
形状先验和图割的高分辨率遥感影像道路段提取
2014-07-25 04:17周绍光岳建平
测绘学报 2014年1期
周绍光,陈 超,岳建平
1.河海大学 地球科学与工程学院,江苏南京 210098;2.江苏省基础地理信息中心,江苏南京 210013
1 引 言
20世纪70年代,有学者开始研究利用计算机提取遥感影像中的道路,并且取得了一定的进展。文献[1]基于局部灰度一致性并结合形状特征提取道路;文献[2]给出了一种从高分辨率遥感影像中自动提取无清晰边缘线道路的方法;文献[3]结合LiDAR数据和遥感影像两种信息提取城市道路并进行建模。此外,还有分别基于平行线对[4-5]、基 于 二 值 化 知 识[6]、基 于 窗 口 模 型 特征[7]、基于模糊聚类[8]、基于灰度形态学[9,21]等理论的道路提取方法。
当前,初中教育往往把学生当作被教育的对象,教育者主要关注如何把知识、道理、准则等灌输给学生。学生虽然储备了许多知识,但由于不能调动主观能动性,导致其在实践中并不能灵活运用所学知识。教师不仅要传递知识,更要启迪学生的智慧。曾有专家指出:“学生能否进行自我教育以及在什么水平上进行自我教育,乃是衡量教育是否成功以及在什么程度上成功的一个重要标准。”初中物理教学需要抓住物理学科的趣味性、实践性、生活性等特点,启发、培养、促进学生的自我教育。
提取道路时,多数方法均会得到断裂的道路段这一中间结果,如何连接断裂的道路段是提取过程中的难点,而已有的研究大多针对其余阶段展开。对此,本文探索了一种连接初始道路段的策略:首先构建马尔可夫随机场下的经典能量函数,为了连接道路时能获得无粘连块、无孔洞的道路段,在经典能量函数中分别加入两种形状先验,构成新的能量函数,利用图割解算新能量函数后即可达到连接初始道路段的目的。
在连接初始道路段方法的基础上,给出了一种从高分辨率影像中提取道路段的方法:首先利用Gabor滤波器进行预处理操作,获得待分割特征矢量;基于图割理论解算经典能量函数,从待分割特征矢量中检测道路候选点;接着应用直线匹配法获取初始道路段;最后利用图割解算融合两种形状先验信息的能量函数,结合动态外推的思路连接初始道路段,获取完整道路网。
2 算法具体步骤
2.1 影像预处理
仅依靠光谱信息难以区分遥感影像中的道路与其他地物,利用Gabor滤波器获取影像的角度纹理特征[10],并与灰度特征共同组成待分割特征矢量。
2.2 获取道路候选点
2.2.1 经典能量函数
采用SPSS 17.0统计学软件对数据进行处理,计量资料以“±s”表示,采用t检验,计数资料以百分数(%)表示,采用x2检验,以P<0.05为差异有统计学意义[3] 。
本文基于图割理论解算经典能量函数,从而从待分割特征矢量中检测出道路候选点。本文使用的经典能量函数为

式中,等号右边第1项为数据项,第2项为边缘项。为了利用图割解算经典能量函数,必须在2.1节特征矢量的基础上构造满足式(1)的图。
第2组试验影像中,道路与背景相似,不易区分。未添加矩形模板的分割结果如图(e)所示,分割结果中包括两条主干道和大量干扰物。解算含有如图(d)所示的矩形模板的能量函数后的结果如图(f)所示。可以看到,已经排除了矩形模板外的绝大部分道路与干扰物。但由于道路周围的屋顶与道路的灰度值非常相似,并且两者距离很近,因此即使添加了矩形模板,道路周围依然存在干扰物(图(f)中的椭圆处),这是需要解决的一个问题。
将物体的形状先验知识与图像分割相结合的思路,已经在水平集和一些其他的曲线演化方法中得到了较为广泛和深入的研究。文献[13,14,16—20]都在分割图像的过程中应用了物体的形状先验。
本文利用Boykov在文献[11]中的公式构造N链

