极化空时自适应处理性能分析
2014-04-21 07:44杜文韬廖桂生杨志伟
西安电子科技大学学报 2014年1期
杜文韬,廖桂生,杨志伟
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071)
极化空时自适应处理性能分析
杜文韬,廖桂生,杨志伟
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071)
在建立极化空时信号模型的基础上,对全维空时自适应处理(STAP)的输出信杂噪比的计算式进行了分析,对比了该情况下极化空时自适应处理与STAP的性能,并指出了影响极化空时自适应处理性能的几个主要因素.仿真结果验证了分析结论的正确性.
极化雷达;目标检测;极化信号处理;空时自适应处理
运动平台雷达检测地面目标具有检测范围广、发现目标迅速等优点,正在成为地面动目标检测的重要体制.但是,平台运动将产生场景杂波的多普勒展宽,慢速目标常淹没在杂波中难以检测.针对这一问题,采用空时二维自适应处理[1-3]可有效利用空间角度和多普勒信息抑制杂波,提高系统的最小可检测速度(MDV)[4].然而,由于运动平台下雷达孔径受到限制,最小可检测速度常常不能满足需要.
为了进一步提高系统对慢速目标的检测能力,结合雷达回波的极化信息[5],进行极化、空间角度、多普勒三维自适应处理,可在不增加天线孔径的前提下提高系统的MDV,相比于空时二维算法具有更好的慢速目标检测性能.迄今为止,极化空时自适应算法的研究已经获得了大量的成果.文献[6]基于广义似然比(GLR)原理提出了一种自适应极化空时目标探测算法(SPST-GLRT),接近最优处理效果;文献[7]提出一种自适应极化空时联合雷达目标探测算法(PST-GLR),该方法仅在角度域和多普勒域指定引导向量,而极化域没有指定,从而降低了算法的实现复杂度;为解决算法所需要的训练数据数量过大的问题,文献[8]在极化空时域引入局域化处理方法;文献[9]在HH和VV两极化通道数据模型下对极化空时自适应算法进行了分析,但是缺少对全极化通道下的检测性能分析;文献[10]提出将极化空时自适应算法从接收一对同极化数据推广至全极化数据,但并没有深入地、理论地分析全维处理的性能.
在上述分析的基础上,笔者首先推导了全极化通道数据下的完全极化波与非完全极化波的信号模型,定量地对比了极化空时自适应算法与空时二维算法的性能,并分析得到了如下结论:(1)增加极化信息可以改善空时自适应处理的检测性能.(2)目标与杂波极化主空间区分度、杂波极化相关性以及极化通道数是影响检测性能的主要极化域因素.最后,通过仿真验证了文中结论的正确性.
1 信号模型
图1为运动平台阵列雷达观测示意图,其中,va为平台速度,H为平台运动高度,α和β分别表示杂波地块相对阵面的方位角和俯仰角,θcone表示载机速度矢量对于杂波的空间锥角.设雷达含有M个收/发通道,每个通道均含有一对正交极化天线同时发射和接收水平/垂直极化信号.为便于分析,假设阵列在空间上均匀排布(间距为d).

图1 运动平台雷达观测示意图
设指定距离单元中含有运动目标,雷达回波数据可表示为

其中,Nc为该距离单元内的杂波地块数;⊗为Kronecker乘积运算符;gi和γi分别为第i个杂波地块的等效增益和等效后向散射系数,在短时脉冲积累时间内可认为是固定值;x、xt和n分别为回波信号、目标信号以及噪声信号;sip、sis和sit分别为第i个杂波地块的极化导向矢量、空间导向矢量和时间导向矢量.
在空间阵元位置均匀分布的情况下,杂波的时间导向矢量和空间导向矢量分别为

,分别为空间频率和多普勒频率;λ为波长;prf为脉冲重频.
雷达极化回波的全极化数据矢量可表示为[SHH,SHV,SVH,SVV]T,且在单站后向散射情况下根据互易定理,有SHV=SVH.设杂波为完全极化波,其全极化数据的导向矢量可表示为

