
基于二阶广义积分器-锁频环的异步电机同步角频率估计方法
2014-06-22 02:56赵仁德郭宝玲
电工技术学报 2014年1期
辛 振 赵仁德 郭宝玲 马 帅
(1.中国石油大学(华东)信息与控制工程学院 青岛 266580 2.国家电网山东省电力公司莱芜供电公司 莱芜 271100)
1 引言
在异步电机矢量控制和直接转矩控制中,电压模型磁链观测器因其具有算法简单、对异步电机参数依赖小、不需要转速信息等优点,得到了广泛的应用。电压模型中的纯积分环节存在积分漂移和积分初值误差问题,通常使用滤波器代替纯积分来解决。但是直接使用滤波器代替纯积分会产生幅相误差,一般通过增加动态补偿环节或者通过动态调节滤波器的截止频率来消除,两类方法均需使用异步电机同步角频率[1-12]。
文献[1]使用低通滤波器(Low-Pass Filter,LPF)代替纯积分、文献[2-5]使用可编程LPF代替纯积分、文献[6,7]使用层叠式可编程LPF代替纯积分,以上方案均使用动态补偿环节(或校正环节)消除幅相误差,动态补偿环节的实现需要使用异步电机同步角频率。文献[8]使用高通滤波器(High-Pass Filter,HPF)和坐标变换环节代替纯积分、文献[9,10]使用LPF串联HPF代替纯积分、文献[11]使用五阶LPF串联HPF代替纯积分,以上方案都需要根据异步电机同步角频率实时调整滤波器的截止频率以保证磁链观测的精度。可以看出,同步角频率的准确估计对于传统的采用滤波器代替纯积分的磁链观测方案性能的提高具有重要意义。
传统同步角频率的估计方法主要有反电动势法、锁相环(Phase Locked Loop,PLL)法[2]、定子磁链法[3-6]等。反电动势法和 PLL法均需使用三角函数或反三角函数,计算量大;采用定子磁链法求解同步角频率需要用到定子磁链,而求解定子磁链时又需用到同步角频率,两者的计算误差相互影响以致恶化[12]。
二阶广义积分器-锁频环(Second Order Generalized Integrator-Frequency Locked Loop,SOGIFLL)[13-15]算法在电网电压同步信号的提取中得到了广泛的应用。电网电压信号的幅值、频率变化较小,但是,异步电机运行过程中,反电动势信号的幅值、频率变化范围很大。本文深入分析了将SOGIFLL直接用于反电动势信号频率的估计时,频率估计受反电动势幅值、频率变化的影响。在此基础上,研究了使用具有幅值频率自适应性的SOGI-FLL估计异步电机同步角频率的方法,仿真和实验结果表明,使用具有幅值频率自适应性的SOGI-FLL估计异步电机同步角频率可使估计速度不受反电动势信号幅值、频率变化的影响,将该方法应用于磁链观测动态补偿,有效提高了磁链观测的精度。
2 SOGI-FLL测频原理及其频率响应特性
2.1 SOGI-FLL的测频原理
图1为SOGI-FLL结构框图,其主要由SOGIQSG和FLL两部分组成。对于给定的正弦输入信号v= V sin(ω t+ φ ),图1中 v′为输入信号的估计值,qv′为 v′的正交值,εv为估计误差,ω′为 FLL 估计出的输入信号频率。

