)在第k次迭代的利普希兹(Lipschitz) 梯度常数。由算法可见,GP算法是利用EIRLS算法第k次迭代的结果作为第(k+1)次迭代梯度投影的先验条件,然后寻找每次迭代加速收敛的一种实现过程。 设原始数据矩阵为X,由Y·YT产生,其中Y为I.I.D高斯分布的数据矩阵,且Y∈Rn×r,n=500。归一化要恢复的矩阵为X0(最大奇异值为1),其大小为500×500。X0的秩r分别设置为5、10、15,同时,我们定义当算法恢复的信号数据相对错误率ξ=‖X-X0‖F/‖X0‖F≤10-3时,信号恢复是成功的。实验时,支撑Ω通过均值为q的贝努立{0,1}随机值产生。所做实验用Matlab在Intel双核处理器上执行,其CPU为3 GHz,RAM大小为3.25 GB。 图1 n=500,p=0, η=1.15,不同γc条件下EIRLS-p算法的实现性能Fig.1 n=500,p=0, η=1.15, implementation performances of EIRLS-p to different γc 由图1可见,当γc<10-3时,收敛速度较快,但相对错误率ξ值较大;而当γc>10-3时,相对错误率ξ较小,但收敛速度较慢。因此,γc的选择是影响EIRLS-p算法实现性能的关键。由验证实验结果可知,选择γc=10-3,EIRLS-p算法恢复数据的性能最好。 刻度参数η的选择:设置γc=10-3,定义秩为r的矩阵X0的自由度为r(2n-r),矩阵X0的自由度率FR=r·(2n-r)/q,采样率SR=q/n2。通过实际计算过程可知,如果FR>0.4或接近于1,算法恢复矩阵X0就很困难;反之,如果FR<0.4或接近于0,则恢复X0就比较容易。 图2表示了EIRLS算法与刻度参数η的敏感性关系。算法实现时,当确定γ0后,η取决于X0的秩和SR的大小。对于不同条件的X0实现问题,我们随机产生10个支撑。由图可见, 如果X0的秩r=5、10、15,FR=0.18、0.2、0.33时,η=1.15、1.1、1.05,算法恢复数据的错误率都较低,其实现性能都较好。 图2 n=500,γc=10-3,不同η条件下EIRLS算法的实现性能Fig.2 n=500, γc=10-3,implementation performances of EIRLS to different η 算法实现时,我们认为当数据相对错误率ξ≤10-3时,表示算法成功恢复了原始信号,并用NS作为成功恢复的次数。实验时选择γc=10-3,同时,当FR<0.4时,选择η=1.1;而当FR≥0.4时,选择η=1.03。表1列出了当FR<0.4时,在相同实验参数设置下算法的实现性能,并与SVT算法进行了比较。可见,EIRLS-0,sEIRLS-0,EIRLS-1,sEIRLS-1算法都能够较好地恢复原始数据,但SVT在某些情况下却是无效的。由表也可以看到,EIRLS-0比EIRLS-1算法收敛时需要更少的迭代次数和更低的计算时间。而在各种情况下,sEIRLS-0算法具有最好的实时性能。 表1 EIRLS和SVT算法的实现性能比较(FR<0.4)Table 1 Performances comparison for EIRLS and SVT algorithm (FR<0.4) 表2说明了当FR≥0.4时,算法sEIRLS-1、EIRLS-0、sEIRLS-0的实现性能。由表可见,在不同条件下,EIRLS-0、sEIRLS-0都能较好地恢复原始数据,但sEIRLS-1算法在某些情况下是无效的(SVT在各种条件下都不能执行,因此这种情况下没有列出)。当n>500后,相比其它算法,sEIRLS-0具有更好的实时性能。 由以上的结果可见,在sEIRLS-p、EIRLS-p系列算法中,sEIRLS-0实时性更强、实现性能最好。因此这里,我们主要比较sEIRLS-0和IHT算法的实现性能。在不同情况下,表3和4分别列举了两种算法实现时的需要的迭代次数、恢复次数NS以及计算时间。由表3可见,当FR<0.4时,两种算法具有一定的可比较性。而当FR≥0.4时,由表4可见,sEIRLS-0算法的实现性能明显优于IHT算法。 表2 EIRLS算法的实现性能分析(FR≥0.4)Table 2 Performances analyzing for EIRLS algorithm (FR≥0.4) 表3 sEIRLS-0和IHT算法的实现性能比较(当FR<0.4时)Table 3 Performances comparison for sEIRLS-0 and IHT algorithm (FR<0.4) 表4 sEIRLS-0和IHT算法的实现性能比较(FR≥0.4时)Table 4 Performances comparison for sEIRLS-0 and IHT (FR≥0.4) 基于几何影射求矩阵秩最小化问题,分析了EIRLS-p和sEIRLS-p的系列实现算法,并分析了它们在各种情况下的收敛性和实时性。在零状态空间及其假设条件下,EIRLS-1算法能够收敛到唯一核范数函数,这与最低秩矩阵满足几何影射的约束条件是一致的。我们也说明了EIRLS-0和sEIRLS-p算法收敛到最小平滑函数的稳定点问题,并给出了通过梯度投影实现算法的具体结构。在不同条件下的实验结果表明,EIRLS-0和sEIRLS-0算法比SVT算法具有更好的实现性能。而相比于IHT算法,当矩阵秩信息未知时,sEIRLS-0算法的性能具有明显的优势。未来的工作,结合非凸优问题,我们主要研究EIRLS-0和sEIRLS-0算法的实现效果和收敛率,并将其尽快应用于信息安全的数据处理研究领域。 [1] ARORA S, DASKALAKIS C, STEURER D. Message-passing algorithms and improvedlpdecoding[C]∥ Proc 41st annual ACM symposium on Theory of Computing, 2009:3-12. [2] 周燕,张德丰,马子龙. 基于压缩感知的图像哈希水印算法研究[J].