
面向留学生的“自动控制原理”教学改革
2014-07-04 11:30张有光赵海云郭媛媛
电气电子教学学报 2014年6期
高 飞,马 飞,张有光,赵海云,郭媛媛
(北京航空航天大学电子信息工程学院,北京100191)
“自动控制原理”是电子信息类、机械类、宇航类和仪器等相关专业重要的专业基础课程。该课程理论性强、内容丰富、涉及知识面广、信息量大及发展更新快。该课程不仅要让学生掌握经典的控制理论,更主要的是培养学生的大工程观,培养他们对控制系统的设计能力、工程实践能力和创新能力[1]。
随着我校留学生人数的逐年增加,用英文授课的“自动控制原理”(Principle of Automatic Control)课程受到了留学生的普遍欢迎,选课人数不断增加。在这种形势下,如何将新的教学理念融入留学生的课堂教学中,是一个非常值得探讨的问题。
1 留学生“自动控制原理”课程现状
我校此前为留学生开设课程的教学方式和实验内容基本沿用了中文班的教学模式,只是重新选取了教材并对内容作适当筛选。由于未针对留学生的特点做出改进,教学效果不甚理想。
留学生的学习习惯和思维方法与中国学生存在很大区别,他们习惯于借助物理模型或实际例子理解理论知识。而此课程中控制系统的案例和实验大多仍采用传统的电路如RLC网络。他们认为:这些例子在之前的“电路分析”和“信号与系统”课程中已经见过:那么多数学公式怎么用?实际复杂系统模型有电路网络模型那么简单吗?他们更关注于控制系统中实际系统模型的建立方法和课程的适用性及可扩展性。在现有的英文班教学模式下,留学生虽然学习了很多理论知识,但困惑于理论的实际意义和应用方式,这样的学习效果为后续专业课程的学习、毕业设计及就业等带来许多问题[2]。
另一方面,“自动控制原理”所涉及的数学基础较为广泛,而留学生来自不同的国家,其课程基础差异大,尤其是数学基础比较差。虽然我们可以在课堂上适当补充一些数学内容,但这不仅压缩了自动控制内容的课时,也无法从根本上提高学生的数学基础。因此,通过数学推导加深对理论知识的理解这一方法只适用于有较好基础的中文班学生。对于重应用、基础弱的留学生而言并不适用,太多的数学内容反而使他们没有时间去按照自己习惯的思维方式去理解课堂内容,使学习效果大打折扣。
在实验课程方面,现有的英文班实验内容主要以课本中的理论知识为基础,将传递函数作为实验命题,使用Matlab对理论知识进行复现和验证。通过实验,学生提高了在系统仿真方面的能力,但是对控制理论的理解仍停留在数学模型阶段,难以在数学表达式与实际的控制系统之间建立联系[3]。
2 留学生“自动控制原理”教学探究
为了提高留学生的学习效率,培养他们的大工程观,在分析留学生自身特点和现有问题的基础上,本文给出了基于系统工程的大工程观教学法。
2.1 系统工程的教学实例
“大工程观”教育的理念就是要建立具有大工程观、大系统观和大集成观的工程教育体系,培养学生知识的复合型和能力的多样性。
我们基于系统工程的大工程观教学法,将“高超声速飞行器建模与控制”作为系统工程引进“自动控制原理”教学,并贯串整个教学过程,在各章中逐步加以深化。其内容包括高超声速飞行器运动学方程的建立、系统分析和运用控制理论实现对高超声速飞行器的控制,并在此基础上重新设计实验内容。在课堂教学中使用这一综合性的工程实例代替部分数学推导,引导学生以每一章的理论知识作为工具,逐步对该系统进行由浅入深的分析和改进。这一教学模式更符合留学生的思维习惯,能够帮助其更好地理解相关内容,同时减轻他们的学习负担。
这种教学法的首要问题是工程系统的选取,它既要贴近实际又要与自动控制原理相关。选取“高超声速飞行器建模与控制”作为工程系统实例,主要考虑到以下几个原因。