图1 SOGI-FLL结构框图Fig.1 Structure of SOGI-FLL
SOGI-QSG中的估计误差εv和正交输出qv′的乘积εf作为FLL模块的输入,当正弦输入信号v的频率小于 FLL 输出频率时(ω<ω′),qv′和εv同相位,εf>0;当输入信号的频率大于 FLL输出频率时(ω>ω′),qv′和εv相位相反,εf<0;当ω =ω′时,εf=0。FLL 中具有负增益-γ 的积分器根据εf的变化,逐渐调整输出频率ω′,最终使ω′= ω。
2.2 SOGI-FLL的频率响应特性
图1所示SOGI-FLL的状态方程为[14,15]
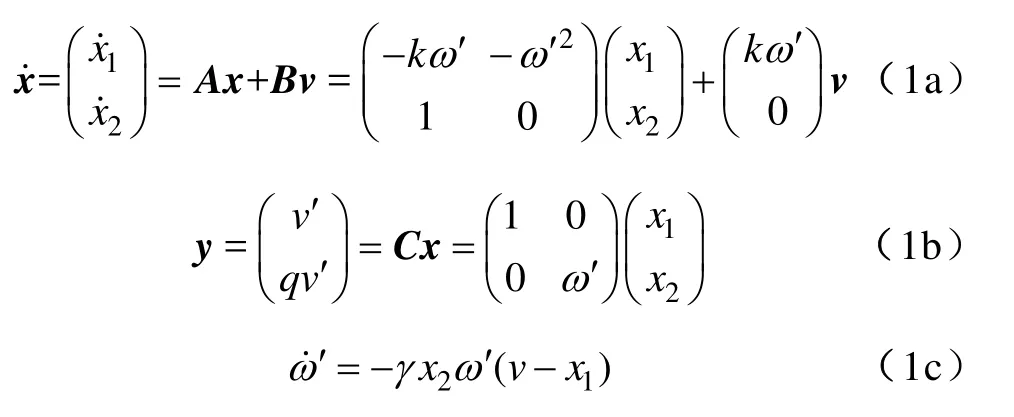
式中,x和y分别是SOGI-QSG的状态变量和输出变量, x = [ x1,x2]T和 y = [v′,q v′]T。
式(1c)描述了FLL的频率响应特性。对于给定的正弦输入信号 v = V sin(ω t+ φ ),稳态时,ω′=0,ω =ω′,输出变量为

估计误差εv的表达式可根据式(1a)得到

式中

结合式(3)和式(4),得出εf的表达式为




定义频率检测响应的时间常数为

由式(9)可知,频率检测响应时间常数τ 与估计出的定子反电动势的频率ω′成正比,与定子反电动势幅值的平方成反比。在异步电机运行过程中,定子反电动势的幅值和频率会在零到额定值间变化,假设运行过程中电机定子反电动势幅值和频率等比例变化,当γ 和 k固定时, τ ∝ ω ′/V2,电机运行在 20Hz时 SOGI-FLL的频率检测响应时间将是40Hz时的2倍。
3 幅值频率自适应SOGI-FLL的结构及频率响应特性
具有幅值频率自适应性的SOGI-FLL可有效消除反电动势幅值、频率变化对电机同步角频率估计结果的影响,其结构如图2所示,本文对其消除幅相误差的原理进行理论分析。

图2 幅值频率自适应SOGI-FLL结构框图Fig.2 Structure of normalized SOGI-FLL
根据图2的结构,可得到与式(1c)对应的状态方程
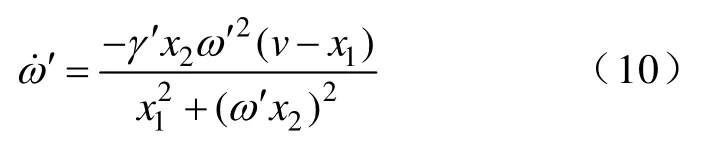
稳态时,可认为ω′≈ω,根据式(2)可知