中山大学学报:自然科学版,2010,49(6):58-63. [3] CANDES E J,RECHT B. Exact matrix completion via convex optimization[J]. Foundations of Computational Mathematics, 2009, 9(6):717-772. [4] CANDES E J,BECKER S. Software for singular value thresholding algorithm for matrix completion[EB/OL]. Available at http://svt.caltech.edu/code.html. 2010. [5] 杨海蓉,张成,丁大为,等.压缩感知理论与重构算法[J].电子学报,2011,39(1):142-147. [6] CANDES E J, WAKIN M B, BOYD S. Enhancing sparsity by reweightedl1 minimization [J]. Journal of Fourier Analysis and Applications, 2008, 14(5):877-905. [7] DAUBECHIES I, DEVORE R, FOMASIER M, et al. Iteratively re-weighted least squares minimization for sparse recovery[EB/OL]. http://arXiv.org/abs/0807.0575. 2008. [8] MOHAN K ,FAZEL M. Reweighted nuclear norm minimization with application to system identification[C]∥ Proc. American Control Conference(ACC), 2010:2953-2959. [9] CHARTRAND R, STANEVA V. Restricted isometry properties and nonconvex compressive sensing[J]. Inverse Problems, 2008, 24(035020):1-14. [10] CHARTRAND R,YIN W. Iteratively reweighted algorithms for compressive sensing[C]∥ 33rd International Conference on Acoustics, Speech, and Signal Processing (ICASSP), 2008:3869-3872. [11] KARTHIK M, MARYAM F. Iterative reweighted least squares for matrix rank minimization[C]∥Forty-Eighth Annual Allerton Conference, USA, 2010:653-661. [12] GOLDFARD D, MA S. Convergence of fixed point continuation algorithms for matrix rank minimization[R]. Technical Report, Available at http://www.columbia.edu/sm2756/FPCAconvergence.pdf.2009. [13] GROSS D, LIU Y K, FLAMMIA S T, et al. Quantum state tomography via compressed sensing[EB/OL]. Preprint available at http://arxiv.org/PS cache/arxiv/pdf/0909/ 0909.3304v2.pdf. 2010. [14] 魏木生. 广义最小二乘问题的理论和计算[M].北京:科学出版社,2006:161-165. [15] MEKA R, JAIN P, DHILLON I S. Guaranteed rank minimization via singular value projection[EB/OL]. Available at http://arxiv.org/ abs/0909. 2009:54-57. [16] LEE K, BRESLER Y. ADMIRA: Atomic decomposition for minimum rank approximation[EB/OL]. Available at http://arxiv.org/abs/0905.0044. 2009. [17] LU Z, PONG T K. Interior point methods for computing optimal design[EB/OL]. Available at http://arxiv.org/PS cache/arxiv/pdf/1009/ 1009.1909v1.pdf. 2010. [18] 练秋生,周婷. 结合字典稀疏表示和非局部相似性的自适应压缩成像算法[J].电子学报,2012,40(7):1416-1422.
1 几何影射EIRLS-p算法
1.1 EIRLS-1实现的收敛性
1.2 EIRLS-0实现的收敛性
2 基于梯度投影的sEIRLS-p算法
2.1 sEIRLS-p算法的实现原理
2.2 sEIRLS-p算法的快速梯度投影


3 算法的验证及其性能分析
3.1 算法验证的参数选择


3.2 算法的实验结果及其性能比较




4 总结与展望
猜你喜欢
数学物理学报(2022年5期)2022-10-09数学物理学报(2022年5期)2022-10-09波谱学杂志(2022年1期)2022-03-15安阳工学院学报(2020年4期)2020-09-11新课程·上旬(2019年1期)2019-03-18中国校外教育(下旬)(2017年8期)2017-10-30教师·中(2017年3期)2017-04-20试题与研究·教学论坛(2016年27期)2016-08-11