大多数的文献一般都利用高斯密度函数刻画T链,高斯密度函数包括单高斯模型和高斯混合模型 (Gaussian mixture model,GMM)[11-14]。单高斯模型适合于简单数据的建模,高分辨率遥感影像中存在道路、房屋、树木、河流等多种地物,并且相同的地物可能会呈现出不同的形态,因此本文利用GMM构造T链。
高斯混合模型的概率密度函数如公式(3)所示
留学生的职业技能课教学有两种方式:单独列班或混班。在留学生入学之初,汉语水平还不高的情况下,职业技能基础课(如《计算机基础》)选择单独列表,采用英文教学,给留学生打下扎实的基础。在职业技能核心课的教学过程,根据课程开展的实际情况,可以选择单独列班或者混班教学,建议采用混班,开展双语教学。通过混班教学,可以有效加强多元文化的沟通和交流,节省教学资源,提高学生的英语和汉语水平。
党的十九大报告提出,创新是引领发展的第一动力,是建设现代化经济体系的战略支撑。在中国益生菌领域,科拓恒通瞄准世界科技前沿,强化前瞻性基础研究与应用结合,取得了一系列引领性原创成果重大突破,特别是在中国自有菌株研究领域,突破了自主知识产权匮乏的壁垒,跻身世界益生菌行业前列。

式中
(4)令(P,S)=-log(PB),(P,T)=-log(PF),Valuemin为 (P,S)、(P,T)中的最小值,Source、Sink分别表示像素与源、汇相连接的T链值,则Source= (P,S)-Valuemin,Sink= (P,T)-Valuemin。
青辰并不是一个没有主见的人。自幼的天葬院生活,让他看淡了生死,也看透了许多其他的事情,让他对人世间的诱惑有着更好的自制力。然而,这种单调枯燥的童年生活,令他一旦开始喜欢上一件事,便会比常人更深地陷入执迷。
(1)在特征矢量图上选择若干有代表性的目标样本和背景样本。

(3)将特征矢量值分别代入pF(x)和pB(x),得到每一像素点分别属于目标模型和背景模型的概率密度值,分别表示为PF和PB。
本文计算T链的具体步骤为:
高斯混合模型中唯一需要确定的参数为K,一般通过目视观察的方法确定。一般情况下,K值越小,运行时间越短,但是精度将受到影响;K值越大,精度将得到保证,但运行速度可能会变慢。需要结合影像确定最佳K值。
选择一种最大流最小割算法解算图后,即从待分割特征矢量中检测出道路候选点。本文使用Boykov的基于增广路径的最大流算法[12]获取最小割。
2.3 获取初始道路段
利用文献[15]提出的直线匹配法处理道路候选点以得到初始道路段。
where k is the wavelength of the coming signal;xm and are the coordinates of the mth sensor in the NLAs Xaand Ya,respectively.
2.4 连接初始道路段
在2.3节中获得的初始道路段存在着断裂、缝隙和孔洞等问题,需要进一步处理。本文主要在式(1)基础上分别引入两种形状先验能量项,得到新的能量函数;接着基于图割理论解算新的能量函数,并结合动态外推的思路连接断裂的道路、填充道路孔洞和缝隙。
构造一幅图的实质是分别构造出N链与T链,N链与T链分别对应式(1)的边缘项、数据项。
2.4.1 新的能量函数
为了保证在连接初始道路段时,仅得到待连接道路、排除其他道路及干扰物的影响,首先引入一种用无符号距离函数表达的形状先验。φ为无符号距离函数,φ(x)表示点x与轮廓间的最小欧氏距离。由于一条道路段可以用多个大小、方向各异的小矩形近似表示。因此,本文构造矩形形状的模板。用Es1表示由无符号距离函数获得的形状模板的能量项

将式(5)与式(1)相结合,得到一个新的能量函数

式中,λ2表示Ei与Es1间的权重,取值在[0,1]之间。为了利用图割理论最小化式(6)表示的能量函数,同样需要根据公式(6)分别构建N链和T链。将Es1表示为N链,并与式(1)的N链合并,公式(6)的T链则与公式(1)一致,从而得到公式(6)的图,利用Boykov算法解算即可。
图1中的第1组试验影像中,道路与背景的光谱值差别较为明显,道路周围存在部分与道路相似的干扰物。首先根据公式(1)分割试验影像,获取了完整的道路,但同时也分割出了部分干扰物(如图(b)所示)。添加图(a)中的矩形模板后,再基于公式(6)分割影像。在矩形模板的作用下,道路保持完整,同时剔除了图(b)中的粘连块(如图(c)所示)。
在式(8)基础上,基于动态外推的思路连接初始道路段,图5为连接原理图。连接初始道路段的步骤包括:

图1 匹配的矩形模板在道路分割中的作用(第1列:试验影像 第2列:无矩形模板的分割结果第3列:匹配的矩形模板的分割结果)Fig.1 Influences of a matching rectangular template in segmenting roads
2.2.2 图的构造
图2显示了分别经过旋转和平移的矩形模板对分割结果的影响。可看出,结合经旋转或者平移后的矩形模板,能够完整地提取出道路,同时去除了道路周围的干扰物。而由于平移、旋转后的矩形模板轮廓上像素的N链发生不可知的变化,导致分割出的道路内部出现了孔洞(椭圆所示)。这是需要避免的另一个问题。为了解决仅利用矩形模板出现的上述两个问题,下面将在公式(6)的基础上进一步引入另一种形状先验信息—星形形状先验[16]。
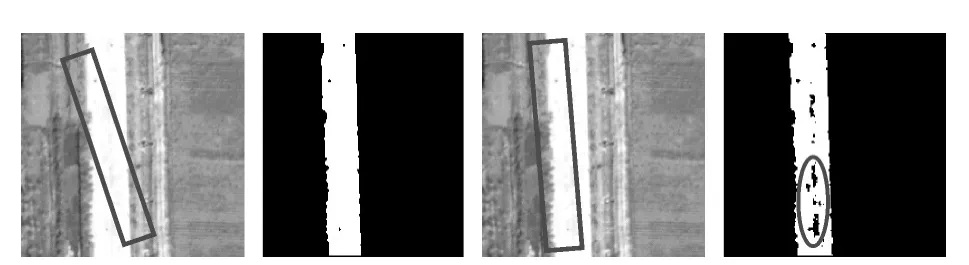
图2 旋转、平移后的矩形模板对分割结果的影响Fig.2 Influences of a rotated or translated rectangular template in segmenting roads
将星形形状作为图像分割中的先验信息,能保证仅分割出一个满足星形形状的物体,而满足星形形状意味着一个不含粘连块、无孔洞的连通成分,这正解决了上文出现的两种问题。
星形形状先验能量项表示为
其中让她印象深刻的是,菲律宾烤乳猪显然有种脱胎于西班牙烤乳猪的风格,但又融合了东南亚香料的风情,所以吃起来别有一番风味。而身为广东人的她,也吃过粤式乳猪,对比起来,菲律宾烤乳猪显得更加自成一派,虽然皮不求光彩和脆度,肉质也不追求鲜嫩多汁,但在“香”这一范畴上,还是有着显著的自我特色的。这种烤乳猪是选年纪比较小的猪,因为小猪皮嫩、脂肪少,味道可口。把小猪宰杀后,掏干净内脏,然后填入香蕉叶和其他一些香料,然后在炭火上慢烤,烤的时候猪皮上刷上油,这种油里面还加入了一种叫做atsuwete的调料,这就是为什么烤出来的乳猪皮呈暗红色的原因。做好的烤乳猪味道很奇特,与粤式乳猪完全不同风味。