将式(11)代入式(10)并结合 2.2节的分析方法,可得

将式(7)代入式(12),稳态时ω′≈ω,忽略二倍频的交流成分,具有幅值频率自适应性的SOGI-FLL的平均频率动态响应特性可表示为

频率检测响应的时间常数变为

式(13)描述了具有幅值频率自适应性的SOGIFLL中FLL模块的平均动态性能,增益 Γ ′= γ ′/k 表征了频率检测响应速度,与式(9)增益Γ=γV2(k ω ′)相比,式(14)中的增益Γ′不再与定子反电动势信号的幅值和频率有关,当γ′和k选定时,增益Γ′为常数,此时的FLL模块为一阶线性系统,简化结构如图3所示。
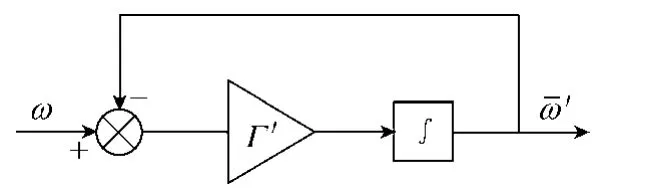
图3 幅值频率自适应FLL的简化结构Fig.3 Simplified structure of normalized FLL
4 仿真分析
为了验证具有幅值频率自适应性的 SOGI-FLL的效果,分别在理想情况下反电动势信号幅值、频率渐变和突变时对SOGI-FLL和具有幅值频率自适应性的SOGI-FLL的同步角频率估计结果进行仿真比较。
反电动势信号幅值、频率渐变时仿真结果如图4所示,图4a为理想反电动势信号,其幅值频率在0.5~1s时为215V、20Hz,1~2s时由215V、20Hz逐渐增至 430V、40Hz,2~2.5s保持 430V、40Hz不变。从图4b可以看出,在0.5~1s和2~2.5s时,反电动势信号幅值、频率稳定,采用SOGI-FLL和具有幅值频率自适应性的SOGI-FLL估计同步角频率稳态跟踪误差都几乎为0。在1~2s,反电动势幅值和频率均不断增大,反电动势幅值和频率越小时,SOGI-FLL的跟踪误差越大,频率响应时间越长,具有幅值频率自适应性的SOGI-FLL在反电动势频率和幅值的变化过程中,同步角频率平均跟踪误差不变。
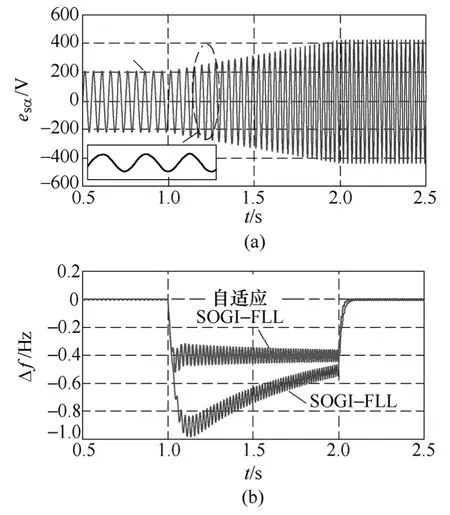
图4 反电动势频率幅值渐变时两种算法频率响应特性对比Fig.4 Comparison of frequency response characteristics between the two algorithms when back-EMF changes gradually
反电动势信号幅值、频率突变时仿真结果如图5所示。图5a为理想反电动势信号,其幅值频率在1s时由 215V、20Hz突变至 430V、40Hz。通过图5b可以看出,具有幅值频率自适应性的SOGI-FLL响应速度快于 SOGI-FLL,这主要是因为在估计同步角频率时,具有幅值频率自适应性的 SOGI-FLL的频率响应特性与SOGI-FLL相比,不再受反电动势信号幅值、频率变化的影响,在反电动势信号幅值、频率变化时也能保证较高的频率检测响应速度。
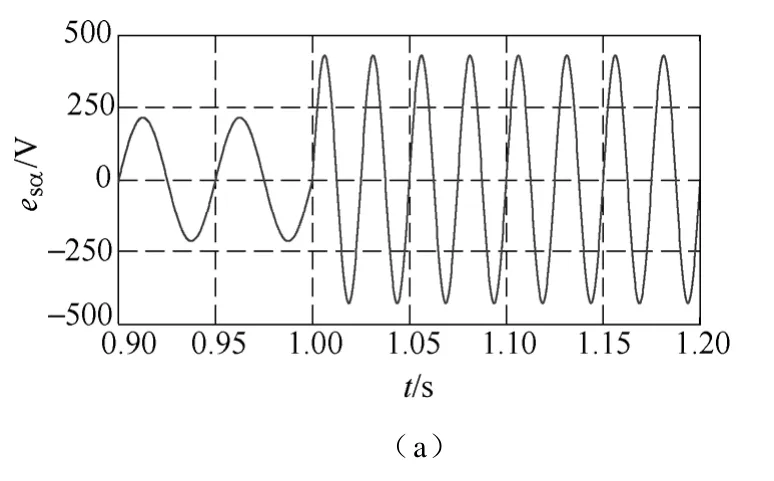