(1)飞行器建模与控制是一个综合性的问题,相比于常见的“倒立摆”等例子,其应用的控制理论知识更全面,如飞行器姿态角、高度、速度等参数的控制,需要自动控制理论和现代控制理论的基础理论作为支撑。而且这一实例贴近于实际工程,更能体现控制理论在应用领域的巨大作用。
(2)我校作为一个以航空航天为特色的高校,在飞行器建模与控制方面有着深厚的积累。以此为工程实例,可以充分发挥学校的这一学科优势,减少教师前期准备的工作量。
(3)学生在本科一年级学习了“航空航天概论”,已基本掌握了飞行器的基本构造和气动原理等相关知识,为工程的引入和模型的建立已打下了基础。
(4)高超声速飞行器具有飞行速度快、飞行高度高和突防能力强的特点,能够在1小时内对全球范围内的敏感目标进行精确打击,一直被国际防务界视为改变游戏规则的武器,成为各国军备竞争的焦点[4]。将其作为研究对象,更易于激发学生的学习热情,提高他们学习的主观能动性。
2.2 大工程观教学法
该教学法的流程如图1所示,整个过程可分为建立系统、分析系统和改进系统三部分。

图1 基于系统工程的大工程观教学法流程图
(1)建立系统的非线性数学模型
我们选择AFRL/RBCA高超声速飞行器作为分析对象,其外形和内部空间子系统如图2所示[5]。该飞行器起飞后,首先通过火箭等载体将其送至一定高度后开始爬升,当到达指定轨道后开始等高巡航,最后快速下降,进入再入段。航迹如图3所示。
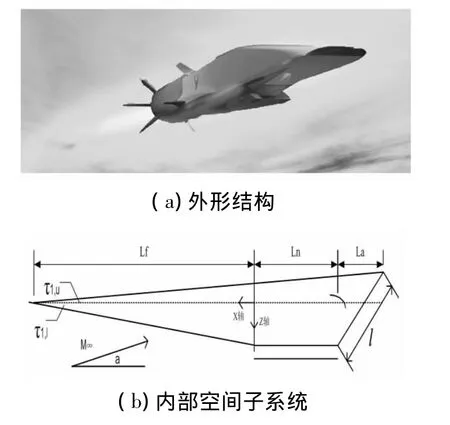
图2 高超声速飞行器
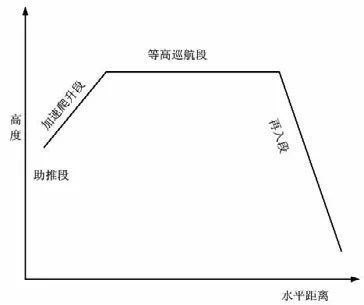
图3 高超声速飞行器航迹图
假设推力方向沿发动机轴线与机身轴线平行。基于万有引力定律、牛顿第二定律、圆周运动理论和刚体旋转的微分方程式,可得到飞行器纵向动力学模型。
尽管高超声系统具有复杂性、强非线性、时变和多变量等特点,若在课堂讲授时,详细分析和推导每一个步骤,会让学生陷入困境。所以我们在实际处理时,告诉学生在哪些步骤上分别用到了空气动力学、弹性力学、材料力学和空间技术等知识,以便将来有兴趣可以深入研究,并留出了扩展的余地。在此基础上进一步开展系统分析和控制器设计。整个过程主要目的是让学生感受到一个事实:实际系统的确很复杂,需要很多学科知识作支撑,但合理简化后可以用自动控制的思想去解决问题。
这一部分是教学重点,也是传统教学最容易忽略的部分。传统教学认为数学建模过程复杂,且与本课程内容无关,可以忽略,仅对既有的传递函数进行分析。但只有通过这一建模过程,学生才能明白自动控制原理的应用场景,学会如何将一个实际系统转化为可以用控制理论解决的模型,从而直观地建立起理论与实物之间的联系。
(2)数学模型与传递函数的相互转化
一个复杂的数学模型如何变成熟悉的传递函数?这是留学生最感兴趣也是最令他们困惑的问题。这一部分的具体过程是:以节流阀开度升降舵偏角为输入,飞行速度、航迹角、迎角、俯仰角速度以及飞行高度为状态变量,以实际应用中最关心的飞行高度和速度作为输出,将微分方程组写成飞行器的状态空间表达式:

其中,x表示状态变量y为输出。A、B、C和D分别表示系统矩阵、输入矩阵、输出矩阵和前馈矩阵。
(3)系统性能分析
学生在学习完各章理论知识后,使用每章的新方法对系统的各项性能进行分析,并使用现代控制理论的方法,实现对高超声速飞行器航迹和速度的控制。这一过程能够使学生在第一时间对新知识产生感性的认识,厘清各章节在内容上的相互关系,初步了解控制原理如何在实际工程中发挥指导作用。