构造满足式(8)的图时,只需将式(7)表示为N链,并与式(6)的N链合并即可。
(1)速度提升。根据胜利石油管理局提速提效考核细则的总体要求以及各个区块的考核指标,各个区块基本上达到了10%的提速目标,大北、桩23等区块提速效果超过30%。
2.4.2 基于动态外推的思路连接初始道路段
但由于颈2横突定位有较大的个体差异,且邻近有许多重要神经、血管,所以颈2横突注射操作有较大的风险性性,多要求在C型臂下操作,应由有丰富临床经验医生操作不可。
就我国输变电工程施工管理现状来看,整体上仍然比较混乱,管理观念陈旧、规章制度不健全等问题广泛存在。具体而言,整体管理现状有以下特点:
步骤1标记初始道路段。2.3节中,直线匹配法处理道路候选点后同时得到了方向图,方向图表示了每点所属的道路方向。根据这些道路点的方向值为道路段编号,得到一个标记数组。
步骤2计算道路段相关初始值。根据标记数组选择一条初始道路段,计算得到初始道路段主方向、道路段长、宽值及重心位置,这些值主要用于构建矩形模板与星形形状先验。
步骤3动态外推连接初始道路段。在步骤2选择的初始道路段基础上,围绕道路段两端中心点构建分割候选区,在候选区内构建满足能量函数式(8)的图,解算图后即获得新生长的道路段。重复本步骤,直到满足终止条件。图3是道路连接原理的示意图。步骤3的终止条件包括:每次得到的新生长的道路段的像素个数小于阈值thre1,则退出运算;一条道路段经外推已经与另一条道路相连时,退出运算。
辅导员和教师要关爱学生,及时发现学生的情绪波动情况,多与学生交流沟通,排解其内心的压抑,尽可能地为其提供生活和学习上的帮助。教师要与学生平等相处,开导他们要积极乐观地面对生活,避免心理问题影响其健康成长。
重复上述3个步骤,直至处理完所有的初始道路段,此时也已完成连接。

图3 连接原理示意图Fig.3 Diagram of connection
3 试 验
3.1 单条道路段动态分割试验
为了验证本文的连接方法是否可行,首先动态外推分割一条道路,如果能得到完整的道路段,说明思路合理且适用。通过人工给定相关初始值后解算公式(8),以得到初始道路段。
试验1影像大小为1600像素×261像素,影像中道路笔直,与周围背景容易区分,初始道路段主方向86°,宽24像素,模板长130像素,thre1为150像素,λ1=5,λ2=0.55。动态外推19次后,道路端中心点超出图像范围而退出运算。从图4(f)可看出,已经较为准确和完整地分割出道路。

图4 动态分割试验1Fig.4 Example one of dynamic segmentation

图5 动态分割试验2Fig.5 Example two of dynamic segmentation
试验2中影像大小为1600像素×209像素,影像中道路呈线状,与周围建筑物光谱值近似,并且受到汽车、建筑物阴影的干扰。初始道路段主方向92°,宽30像素,模板长设为100像素,thre1为150像素,λ1=0.5,λ2=0.55。动态外推11次后,受到建筑物阴影的影响,新生长道路段像素个数小于阈值而结束运算。
将公式(7)与公式(6)结合,得到最终的能量函数
两组动态外推分割试验均得到了较为完整、没有干扰物影响的道路段,可知本文的连接思路可行、有效。
3.2 道路段提取试验
选取两幅多波段遥感影像进行道路段提取试验。图6(a)显示了两幅不同地区的多波段遥感影像,大小均为500像素×500像素,图6(b)为图割解算经典能量函数后获得的道路候选点,图6(c)为经过直线匹配后获取的初始道路段图,去除了杂点、散点,但道路段明显不完整,存在多处断裂及孔洞,图6(d)为通过解算式(8)并结合动态外推思路获得的连接结果,道路段断裂问题得到明显改善(椭圆处)。

图6 道路段提取试验Fig.6 Experiments of road extraction
图7为利用文献[15]提取的道路段,该方法中,为了消除非道路干扰,需加严道路认定准则,由此会将部分道路误认为非道路,导致道路段不完整(图7(a)椭圆处);若为了保持道路段的完整性而放宽道路认定准则,则导致大量的粘连块出现(图7(b)椭圆处)。由于本文在后处理中运用了两种形状先验,在保持道路段完整性的同时较好地去除了粘连块。
利用下面的公式进行定量评价
准确率=正确提取的道路段面积/人工解译的道路段面积
防患未然 全面提升防灾减灾救灾能力 ...............................................................................................................5-1
遗漏率=遗漏提取的道路段面积/人工解译的道路段面积
根据上述评价指标,对本文得到的道路段做了如下统计。

图7 文献[15]的提取结果Fig.7 Extraction results of reference[15]