图5 反电动势频率幅值突变时频率响应特性对比Fig.5 Comparison of frequency response characteristics of the two algorithms when back-EMF changes abruptly
5 实验研究
为了验证新方案的有效性,构建了基于异步电机矢量控制的转速电流双闭环调速系统实验平台。控制中采用转子磁链定向,利用文献[10]提出的LPF串联HPF代替纯积分的方案观测定子磁链,原理框图如图6所示。使用具有幅值频率自适应性的SOGIFLL估计出的异步电机同步角频率对其动态补偿以消除幅相误差,再根据式(16)求出转子磁链。控制框图如图7所示,仿真所用异步电机参数见下表。


图6 LPF串联HPF磁链观测动态补偿原理框图Fig.6 Block diagram of the LPF in series of HPF flux observer with a dynamic compensation link

图7 异步电机磁场定向控制框图Fig.7 Field oriented control scheme of induction motor
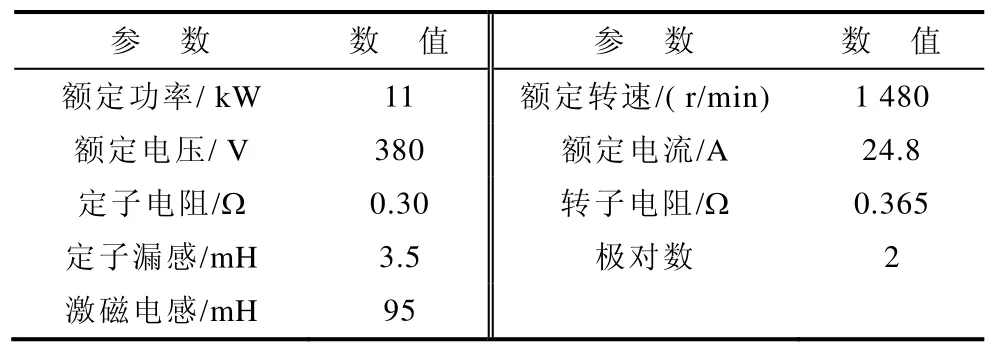
表 异步电机参数Tab.Parameter of the induction motor
5.1 稳态性能实验
同步角频率的估计精度决定了动态补偿环节能否准确补偿使用滤波器代替纯积分引起的幅相误差,因此可通过对比观测的定子磁链与实际磁链的幅相误差来判断使用具有幅值频率自适应性的SOGI-FLL估计出的同步角频率是否准确。由于实际控制系统中无法直接得到真实的磁链与观测结果进行对比,而理论上定子反电动势 β 分量esβ应与定子磁链 α 分量ψsα同相位,因此通过对比 esβ与ψsα的相位来判断磁链观测的准确性。图8a和图8b分别是电机转速指令为300r/min和1 200r/min、负载转矩为 10N·m时 esβ与ψsα的波形,可以看出,在转速分别为 300r/min和 1 200r/min时,esβ与ψsα的相位差都几乎为 0,这说明动态补偿环节准确地补偿了LPF串联HPF代替纯积分所引起的幅相误差,而实验中LPF和HPF的截止频率为同步角频率的固定倍数[10],同步角频率的精度唯一决定了补偿的精度。因此证明了具有幅值频率自适应性的SOGI-FLL估计出的同步角频率是准确的。
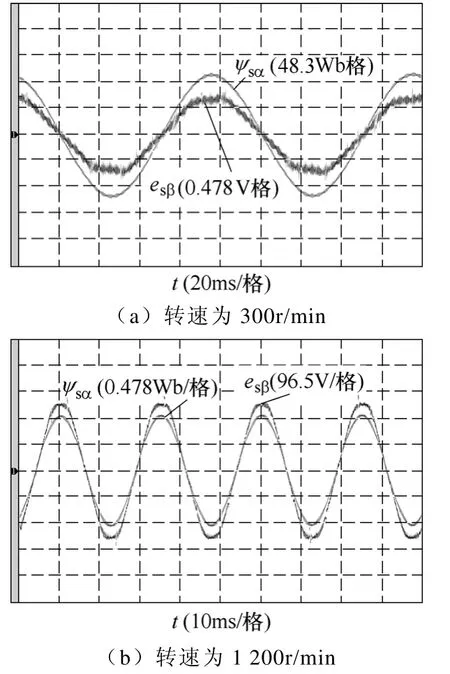
图8 不同转速下定子磁链与反电动势波形Fig.8 The waveforms of stator flux-linkage and back-EMF at different speeds
