LMCCD相机影像摄影测量首次实践
2014-06-27 05:47王任享王建荣
测绘学报 2014年3期
王任享,王建荣,胡 莘
1.地理信息工程国家重点实验室,陕西西安 710054;2.西安测绘研究所,陕西西安 710054
LMCCD相机影像摄影测量首次实践
王任享1,2,王建荣1,2,胡 莘1,2
1.地理信息工程国家重点实验室,陕西西安 710054;2.西安测绘研究所,陕西西安 710054
LMCCD相机作为天绘一号卫星的有效载荷,是保证其实现无地面控制点摄影测量精度的关键。本文分别利用LMCCD影像和三线阵CCD影像对天绘一号卫星的相机参数进行在轨标定计算,并利用各组在轨标定结果对定位精度(重点对高程误差)进行统计分析。试验结果表明:与单纯的三线阵CCD影像相比,LMCCD影像在相机参数在轨标定中能有效抵御因卫星姿态变化率导致的光束法平差航线系统变形问题,在天绘一号现有姿态变化率的水平条件下,利用LMCCD影像进行相机参数在轨标定可保证天绘一号01星实现无地面控制点摄影测量精度要求。
卫星摄影测量;三线阵CCD影像;LMCCD相机;空中三角测量
1 前 言
三线阵CCD相机推扫摄影影像受卫星姿态变化率的影响,其影像的光束法平差航线模型存在系统变形,主要在高程方向呈波浪变化[1-2],给以光束法平差途径实现无地面控制点卫星摄影测量造成困境。2003年笔者在等效框幅相片(简称“EFP”)光束法平差基础上提出的LMCCD相机(line-matrix CCD camera,简称LMCCD相机)设计思想[3],可以解决因卫星姿态变化率导致的光束法平差航线系统变形问题。中国科学院长春光机所有关专家对LMCCD相机设计思想从工程可行性进行分析,并付诸实践[4]。LMCCD相机的提出,有力地支持了天绘一号卫星工程的立项[5]。天绘一号01星2010年8月入轨,至今已运行将近3年,运行状态良好,实现了其无地面控制点摄影测量的精度目标[6],其中LMCCD相机为该工程目标的实现作出了重要贡献。两年多来,笔者持续利用LMCCD影像和三线阵CCD影像进行相机参数在轨标定的试验折研究,分析了两者在高程方面的误差特性,得出作为无地面控制点卫星摄影测量,卫星姿态变化率对相机参数在轨标定的影响不可忽视,LMCCD影像在相机参数在轨标定中抵御卫星姿态变化率方面优越于传统的三线阵CCD影像。
2 LMCCD相机配置及其影像
LMCCD相机是在三线阵CCD相机基础上增加4个小面阵相机,如图1所示,即线阵-面阵CCD混合配置相机,4个小面阵影像坐标属于该定向时刻的真框幅坐标,是LMCCD影像的最重要特征。

