
火星探测可见光遥感相机的发展现状与趋势
2014-05-16 09:29董吉洪孟庆宇
中国光学 2014年2期
王 维,董吉洪,孟庆宇
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
1 引言
火星是太阳系中离地球最近的一颗行星,其轨道、体积、密度等重要参数都与地球非常相像[1]。很多人都相信火星上曾经存在过生命,而人类也寄希望于将来能够将火星建造成为第二个地球。另一方面,通过对火星气候特征和地质特征的研究,也有助于了解地球气候的形成与地质结构的变化。因此,火星探测成为各国深空探测的主要目标。自1960年起,世界各国已先后实施了40多次火星探测。然而,在2000以前,受技术能力所限,大部分任务均以失败告终,但少数成功的探测任务确使人类对火星的认识取得了重要的突破。1971年5月,美国发射了“水手9”号火星探测器,成为第一颗人造火星卫星,其上携带的光学遥感相机对火星表面进行了拍照,共计向地球传回了7 000余张照片。1997年,美国的“火星探路者”号成功登陆火星,并首次实现了火星表面行走,获得了大量的图像数据和化学分析数据[2]。其他成功的项目还有“水手 4”号、“海盗1”号、“海盗2”号、“火星全球勘探者”号等。
21 世纪以来,随着技术手段的逐步提高,火星探测任务的成功率有了显著提高,火星探测的公众影响力也逐步扩大。这期间,美国共发射了“勇气”号、“机遇”号、“凤凰”号、“好奇”号等多个火星登陆器,以及“奥德赛”号、“火星勘测轨道飞行器”号等多个轨道探测器。欧空局也在2003年发射了“火星快车”号轨道探测器。这些探测器详细测定了火星大气层的成分和分布,为人类绘制了火星表面磁场、地形、地貌特征和岩石矿物的详细分布图,发现了火星可能含有地下水的重要证据,使得人类对火星的认识达到了前所未有的高度。
可见光遥感观测在火星探测任务中是最基础也是最重要的手段。目前已发射的绝大部分轨道探测器上都搭载了可见光遥感载荷,因可见光遥感观测可以获得火星表面最直观的图像数据,这对于了解火星的地形地貌特征具有重要意义。此外,可见光遥感观测还可为火星登陆器寻找并确认最佳着陆地点,为火星巡视器规划巡视路径。
鉴于可见光遥感相机在火星探测领域的重要价值,本文综述了近20年来国际上具有代表性的火星探测遥感相机的发展情况,重点介绍了其科学应用目标与主要技术指标,总结了火星可见光遥感的发展趋势。结合对不同目标观测分辨率需求的分析,为我国今后开展火星可见光遥感观测提供了指标选择和设计的依据。
2 火星探测遥感相机
2.1 火星观测相机(MOC)
MOC相机搭载在1996年美国发射的“火星全球勘探者”号火星探测器上,由一台窄视场相机和两台红、蓝谱段宽视角相机组成,如图1所示[3]。两台宽视角相机采用大视场角(±70°)的透射式光学系统,完成对火星表面的全覆盖成像,其中的窄视场相机采用了R-C反射式光学系统,分辨率达到1.4 m,刈幅宽度约3 km。其科学目标主要针对火星的气候和地理科学研究,包括火星两极沉积物、极地冰盖、沟渠地貌的特性、形成与演化过程,火星大气与地表的相互影响,以及火星的火山和峡谷等(相机的主要技术指标见表1)。