图9a和图9c分别为异步电机转速为300r/min和1 200r/min、负载转矩为10N·m时电机转速、同步角频率、转子磁链波形,图9b和图9d为对应的转子磁链圆波形。从图9中可以看出,稳态时,在不同转速下具有幅值频率自适应性的SOGI-FLL估计出的同步角频率都几乎没有波动,将其用于LPF串联HPF的磁链观测方案中,通过式(16)求得的转子磁链波形稳定,其幅值大小与给定值 0.96Wb基本一致,电机转速分别与给定值 300r/min和1 200r/min一致,电机运行状态良好。
图9 不同转速下转速、同步角频率和转子磁链波形Fig.9 The waveforms of the speed,synchronous angular frequency and rotor flux-linkage at different speeds
5.2 动态性能实验
图10为转速指令从300r/min突变至1 200r/min,负载转矩为10N·m时,电机转速、同步角频率、转子磁链波形,从图10中可以看出,转速突变时使用具有幅值频率自适应性的SOGI-FLL估计出的同步角频率变化过程较为平稳,所求得的电机转子磁链在转速突变时仍能保持较为稳定的波形,电机转速经过微小的超调后最终稳定运行于 1 200r/min,控制准确。
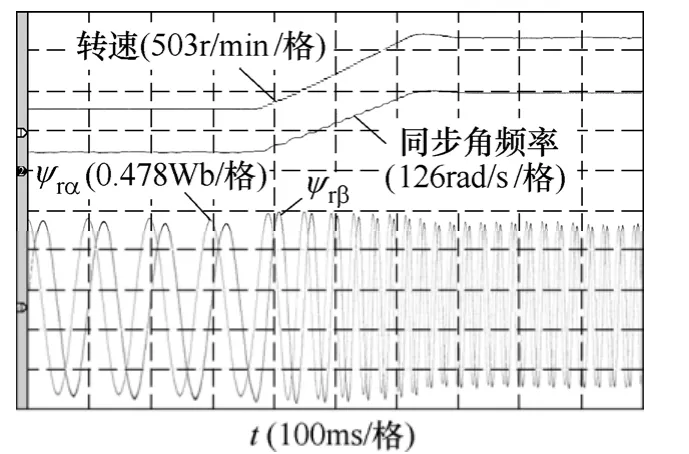
图10 转速指令从300r/min突变至1 200r/min时转速、同步角频率和转子磁链波形Fig.10 The waveforms of the speed,synchronous angular frequency and rotor flux-linkage during speed stepping from 300r/min to 1200r/min
图11为转速指令从300r/min突变至1 200r/min,负载转矩为10N·m时,SOGI-FLL与具有幅值频率自适应性的SOGI-FLL估计同步角频率的动态过程对比。由实验结果可知,电机转速动态变化过程中,低速时SOGI-FLL的频率检测响应速度明显慢于具有幅值频率自适应性的 SOGI-FLL,随着转速的升高,两者差距逐渐减小。电机转速从300r/min变为1 200r/min时,定子反电动势由 123.63V、9.75Hz升高至509.52V、40.10Hz,幅值扩大了4.12倍,频率扩大了4.11倍,结合图11所示的定子反电动势动态变化过程,可近似认为在转速突变过程中,定子反电动势幅值和频率等比例变化,根据式(9)和式(14)可知,定子反电动势幅值和频率越低时,SOGI-FLL频率检测响应越慢,而具有幅值频率自适应性的SOGI-FLL频率检测响应不受定子反电动势幅值和频率变化的影响。实验结果与理论分析和仿真分析一致。