图1 LMCCD相机探测器配置Fig.1 Arrangement of the sensors in LMCCD camera
2003年笔者在学术思想研究初期进行LMCCD相机推扫摄影模拟[7],模拟生成前视、正视、后视影像及对应时刻的小面阵影像,如图2所示。
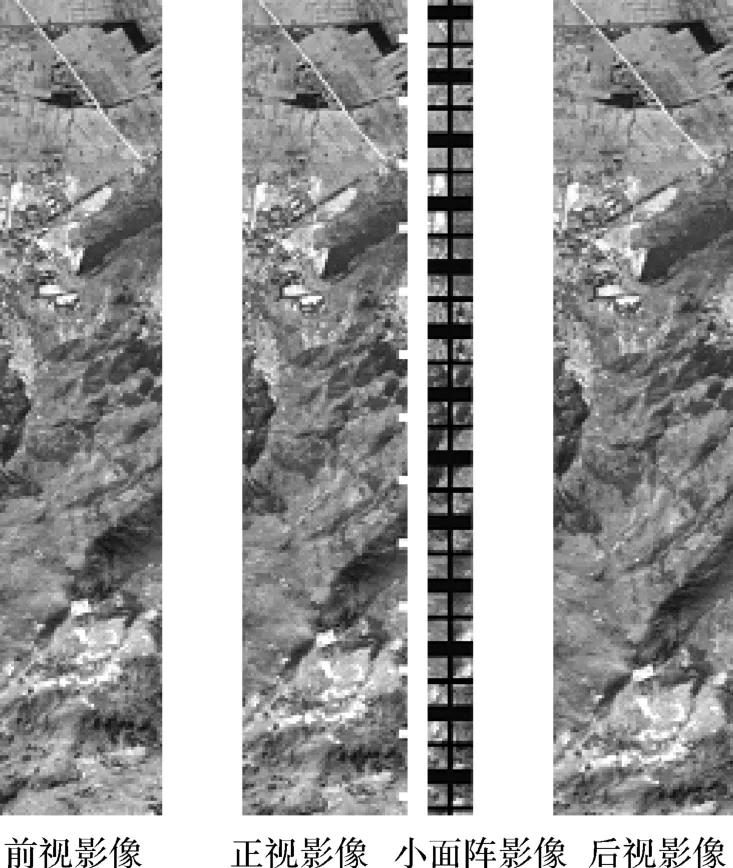
图2 模拟生成的LMCCD影像Fig.2 LMCCD image of simulation
2010年成功发射的天绘一号卫星,首次进行了LMCCD相机的卫星影像摄取,如图3所示,由于篇幅有限,本文只显示正视影像及小面阵影像,正视影像两侧的小面阵影像是以连结点的CCD同名点影像为中心从640像素×480像素大小的小面阵影像中截取的窗口影像。天绘一号卫星工程中LMCCD相机在摄影时,小面阵相机只是在EFP时刻才获取影像,与三线阵CCD影像分开记录,便于后期处理。

图3 天绘一号卫星LMCCD影像Fig.3 LMCCD image of TH-1 satellite
3 LMCCD影像用于相机参数在轨标定
笔者在文献[8]中指出,相机参数在轨标定的数学模型要具有框幅相机性质的严格数学模型,反解空中三角测量的光束法平差航线模型没有因卫星姿态变化率造成的系统变形,方能达到相机参数精确的在轨标定,否则相机标定结果将有损高程6 m精度的实现。
框幅式相机采取60%的重叠摄影[9],相邻相片间有固定的连结,进行空中三角测量平差航线模型不带有卫星姿态变化率造成的系统变形。线阵CCD推扫摄影,相邻线阵影像间缺乏固定的连结,因而不可能进行经典的光束区域平差[10]。笔者曾提出EFP光束法平差处理三线阵CCD影像[11],期望能像框幅相片那样,航线模型没有卫星姿态变化率造成的系统误差,但未能达到较好的效果,究其根本原因是相邻定向时刻(或EFP时刻)间缺乏固定的连结。对此提出LMCCD相机的设计思想,从卫星三线阵CCD影像数据获取的源头入手,在相邻定向时刻(或EFP时刻)影像间增加以真框幅像片特征的连结点像坐标(由小面阵影像量测),如图4中在110和111之间增加连结点,使得相邻定向时刻有固定连结,解决了平差航线的系统变形。从EFP空中三角测量角度讲,4个小面阵真框幅坐标的连结点从本质上改变了推扫摄影相邻定向时刻影像间缺乏固定的连结的状态。
平差采用的等效框幅像片像点分布示于图5,图中白圆点是EFP时刻摄影的三线阵CCD影像,黑圆点是连结点,其中T120、T121、T320、T321是由小面阵CCD相机摄取的真框幅坐标,其余点属于推算而得的等效框幅坐标,按经典的空中三角测量数学模型进行严格的光束法平差。经模拟仿真计算,其效果与框幅相片空中三角测量相同,使航线模型不带有因卫星姿态变化率造成的系统变形。因此, LMCCD影像光束法平差就成为天绘一号卫星相机参数在轨标定的数学模型和理论基础。