图1 MOC相机Fig.1 Mars Observer Camera(MOC)
2.2 高分辨率立体相机(HRSC)
2003年欧空局发射的火星快车号(Mars Express)上携带了一台HRSC相机,由立体彩色扫描仪(Stereo Colour Scanner,SCS)和超分辨率通道(Super Resolution Channel,SRC)组成,如图 2所示[4]。

图2 HRSC相机Fig.2 High Resolution Stereo Camera(HRSC)
HRSC相机的主要科学目标包括火山、大气、水等地质作用对火星地质演化的影响,寻找火星上的潜在资源,以及观测火星卫星一号和火星卫星二号等[5]。主要任务是对火星进行不同分辨率的全球遥感覆盖,立体彩色扫描仪以100 m/pixel分辨率覆盖全部火星表面,以10 m/pixel分辨率覆盖50%火星表面。超分辨率通道采用折反射式光学系统,最高分辨率可达2.3 m/pixel,在轨期间至少能够覆盖1%的火星表面,并观测火星卫星[4](相机主要技术指标见表1)。
2.3 高分辨率科学成像试验相机(HiRISE)
2005年NASA发射了“火星勘测轨道飞行器”号,上面搭载了一台高分辨率科学成像实验相机HiRISE,如图3所示[6]。该相机的主要任务目标是寻找火星上是否存在水源的证据,同时收集火星的大气与地理特征。并为后续的计划任务评估合适的着陆地点,确保可以持续进行更多的科学研究,以降低着陆风险[6]。HiRISE相机采用同轴三反消像散光学系统,最高分辨率可达0.25 m/pixel,是目前国际上分辨率最高的火星遥感相机。HiRISE相机同时还具备立体成像功能[7]。

图3 HiRISE相机Fig.3 HiRISE Camera
除HiRISE外,MRO上还搭载了一台背景成像仪(CTX),用于为HiRISE拍摄背景图像。CTX采用了折反射式光学系统,地面刈幅宽度可达30 km(300 km轨道高度)。HiRISE相机和CTX相机的主要技术指标列在表1中[8]。
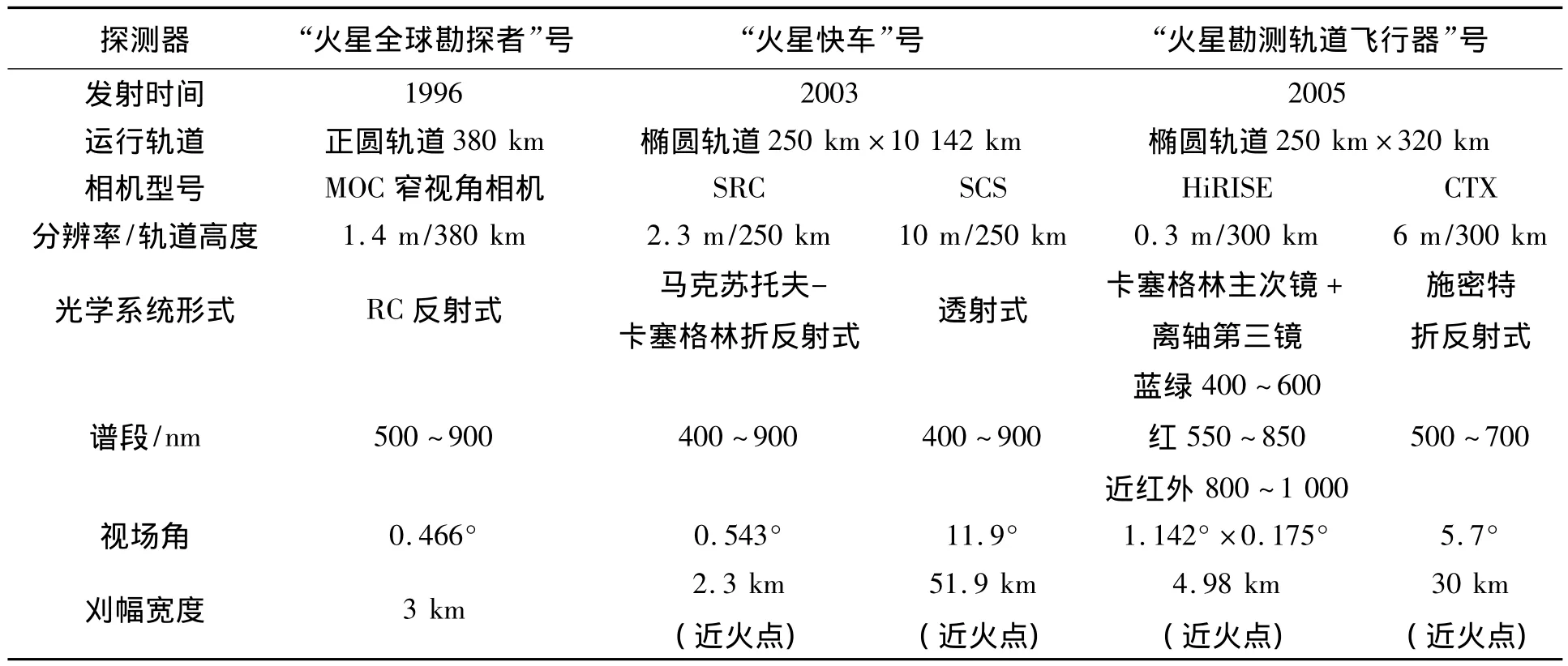
表1 国外火星探测高分相机技术参数比较Tab.1 Parameters comparison of high resolution camera for mars exploration
3 火星遥感相机的发展趋势
3.1 开展亚米级分辨率精细观测
图4给出了不同分辨率观测图像对火星表面的覆盖情况[5]。从图中可以看出,近20年来,随着大口径主镜支撑[9-10]、遥感器热控[11]、星上图像处理[12-15]等光学遥感器关键技术水平的逐步提高,人类已经有能力以较高的分辨率(10 m以下)观测火星。火星可见光成像遥感的热点也由早期的中等分辨率(百米量级)全球遥感逐渐发展到对局部区域的高分辨率精细观测。