图11 转速指令从300r/min突变至1 200r/min时转速、同步角频率和定子反电动势波形Fig.11 The waveforms of the speed,synchronous angular frequency and back-EMF during speed stepping from 300r/min to 1 200r/min
图12为转矩指令从 10N·m跃升至 60N·m,转速指令为750r/min时具有幅值频率自适应性的SOGIFLL估计出的电机同步角频率、电磁转矩、转子磁链波形,从图中可以看出,转矩指令跃升50N·m时,同步角频率约有5rad/s的上升,系统动态调节过程中,具有幅值频率自适应性的SOGI- FLL估计出的同步角频率能较快跟踪负载的变化,将其用于 LPF串联 HPF的磁链观测方案中,并结合式(25)求得的转子磁链波形稳定,其幅值大小与给定值0.96Wb基本一致。
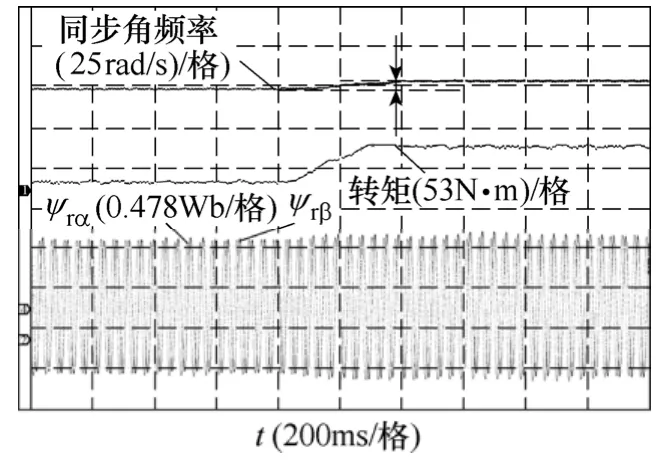
图12 转矩指令从10N·m跃升至60N·m时同步角频率、电磁转矩、转子磁链波形Fig.12 The waveforms of the speed,synchronous angular frequency and rotor flux-linkage during torque stepping from 10N·m to 60N·m
6 结论
本文提出了基于幅值频率自适应SOGI-FLL估计异步电机同步角频率的方法,对其频率响应特性进行了理论分析,仿真和实验验证了其具有算法简单、频率估计响应速度快、估计误差小等优点。将具有幅值频率自适应性的SOGI-FLL估计出的同步角频率应用于LPF串联HPF磁链观测的动态补偿环节,进行了稳态和动态的实验研究,实验结果表明基于幅值频率自适应SOGI-FLL的异步电机同步角频率估计方法可以有效地对磁链观测的结果进行补偿,从而提高磁链观测的精度和整个系统的运行性能。
[1] 文晓燕,郑琼林,韦克康,等.带零漂补偿和定子电阻自校正的磁链观测器[J].中国电机工程学报,2011,31(12): 102-107.Wen Xiaoyan,Zheng Qionglin,Wei Kekang,et al.Flux observer with offset compensation and stator resistance self-correction[J].Proceedings of the CSEE,2011,31(12): 102-107.
[2] Comanescu M,Xu L.An improved flux observer based on PLL frequency estimator for sensorless vector control of induction motors[J].IEEE Transactions on Industrial Electronics,2006,53(1): 50-56.
[3] Myoung Ho Shin,Dong Seok Hyun,Soon Bong Cho,et al.An improved stator flux estimation for speed sensorless stator flux orientation control of induction motors[J].IEEE Transactions on Power Electronics,2000,15(2): 312-318.
[4] Sang Soo Lee,Jae Hoon Kim,Dong Seok Hyun.Programmable LPF-based stator flux estimator for sensorless induction motor control[C].Vehicle Power and Propulsion Conference,Seoul,Korea,2012.
[5] 王高林,陈伟,杨荣峰,等.无速度传感器感应电机改进转子磁链观测器[J].电机与控制学报,2009,13(5): 638-642.Wang Gaolin,Chen Wei,Yang Rongfeng,et al.Improved rotor flux estimator for sensorless induction motor[J].Electric Machines and Control,2009,13(5):638-642.
[6] Bose B K,Patel N R.A programmable cascaded low-pass filter-based flux synthesis for a stator flux-oriented vector-controlled induction motor drive[J].IEEE Transactions on Industrial Electronics,1997,44(1): 140-143.