图4 正视影像上选取的定向点及连结点Fig.4 Orientation point and connected point selected in vertical-image

图5 EFP像片上生成的定向点、连结点Fig.5 Orientation point and connected point in the EFP image
4 相机参数在轨标定中地面点高程误差
LMCCD影像作反解空中三角测量中,由于航线模型不带有卫星姿态变化率造成的系统变形,原则上绝对定向只要7个未知数,所以在轨标定的光束法平差共有18个独立待解参数。按数学原理,有6个适当分布的地面控制点便得可行解,但从标定结果可靠性考虑,控制点增加为60个。利用不同数量控制点、LMCCD影像与三线阵CCD影像分别进行不同组合标定,并分析标定结果对高程误差的影响。
4.1 不同数量控制点在轨标定后定位误差试验
利用天绘一号01星在2011年10月7日获取的LMCCD影像、精密定轨定姿及地面控制点数据,利用60个和6个地面控制点分别进行LMCCD影像和三线阵CCD影像的相机参数在轨标定,并对在轨标定结果和实验室标定结果进行定位精度统计,其结果列于表1所示,60个控制点参与在轨标定后高程误差分布示于图6—图8,6个控制点参与在轨标定后高程误差分布示于图9—图10。

表1 高程误差统计Tab.1 Statistics of height errors

图6 实验室标定参数前方交会高程误差分布Fig.6 Distribution of height errors by forward intersection using Lab calibration parameters

图7 60个控制点参与LMCCD影像标定平差后高程误差分布Fig.7 Distribution of height errors after calibrationadjustment using LMCCD image with 60 ground control points

图8 60个控制点参与三线阵CCD影像标定平差后高程误差分布Fig.8 Distribution of height errors after calibrationadjustment using CCD image with 60 ground control points

图9 6个控制点参与LMCCD影像标定平差后高程误差分布Fig.9 Distribution of height errors after calibration-adjustment using LMCCD image with 6 ground control points

图10 6个控制点参与三线阵CCD影像标定平差后高程误差分布Fig.10 Distribution of height errors after calibration-adjustment using CCD image with 6 ground control points
从表1和图6—图10可以看出:
(1)与三线阵CCD影像相比,利用LMCCD影像进行标定能有效改善高程方向上的精度。
(2)6个控制点参与标定情况下,利用LMCCD和三线阵CCD影像进行标定都是可行的,但高程方向仍有较大误差,三线阵CCD影像标定后误差尤为明显。
4.2 相机参数多次在轨标定误差统计
自天绘一号01星2010年8月入轨至2013年3月,利用东北地面试验场共进行8次相机参数标定,笔者利用其数据分别进行LMCCD影像和三线阵CCD影像相机参数标定光束法平差计算,并分别统计其高程误差(相机参数标定光束法平差计算的高程与控制点实验场采集高程的较差)列于表2。
从表2可以看出:
(1)60个控制点参与标定情况下,LMCCD影像高程误差大多数优于6 m,而三线阵CCD影像高程误差要比LMCCD影像高程误差大2.5~3倍。
(2)6个控制点参与标定情况下,LMCCD影像标定尚可满足可行解,而三线阵CCD影像标定误差过大,不满足可行解。
(3)LMCCD影像和三线阵CCD影像光束法平差应用的原理及数学模型完全相同, LMCCD影像平差时仅仅将每排的上下连结点CCD影像推算的“等效框幅”坐标代之以小面阵影像推算的真框幅相片坐标,按文献[5]第五章的分析,可以得出三线阵CCD影像平差比LMCCD影像平差高程误差大的原因是天绘一号01星姿态变化率存在不可忽视的量值。利用LMCCD影像进行相机地面标定是天绘01星实现无地面控制点目标定位高程精度6 m的重要环节。