在杂波回波为非完全极化波时(实际中的大多数情况),需使用相关矩阵描述其极化特性.杂波数据x的联合相关矩阵可表示为


其中,r和ε分别为通道HV、通道VV与通道HH数据平均功率的比值,ρ1、ρ2、ρ3和η1、η2、η3分别为通道HV与HH、通道VV与HH、通道VV与HV的平均相关系数和平均相位差.
2 极化空时自适应处理
首先从输出信杂噪比的角度建立分析模型,接着对比极化空时自适应算法与空时二维处理的性能,最后通过分析指出几种主要的影响因素.
2.1 分析模型
极化空时全维自适应处理的权矢量wopt为

其中,k为非零常数,s0为目标的极化空时联合导向矢量,s0=sp⊗st⊗ss.下面通过输出信杂噪比(SCNR)分析系统的检测性能,其在杂波相关矩阵确知时的计算式为其中,表示目标信号的能量.

为分析信杂噪比的计算式,首先对Rp和Rst分别进行特征分解,并将特征值按照从大到小的顺序进行排列,即

设目标的极化空时导向矢量s0=sp⊗sst,输出的信杂噪比可表示为

由于Rp为半正定矩阵,且tr(Rp)=1,故其特征值在0~1范围内.另一方面,对称矩阵的特征向量之间相互正交,且Rp的特征向量和sp均是模1的,因此,则有

故利用极化信息可以改善空时自适应处理的检测性能.
2.2 影响因素
下面从输出信杂噪比计算式的角度指出几类主要的影响因素.类似于杂波的空时相关矩阵,杂波极化相关矩阵同样由极化主空间与副空间构成,通常也称为信号子空间与噪声子空间.当杂波为完全极化波时,其主空间维数为1,副特征值为0;当杂波为部分极化波时,主特征值随着相关性的下降而降低,而副特征值逐渐上升;当杂波为完全非极化波时,其特征空间无主、副之分.现实中大部分目标的极化相关性大于0.因此,这里仅考虑完全极化波与部分极化波.
设杂波极化相关矩阵Rp由维数为b的主空间Um与维数为L-b的副空间Uau组成,即

其中,主、副特征值λm,i和λa,i的大小与杂波极化相关性有关.
输出信杂噪比为

设目标极化导向矢量sp与第i个极化特征向量αi的夹角为χi,sp向极化主空间Um投影的角度为φ,同时设sp在主空间Um和副空间Uau的投影矢量与对应空间内各个特征向量之间的夹角为φi.根据余弦的计算定理,可以得到

则输出信杂噪比可表示为

由该式可知,极化投影角φ、特征值λm,i和λa,i以及极化通道数L共同影响极化空时自适应算法的检测性能,分别对应于目标极化导向矢量与杂波极化主空间的区分度、杂波相关性以及自适应处理使用的极化通道数据的个数.特别地,当杂波回波为完全极化波时,极化投影角即为目标与杂波的极化导向矢量的角度差.空时二维区分度对自适应处理的影响因素分析类似,具体详见文献[11].
3 仿真结果
为验证上述结论,使用机载仿真数据对极化空时自适应检测性能进行分析.仿真参数如下:设发射信号波长为0.1 m(S波段内);俯仰向阵列经合成之后,天线在方位向等效为8个间距半波长的收发通道,并相干处理12个脉冲;平台运动速度为150 m/s;脉冲重复频率为1 500 Hz.仿真采用全极化数据:HH通道下累积的信噪比和杂噪比分别为15 dB和30 dB;杂波HH通道和VV通道的能量一致,而相位超前90°,HV通道和HH通道的相位一致,而能量低10 dB;同时假设目标的两个同极化通道的数据能量一致,且比交叉极化高5 dB.
3.1 极化通道数
规定目标的全极化导向矢量sp,使得极化投影角度为45°,双极化采用HH/VV通道数据进行仿真,如图2所示.可以看到,随着极化通道个数的增加,检测性能逐渐上升.这一现象主要有两方面原因:(1)信号积累的能量与通道个数成正比.(2)极化滤波增加了处理器的自由度.对比两幅图像可以发现,随着极化相关系数的增加,慢速目标的检测性能得到了改善.