(4)改进实验设计
我们结合课堂上对系统工程的分析,改进实验内容,具体包括:①利用Matlab计算系统的零极点、频率特性,画根轨迹图;②根据课堂上使用极点配置法得到的结果,按照图4所示结构,使用Simulink软件对模型进行仿真分析,比较加入控制器前后的结果;③观察状态反馈对系统带宽、峰值时间、稳态位置误差和稳态速度误差等系统参数的影响,从而加深对控制理论的理解[6]。

图4 极点配置仿真结构
分别模拟一个未加控制器和一个使用极点配置的高超声速飞行器在h=5000m处脱离载机,以初始速度v=3Ma进行两次爬升,其轨迹如图5所示。通过比较可得,极点配置后,实现了对飞行器航迹的控制,与理论分析结果一致。
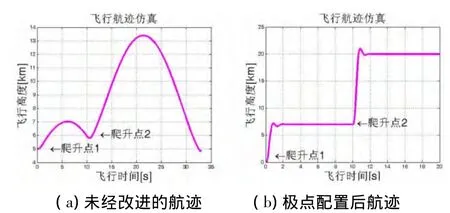
图5 飞行器航迹仿真结果
2.3 大工程观教学法的优点
(1)此教学法将具有工程背景的“高超声速飞行器的建模与仿真”作为命题,赋予理论知识特定的物理含义。这种实际工程与理论相结合的学习方法更符合留学生的学习习惯和思维方式,具有直观性、实践性、综合性、探索性和启发性的特点。能够帮助学生理解和巩固自动控制理论课程所阐述的基本原理,树立大工程观,培养学生分析问题和解决问题的能力。
(2)用此工程实例绕过部分数学推导,在保证学习效果的前提下,尽量减少了由数学和专业基础薄弱给留学生带来的困难。
(3)留学生通过用各章知识对系统进行分析,不仅能够理解在实际中如何运用每一章的知识,而且能够将该课程所学的方法和结论系统地梳理一遍,将碎片化的知识点整合成一个系统。
3 结语
本文提出了面向留学生的基于系统工程的大工程观教学法,将“高超声速飞行器建模与控制”作为系统工程全面引进教学,引导学生运用各章节的理论工具对该系统工程进行由浅入深地分析和控制。该教学法一方面考虑到留学生的思维方式和学习习惯,帮助学生通过理论与实际加深对知识的理解;另一方面能够减轻学生的学习负担。经2~3年的试行,在留学生中引起了较好的反响。学生的学习积极性、选课人数均有了大幅提升。
[1]周爱东.大工程观背景下开放型化工仿真实验的教学实践[J].上海:实验室研究与探索,2010,29(2):96-108
[2]曾庆军.自动化专业控制类课程群实验教学改革[J].上海:实验室研究与探索,2006,25(5):633-665
[3]夏静萍.自动控制原理实验教学探究_基于实物命题的递进式教学法[J].上海:实验室研究与探索,2013,32(12):185-189
[4]埃尔洛.中国首测新型高超音速飞行器速度达10马赫[EB/OL][J].http://www.guokr.com/post/554701/,2014
[5]苏二龙.考虑气动加热和变截面惯性矩的高超声速飞行器建模与分析[J].北京:宇航学报,2012,33(6):690-697
[6]周川.高超声速飞行器的模型线性化及极点配置设计[J].北京:仪器仪表学报,2008,29(8):364-367
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
通信电源技术(2018年3期)2018-06-26
小哥白尼(趣味科学)(2018年5期)2018-06-21
电子制作(2017年13期)2017-12-15
科教导刊·电子版(2016年30期)2016-12-26
大学教育(2016年11期)2016-11-16
铁道通信信号(2016年12期)2016-06-01
海峡科技与产业(2016年3期)2016-05-17
太空探索(2014年5期)2014-07-12