表2 标定结果对高程误差统计Tab.2 Statistics of height errors with calibration result
5 结 论
LMCCD小面阵影像为EFP法平差连结点提供了其真框幅相片坐标,使得EFP平差成为具有框幅相片性能的空中三角测量,有效地抵御了卫星姿态变化率对平差结果的影响,依此反解空中三角测量进行相机在轨标定的结果,明显优于单纯只有三线阵CCD影像。天绘一号01星工程中利用LMCCD影像进行相机参数在轨标定后,经多功能EFP光束法平差后无地面控制点条件下定位精度中误差达到10.3 m/5.7 m(平面/高程1σ),实现工程指标[13-14]。
实际工程实践中,卫星姿态变化率对平差的影响难以把握,无地面控制点卫星摄影测量工程的相机参数在轨标定选用LMCCD相机影像是一个重要选项。
[1] EBNER H,KORNUS W,KORNUS T,et al.Orientation of MOMS-02/D2 and MOMS-2P/Priroda Imagery[J].ISPRS Journal of photogrammetry and Remote Sensing,1999, 54:332-341.
[2] JACOBEN K.Geometric Modeling of Linear CCDs and Panoramic Images Advances in Photogrammetry[C]∥Remote Sensing and Spatial Information Sciences.London:Taylor&Francis,2008:145-155.
[3] WANG Renxiang,HU Xin,YANG Junfeng,et al.Proposal LMCCD Camera for Satellite Photogrammetry[J].Acta Geodaetica et Cartographica Sinica,2004,33(2):116-120.(王任享,胡莘,杨俊峰,等.卫星摄影测量LMCCD摄影机的建议[J].测绘学报,2004,33(2):116-120.)
[4] WANG Zhi,QIAO Ke,ZHANG Liping.Implementation of LMCCD Camera for Stereo Mapping Satellite Using Three-line Array CCDs[J].OME Information,2010,27 (11):110-114.(王智,乔克,张立平.三线阵立体测绘卫星LMCCD相机的实现[J].光机电信息,2010,27(11): 110-114.)
[5] WANG Renxiang.Key Photogrammetric Progress of TH-1 Satellite without Ground Control Points[J].Science of Surveying and Mapping,2013,42(1):1-5.(王任享.天绘一号卫星无地面控制点摄影测量关键历程[J].测绘科学, 2013,42(1):1-5.)
[6] WANG Renxiang,HU Xin,WANG Jianrong.Photogrammetry of Mapping Satellite-1 without Ground Control Points[J].Acta Geodaetica et Cartographica Sinica,2013,42(1):1-5.(王任享,胡莘,王建荣.天绘一号无地面控制点摄影测量[J].测绘学报,2013,42(1):1-5.)
[7] WANG Renxiang,WANG Jianrong,WANG Xinyi,et al.The Satellite Photogrammetric Performance of LMCCD Camera[J].Science of Surveying and Mapping,2004,29 (4):10-12.(王任享,王建荣,王新义,等.LMCCD相机卫星摄影测量的特性[J].测绘科学,2004,29(4):10-12.)
[8] WANG Renxiang,WANG Jianrong,ZH AO Fei,et al.Dynamic Calibrating of Three-line-array CCD Camera in Satellite Photogrammetry Using Ground Control Point [J].Journal of Earth Sciences and Environment,2006,28 (2):1-5.(王任享,王建荣,赵斐,等.利用地面控制点进行卫星摄影三线阵CCD相机的动态检测[J].地球科学与环境学报,2006,28(2):1-5.)
[9] WANG Zhizhuo.Principle of Photogrammetry[M].Beijing: Surveying and Mapping Press,1990.(王之卓.摄影测量原理[M].北京:测绘出版社,1990.)
[10] WANG Renxiang.Satellite Photogrammetric Principle for Three-line Array CCD Imagery[M].Beijing:Surveying and Mapping Press,2006.(王任享.三线阵CCD影像卫星摄影测量原理[M].北京:测绘出版社,2006.)
[11] WANG Renxiang.Bundle Adjustment of Satellite Borne Three-line Array CCD Image[J].Geomatics and Information Science of Wuhan University,2003,28(4):379-385.(王任享.卫星三线阵CCD影像光束法平差研究[J].武汉大学学报:信息科学版,2003,28(4):379-385.)