图2 不同极化相关系数下的输出信杂噪比(SCNR)曲线
3.2 杂波极化通道间的相关性
从最小可检测速度MDV、平均输出信杂噪比损失两个方面考察杂波极化通道间相关性对检测性能的影响.为有效分析损失值的大小,定义平均输出信杂噪比损失为

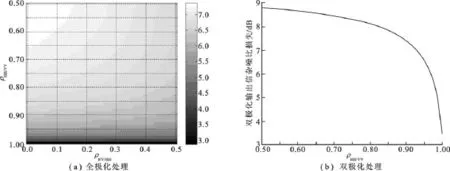
图3 输出信杂噪比的损失
其中,RSCNref为参考的输出功率,RSCNL为感兴趣速度区间v1~v2内的输出信杂噪比.
设系统感兴趣的测速区间为0~20 m/s,目标极化导向矢量sp的设置同上,仿真结果如图3所示.
可以看到,同极化相关性ρHH/VV的增加可显著改善系统的输出RSCN,对于全极化数据,随着ρHV/VV的增加,系统的RSCN损失也呈现降低趋势,但是由于相关系数值偏低,其影响较小.
3.3 极化区分度
设全极化数据的同极化相关系数为0.9,交叉极化相关系数为0,fdn表示归一化的多普勒频率仿真结果.由图4可以看到,随着目标与杂波极化信号子空间投影角度的增加,极化空时自适应算法的性能逐渐上升;对于低速目标,较高的极化投影角可大幅度地提高检测性能,有效消除空时二维处理中的盲速区间,提高了系统的目标检测能力.
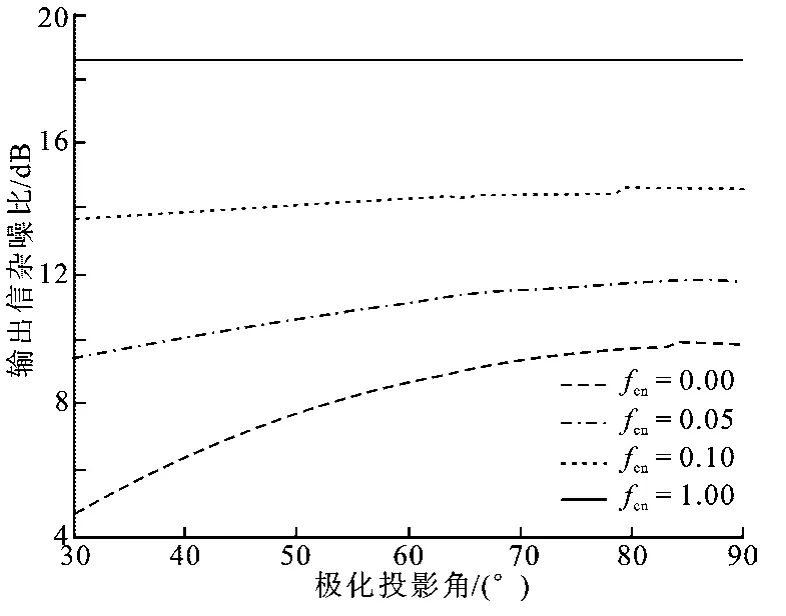
图4 全极化处理输出信杂噪比的曲线
4 结束语
基于对输出信杂噪比值计算式的分析,指出了极化空时自适应算法的主要影响因素,证明了增加极化域信息可以改善系统的检测性能.仿真结果表明,当目标的多普勒频率较低时,极化投影角度的增加,可以显著地改善系统的动目标检测性能;而当目标的速度较大时,此时空时域已经有很好的检测效果.增加极化区分度获得的改善有限,但是随着极化通道个数、极化相关性的增加,检测性能可以进一步获得提升.
[1]Melvin W L.A STAP Overview[J].IEEE Transactions on Aerospace and Electronic Systems,2004,19(1):19-35.
[2]Cristallini D,Burger W.A Robust Direct Data Domain Approach for STAP[J].IEEE Transactions on Signal Processing,2012,60(3):1283-1294.
[3]李彩彩,廖桂生,朱圣棋,等.一种多普勒后处理的STAP方法研究[J].西安电子科技大学学报,2009,36(2):240-244. Li Caicai,Liao Guisheng,Zhu Shengqi,et al.Study of Post-doppler Processing STAP Method[J].Journal of Xidian University,2009,36(2):240-244.
[4]Ginolhac G,Forster P,Pascal F,et al.Performance of Two Low-rank STAP Filters in a Heterogeneous Noise[J]. IEEE Transactions on Signal Processing,2013,61(1):57-61.
[5]Wang Na,Hu C B,Zhao L J,et al.Polarimetric SAR Target Detection Based on Polarization Synthesis[C]//IEEE International Geoscience and Remote Sensing Symposium.Piscataway:IEEE,2012:5899-5902.
[6]Kelly E J.An Adaptive Detection Algorithm[J].IEEE Transactions on Aerospace and Electronic System,1986,22(1): 115-127.
[7]Park H R,Kwak Y K,Wang H.Efficient Joint Polarization Space-time Processor for Nonhomogeneous Clutter Environments[J].Electronics Letters,2002,38(25):1714-1715.
[8]Park H R,Wang H.Adaptive Polarization-space-time Domain Radar Target Detection in Inhomogeneous Clutter Environments[J].IEE Proceedings-Radar,Sonar and Navigation,2006,153(1):35-43.