目前,火星快车号已经完成了对100%火星表面的100 m分辨率观测和50%火星表面的10 m分辨率观测。根据这些数据,已经能够绘制较为详细的火星地图。对于10 m以下的高分辨率观测,目前国际上各个项目总的覆盖率也不超过1%。因此,开展小范围精细观测,尤其是1 m以下的高分辨率观测,是未来火星遥感观测的主要发展趋势。通过亚米级分辨率成像可以得到火星表面岩石及地貌特征的精确数据,是判断火星地质演化过程的重要依据。然而,受体量和数据率等技术条件的限制,目前仅有美国的HiRISE相机达到了1 m以下的分辨率水平。因此,亚米级分辨率精细观测也是未来寻求火星探测重大科学发现的突破口。
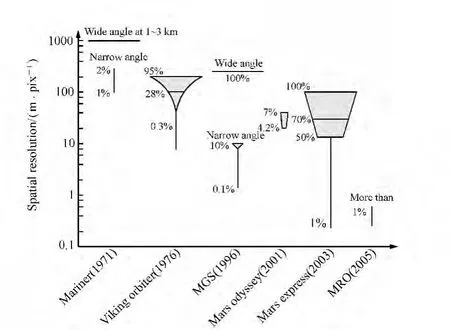
图4 不同分辨率观测对火星表面的覆盖比例Fig.4 Martian surface coverage percentage of different spatial resolutions
3.2 注重可见光观测与近红外谱段观测结合
工作谱段是遥感相机的重要参数之一。工作谱段选择的合适,可以得到信噪比更高、更能反映物体实际情况的图像。上述几个相机工作谱段的红端都至少达到了900~1 000 nm,覆盖了近红外谱段。从目前已掌握资料分析,铁辉石是在火星被探测到的分布最广泛的矿物质,其次还有层状硅酸盐、硫酸盐、橄榄石等矿物质。从这些典型矿物的光谱特性(图5)来看[16],矿物成分主要的高反射率区间基本集中在500~800 nm谱段,而在近红外谱段的反射率差异较为明显。因此,将近红外谱段成像与可见光成像相结合,对于区分不同的地表成分、判读不同地层有着重要意义。

图5 三价铁盐、硫酸盐、页硅酸盐、火成岩的反射谱特征Fig.5 Reflection spectral of ferric secondary minerals,sulfate minerals,phyllosilicate minerals, and primary igneous minerals
3.3 开展火星表面高分辨率三维立体成像
地形地貌特征是火星高分辨率遥感观测的主要目标。而大部分地质学特征,如火山、冲沟、陨石坑等等,在空间中均呈三维分布。对于这些目标,仅通过二维图像,难以得到垂直方向特征的精确数据。因此,近些年国外的火星遥感相机都具备了三维立体成像功能。HRSC的立体成像功能是通过多线阵CCD探测器实现的[5],而HiRISE焦面的全色通道则是单线阵的,必须通过平台姿态的调整实现三维立体成像[7]。
4 不同科学应用目标对遥感观测分辨率的需求探讨
分辨率是光学遥感器最为重要的技术指标,本节从科学和应用的角度出发,探讨不同观测目标对遥感探测分辨率的需求。
4.1 火星表面岩石的精细观测
岩石是火星地质构造的基本单元,对岩石的观测是研究火星地质构造及其演化的重要手段。通过对岩石成分、体积和形状的探测,可以了解岩石的成因,推测相应发生的地质作用。例如,风蚀作用形成的岩石一般棱角突出,河流沉积作用形成的岩石往往磨圆度较好。因此,通过可见光遥感,不仅需要能够发现和识别这些岩石,还需要对其形状进行判别。
根据以往分析和判读的经验,一般来说,如果要识别一个物体,至少应将其成像在3×3的9个像元上;如果要准确地给出物体的形状,那么物体在单个方向上至少要占据5~10个像元。以往的火星探测数据表明,火星表面散布的岩石大小一般在1~5 m量级。因此,对火星表面岩石的精细观测需要遥感相机达到0.1~0.2 m的分辨率。目前国际上分辨率最高的是美国的HiRISE相机,其在近火点的分辨率可达到0.25 m,能够精确判定2 m左右大小的岩石形状,已经非常接近科学观测的最高要求。因此,可以相信,随着运载能力和数据传输能力的提高,在未来实现0.1 m超高分辨率对火观测是完全有可能的。