[7] Karanayil B,Rahman M F,Grantham C.An implementation of a programmable cascaded low-pass filter for a rotor flux synthesizer for an induction motor drive[J].IEEE Transactions on Power Electronics,2004,19(2): 257-263.
[8] 王宇,邓智泉,王晓琳.一种新颖的电机磁链辨识算法[J].中国电机工程学报,2007,27(6): 39-43.Wang Yu,Deng Zhiquan,Wang Xiaolin.A novel algorithm of motor flux estimation[J].Proceedings of the CSEE,2007,27(6): 39-43.
[9] 孙大南,林文立,刁立军,等.改进型感应电机电压模型磁链观测器设计[J].北京交通大学学报,2011,35(2): 94-98.Sun Danan,Lin Wenli,Diao Lijun,et al.Improved voltage model flux observer design of induction machine[J].Journal of Beijing Jiaotong University,2011,35(2): 94-98.
[10] 张星,瞿文龙,陆海峰.一种能消除直流偏置和稳态误差的电压型磁链观测器[J].电工电能新技术,2006,25(1): 39-43.Zhang Xing,Qu Wenlong,Lu Haifeng.Method for elimination of DC offset and steady state error for voltage module flux observer[J].Advanced Technology of Electrical Engineering & Energy,2006,25(1): 39-43.
[11] Wang Yu,Deng Zhiquan.An integration algorithm for stator flux estimation of a direct-torque-controlled electrical excitation flux-switching generator[J].IEEE Transactions on Energy Conversion,2012,27(2):411-420.
[12] 何志明.基于新型定子磁链观测器的无传感器直接转矩控制系统研究[D].重庆: 重庆大学,2009.
[13] Rodriguez P,Luna A,Ciobotaru M,et al.Advanced grid synchronization system for power converters under unbalanced and distorted operating conditions[C].IECON 32nd Annual Conference of IEEE,Paris,2006: 5173-5178.
[14] Rodriguez P,Luna A,Candela I,et al.Multiresonant frequency-locked loop for grid synchronization of power converters under distorted grid conditions[J].IEEE Transactions on Industrial Electronics,2011,58(1): 127-138.
[15] Rodriguez P,Luna A,Candela I,et al.Grid synchronization of power converters using multiple second order generalized integrators[C].IECON 2008-34th Annual Conference of IEEE,Orlando FL,2008:755-760.
猜你喜欢
微电机(2022年8期)2022-10-12
微特电机(2021年11期)2021-11-16
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
郑州大学学报(工学版)(2020年2期)2020-06-16
广东电力(2020年1期)2020-03-03
汽车电器(2019年2期)2019-03-22
物理教学探讨(2018年9期)2018-12-27
魅力中国(2016年50期)2017-08-11
组合机床与自动化加工技术(2014年10期)2014-03-01