[9]Wu D J,Xu Z H,Zhang L,et al.Polarization-space-time Adaptive Processing for Clutter Suppression in Airborne Radar Systems[C]//Second International Conference on Digital Manufacturing and Automation.Piscataway:IEEE Computer Society,2011:855-858.
[10]Delcora P,Pierfrancescro L,Tullio B.Adaptive Polarimetric Target Detection with Coherent Radar[J].IEEE Transactions on Aerospace and Electronic Systems,2001,37(4):1194-1220.
[11]Wang H,Cai L J.On Adaptive Spatial-Temporal Processing for Airborne Surveillance Radar Systems[J].IEEE Transactions on Aerospace and Electronic Systems,1994,30(3):660-669.
(编辑:齐淑娟)
Performance analysis of the polarization-space-time adaptive processing
DU Wentao,LIAO Guisheng,YANG Zhiwei
(National Key Lab.of Radar Signal Processing,Xidian Univ.,Xi’an 710071,China)
By the utilization of the additional polarized information,the minimum detectable velocity could be improved for space time adaptive processing under the polarimetric radar system.In this paper,the performance of polarization space time adaptive processing is analyzed and compared with the traditional space-time adaptive processing based on the output signal to clutter plus noise ratio,and the primary affecting factors of three dimensional processing are indicated.A preliminary result against an airborne simulation data verifies the conclusion.
polarimetric radar;target detection;polarized signal processing;space-time adaptive processing
TN959.1
A
1001-2400(2014)01-0001-05
10.3969/j.issn.1001-2400.2014.01.001
2013-03-21 < class="emphasis_bold">网络出版时间:
时间:2013-09-16
长江学者与创新团队发展计划资助项目(IRT0954);国家自然科学基金资助项目(60901066);国家部委预研基金资助项目(9140xxxx001);中央高校基本科研业务费专项资金资助项目(K5051302007)
杜文韬(1989-),男,西安电子科技大学博士研究生,E-mail:duwentao_xd@163.com.
http://www.cnki.net/kcms/detail/61.1076.TN.20130916.0926.201401.1_031.html
猜你喜欢
现代财经-天津财经大学学报(2022年5期)2022-06-01
航天电子对抗(2022年2期)2022-05-24
科学与信息化(2021年30期)2021-12-24
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
航天电子对抗(2019年4期)2019-06-02
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
西北工业大学学报(2015年3期)2015-12-14