4.2 陨石坑
陨石坑是火星表面分布最广泛、也是最重要的地貌特征之一。目前主要的研究热点集中在直径1 km以下的小型陨石坑[17]。然而,小型陨石坑比较容易被沙砾所掩盖,或在风蚀作用中被磨平;另外,小型陨石坑往往难以区分是初级陨石坑还是次级陨石坑。因此,必须通过分辨率较高的遥感观测,才能对小型陨石坑做出准确的判断。根据SRC相机的图片来看,2 m左右的分辨率已经可以完成发现、识别小型陨石坑,并能区分初级陨石坑和次级陨石坑[4]。然而事实上,根据“机遇”号的观测,火星表面上的撞击坑最小甚至可以达到0.1 m[7]。通过轨道器上的可见光遥感载荷,几乎不可能发现如此之小的目标。因此,对于撞击坑的研究,难以给出明确的分辨率要求。但可以肯定的是,分辨率越高,发现和辨别的能力也会更强,统计就会越精确。
4.3 风成地貌
风的地质作用在火星非两极区域广泛存在,是在现阶段火星表面最为活跃的地质作用。风蚀作用主要发生在距离火星表面0.3 m高度以下,因此,其形成的某些地貌特征在高度方向不够明显,在分辨率较低的观测中就容易被忽视。图6是MOC窄视场相机拍摄的火山口附近图像。图像中,火山口周围区域地表较为平整,很容易推断出这是由于岩浆大面积流淌造成的。但是,根据“机遇”号巡视器的近距离观测,这一区域的表面存在着大量的风蚀作用痕迹,而这些痕迹在MOC相机拍摄的图像中由于分辨率原因并没有清晰的体现,因而得出了错误的结论[7]。事实上,风蚀作用形成的地貌,其特征尺度大小不一。根据HiRISE相机的图片来看,火星表面存在着尺度在1 m左右的风蚀谷和雅丹地貌[17]。为了能够发现和识别这些尺度较小的地貌特征,遥感相机的分辨率至少应该在0.3~0.5 m。而沙丘、沙堆等风积地貌的尺度相对较大,往往在10 m量级,对其坡度、高度等参数的测量需要遥感相机的分辨率在2 m左右即可。
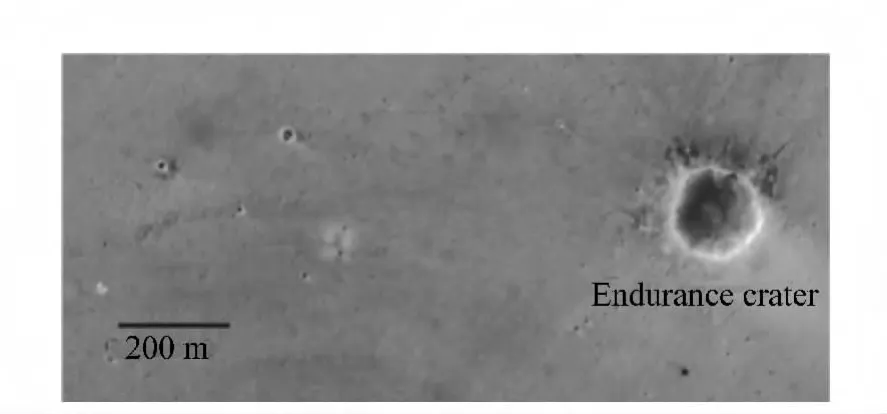
图6 MOC窄视场相机拍摄的火山口附近的图像Fig.6 Image of the nearby region of a volcano crater,taken by MOC narrow-angle camera
4.4 火星着陆器的着陆点选择与巡视路径规划
火星着陆器的移动能力往往十分有限,所以着陆点的选择就显得尤为重要。除了要考虑科学探测的因素外,安全因素也是不可忽视的。火星表面广泛分布着直径1~5 m的岩石,如果着陆器直接降落在岩石上会造成严重的损坏,即使没有直接落到岩石上,如果着陆器落到一个充满障碍的地区,也将极大限制火星巡视车的巡视范围和巡视效率。因此,通过可见光遥感相机对目标降落区域进行高分辨率成像,规划并确认最佳着陆点,是避免这一问题的有效手段。图7为HiRISE拍摄的不同地形区域图像(像元分辨率约0.3 m),(a)图中可以清楚地发现众多1~5 m大小的巨砾,很显然这个地区不能作为着陆点,不但着陆风险高而且寸步难行;而(b)图则好得多,是着陆点的较好选择[6]。鉴于以上分析,光学遥感器必须能够在低轨发现1m量级以上的粗砾级的岩石,其地面像元分辨率应在0.3~0.5 m,以便为火星着陆器着陆点的选择和巡视器巡视路径的规划提供可靠的指导依据。