[12] YANG Yuanxi.Some Notes on Uncertainty,Uncertainty Measure and Accuracy in Satellite Navigation[J].Acta Geodaetica et Cartographica Sinica,2012,41(5):646-650.(杨元喜.卫星导航的不确定性、不确定度与精度若干注记[J].测绘学报,2012,41(5):646-650.)
[13] WANG Renxiang,WANG Jianrong,HU Xin.Study on the Photogrammetry of In-Flight Satellite without Ground Control Point[J].Geomatics and Information Science of Wuhan University,2011,36(11):1261-1264.(王任享,王建荣,胡莘.在轨卫星无地面控制点摄影测量探讨[J].武汉大学学报:信息科学版,2011,36(11):1261-1264.)
[14] WANG Jianrong,WANG Renxiang.EFP Multi-functional Bundle Adjustment of Mapping Satellite-1 without Ground Control Points[J].Journal of Remote Sensing,2012(S1): 112-115.(王建荣,王任享.天绘一号卫星无地面控制点EFP多功能光束法平差[J].遥感学报,2012(S1): 112-115.)
(责任编辑:张燕燕)
First Practice of LMCCD Camera Imagery Photogrammetry
WANG Renxiang1,2,WANG Jianrong1,2,HU Xin1,2
1.State Key Laboratory of Geo-Information Engineering,Xi’an 710054,China;2.Xi’an Institute of Surveying and Mapping,Xi’an 710054,China
The LMCCD camera is one of the payload in TH-1 satellite,which is the key step to ensure photogrammetry accuracy without ground control point.The camera parameters of TH-1 is calibrated on-orbit using LMCCD imagery and three-line-array CCD imagery,and the position accuracy are statisticed using different on-orbit calibration results especially the elevation error.The experimental results shows:The adjustment strip system deformation caused by satellite attitude change rate can be resisted in camera on-orbit calibration using LMCCD imagery compared with the single three-line-array CCD imagery.Under condition of the satellite attitude change rate in TH-1,it can be ensure 01 star of TH-1 photogrammetry accuracy without ground control point with camera parameters on-orbit calibration using LMCCD imagery.
satellite photogrammetry;three-line array CCD imagery;LMCCD camera;aerial triangulation
WANG Renxiang(1933—),male,academician of Chinese Academy of Engineering,majors in satellite photogrammetry methods and applications.
WANG Jianrong
P236
A
1001-1595(2014)03-0221-05
2013-09-10
王任享(1933—),男,中国工程院院士,从事卫星摄影测量的理论和应用研究。
王建荣
E-mail:jianrongwang@sina.com
WANG Renxiang,WANG Jianrong,HU Xin.First Practice of LMCCD Camera Imagery Photogrammetry[J].Acta Geodaetica et Cartographica Sinica,2014,43(3):221-225.(王任享,王建荣,胡莘.LMCCD相机影像摄影测量首次实践[J].测绘学报,2014,43(3): 221-225.)
10.13485/j.cnki.11-2089.2014.0032
修回日期:2013-12-16
猜你喜欢
当代陕西(2020年23期)2021-01-07
汽车维修与保养(2020年11期)2020-06-09
北京航空航天大学学报(2017年4期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
中国工程咨询(2017年12期)2017-01-31
光学精密工程(2016年3期)2016-11-07
安徽地质(2016年4期)2016-02-27
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
全球定位系统(2015年4期)2015-02-28