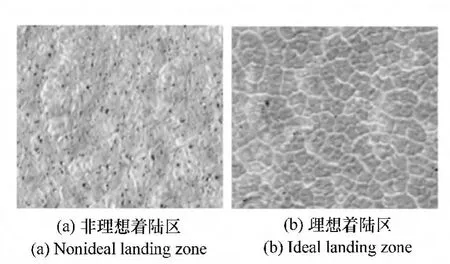
图7 HiRISE拍摄不同地形区域Fig.7 Different morphologic regions taken by HiRISE camera
综合以上4个小节的内容不难看出,当前火星研究中的大部分热点问题都需要光学遥感器的像元分辨率达1 m以下。因此,在未来,开展对火星表面的亚米级分辨率精细观测,是科学研究的迫切需求,也是火星光学遥感器的主要发展方向。
5 结束语
可见光遥感观测可以获得火星表面地形地貌特征的直观图像数据,并可以为火星着陆器寻找和确认最佳着陆点,是火星探测的重要手段之一。本文简要介绍了美国的MOC、HiRISE,以及欧空局的HRSC等几个火星遥感相机的发展概况,并探讨了火星表面岩石、陨石坑、风成地貌、着陆点精细观测等科学应用目标对成像分辨率的需求。通过对国外情况的调研和对科学应用需求的分析,指出开展1 m以下分辨率精细观测是今后火星遥感探测的主要发展趋势,同时遥感器也应具备近红外成像和三维立体成像功能,为我国今后开展火星可见光遥感观测提供了指标选择和设计的依据。
[1] BARLOW N G.Mars:An Introduction to its Interior,Surface and Atmosphere[M].Cambridge:Cambridge University Press,2008
[2] 欧阳自远,肖福根.火星探测的主要科学问题[J].航天器环境工程,2011,28(3):205-217.OUYANG Z Y,XIAO F G.Major scientific issues involved in mars exploration[J].Spacecraft Environment Eng.,2011,28(3):205-217.(in Chinese)
[3] MALIN M C,DANIELSON G E,INGERSOLL A P,et al..Mars observer camera[J].J.Geophysical Research,1992,97(E5):7699-7718.
[4] OBERST J,SCHWARZ G,BEHNKE T,et al..The imaging performance of the SRC on mars express[J].Planetary and Space Sci.,2008,56:473-491.
[5] NEUKUM G,JAUMANN R.HRSC:The High Resolution Stereo Camera of Mars Epress[M].ESA Publications Division &ESTEC Noordwijk,Netherlands:17-35.
[6] EBBEN T H,BERGSTROM J,SPUHLER P,et al..Mission to mars:the HiRISE camera on-board MRO[J].Proceeding of SPIE,2007,6690(66900B):1-22.
[7] MCEWEN A S,ELIASON E M,BERGSTROM J W,et al..Mars reconnaissance Orbiter's High Resolution Imaging Science Experiment(HiRISE)[J].J.Geophysical Res.,2007,112,E05S02.
[8] MALIN M C,BELL J F,CANTOR B A,et al..Context camera investigation on board the mars reconnaissance orbiter[J].J.Geophysical Res.,2007,112,E05S04.
[9] 董吉洪,王克军,李延春,等.空间遥感器中大口径SiC主镜的轻量化设计[J].中国光学,2011,4(2):118-123.
DONG J H,WANG K J,LI Y CH,et al..Lightweight design of large-aperture SiC primary mirrors for space remote sensors[J].Chinese Optics,2011,4(2):118-123.(in Chinese)
[10] 郭疆,邵明东,王国良,等.空间遥感相机碳纤维机身结构设计[J].光学 精密工程,2012,(3):571-578.GUO J,SHAO M D,WANG G L,et al.Design of optical- mechanical structure made of CFC in space remote sensing camera[J].Opt.Precision Eng.,2012,(3):571-578.(in Chinese)
[11] 杨献伟,吴清文,李书胜,等.空间光学遥感器热设计[J].中国光学,2011,4(2):139-146.
YANG X W,WU Q W,LI SH SH,et al..Thermal design of space optical remote sensor[J].Chinese Optics,2011,4(2):139-146.(in Chinese)
[12] 吕恒毅,刘杨,薛旭成,等.遥感图像星上背景扣除和灰度拉伸方案与实验[J].液晶与显示,2012,(2):235-239.
LV H Y,LIU Y,XUE X CH,et al..Methods and experiments of background subtraction and grayscale stretch for remote sensing images[J].Chinese J.Liquid Crystals and Displays,2012,(2):235-239.(in Chinese)
[13] 徐芳,刘晶红,王宣.基于标定的CCD图像畸变校正方法研究[J].液晶与显示,2013,28(4):633-640.
XU F,LIU J H,WANG X.Distortion correction method for CCD image based on calibration[J].Chinese J.Liquid Crystals and Displays,2013,28(4):633-640.(in Chinese)
[14] 余达,龙科慧,徐东,等.多路高速短消隐期线阵CCD图像数据存储设计[J].液晶与显示,2013,28(2):284-289.
YU D,LONG K H,XU D,et al..Design of Mult-channel high-speed and short blanking period linear CCD image data storage[J].Chinese J.Liquid Crystals and Displays,2013,28(2):284-289.(in Chinese)
[15] 李云飞,赵运隆.TDICCD相机成像系统地面检测设备设计[J].液晶与显示,2012,27(6):842-846.
LI Y F,ZHAO Y L.Design of ground test equipment for TDICCD camera imaging system[J].Chinese J.Liquid Crystals and Displays,2012,27(6):842 - 846.(in Chinese)
[16] MURCHIE S,ARVIDSON R,BEDINI P,et al..Compact Reconnaissance Imaging Spectrometer for Mars(CRISM)on Mars Reconnaissance Orbiter(MRO)[J].J.Geophysical Res.,2007,112,E05S03.
[17] MCEWEN,HANSEN C,BRIDGES N,et al.MRO's High Resolution Imaging Science Experiment(HiRISE):Science Expectations[C].Sixth International Conference on Mars,Pasadena,U.S.of America,2003:No.3217.
猜你喜欢
英语世界(2022年5期)2022-05-18
空间科学学报(2021年2期)2021-07-21
小天使·四年级语数英综合(2020年10期)2020-12-16
雷达学报(2020年3期)2020-07-13
文萃报·周五版(2020年15期)2020-04-22
阅读与作文(小学高年级版)(2020年3期)2020-03-02
太空探索(2015年8期)2015-07-18
浙江大学学报(工学版)(2015年1期)2015-03-01
航天返回与遥感(2014年4期)2014-07-31
航天器工程(2014年4期)2014-03-11