表1 本文提取结果统计Tab.1 Statistics of our method’s results %
从表1中可看出,提取出的道路段平均准确率可达88.49%,较为理想。
4 结 论
本文给出的从高分辨率遥感影像中提取道路段的方法的创新点在于将两种形状先验能量项引入经典能量函数,并结合动态外推的思路,得到一种连接初始道路段的新方法。
本文未验证该方法在大幅影像中的性能,没有考虑立交路、环形路等形状特别复杂的道路,这都是需要进一步研究的内容。
[1] LEI Xiaoqi,WANG Weixing,LAI Jun.A Method of Road Extraction from High-resolution Remote Sensing Images Based on Shape Features[J].Acta Geodaetica et Cartographica Sinica,2009,38(5):457-465.(雷小齐,王卫星,赖均.一种基于形状特征进行高分辨率遥感影像道路提取方法[J].测绘学报,2009,38(5):457-465.)
[2] ZHOU Shaoguang,XU Yong.To Extract Roads with No Clear and Continuous Boundaries in RS Images[J].Acta Geodaetica et Cartographica Sinica,2008,37(3):301-307.(周绍光,徐勇.在高分辨率遥感影像中提取无清晰连续边缘线的道路[J].测绘学报,2008,37(3):301-307.)
[3] LI Hui.Road Extraction and Modeling with LiDAR and RS Image in Urban Area[J].Acta Geodaetica et Cartographica Sinica,2011,40(1):133-133.(李卉.集成LiDAR和遥感影像城市道路提取与三维建模[J].测绘学报,2011,40(1):133-133.)
[4] WEN Gongjian,WANG Runsheng.Automatic Extraction of Main Roads from Aerial Remote Sensing Images[J].Journal of Software,2000,11(7):957-964.(文贡坚,王润生.从航空遥感图像中自动提取主要道路[J].软件学报,2000,11(7):957-964.)
[5] TRINDER J C,WANG Y D,SOWMYA A,et al.Artificial Intelligence in 3DFeature Extraction[C]∥Automatic Extraction of Man-made Objects from Aerial and Space Images.Basel:Birkhaeuser Verlag,1997:257-265.
[6] DONALD G,JEDYNAK B.An Active Testing Model for Tracking Roads in Satellite Images[J].IEEE Transform on Pattern Analysis and Machine Intelligence,1996,18(1):12-14.
[7] BARZOHAR M,COOPER D B.Automatic Finding of Main Roads in Aerial Images by Using Geometric-stochastic Models and Estimation[J].IEEE Transform on Pattern Analysis and Machine Intelligence,1996,18 (7):707-721.
[8] WAN Youchuan,SHEN Shaohong.A Road Extraction Approach Based on Fuzzy Logic for High-resolution Multispectral Data[C]∥Proceedings of IEEE Fourth International Conference on Fuzzy Systems and Knowledge Discovery.[S.l.]:IEEE,2007:203-207.
[9] ZHU Changqing,WANG Yaoge.Road Extraction from High-resolution Remotely Sensed Images Based on Morphological Segmentation[J].Acta Geodaetica et Cartographica Sinica,2004,33(4):347-351.(朱长青,王耀革.基于形态分割的高分辨率遥感影像道路提取[J].测绘学报,2004,33(4):347-351.)
[10] LI Jinhui.Segmentation Algorithm for Road-images Using Gabor Filter and Markov Random Field[D].Nanjing:Hohai University,2009.(黎瑾慧.基于Gabor滤波器和MRF的道路影像分割方法研究[D].南京:河海大学,2009.)
[11] BOYKOV Y,MARIE P J.Interactive Graph Cuts for Optimal Boundary & Region Segmentation of Objects in N-D Images[J].Imaging and Visualization Department Siemens Corporate Research,2001,1(6):105-112.
[12] BOYKOV Y,KOLMOGOROV V.An Experimental Comparison of Min-cut Max-flow Algorithms for Energy Minimization in Vision[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2004,26 (1):1124-1137.
[13] DAS P,VEKSLER O,ZAVADSKY S,et al.Semiautomatic Segmentation with Compact Shape Prior[C]∥Proceedings of the 3rd Canadian Conference on Computer and Robert Vision.[S.l.]:IEEE,2006:28-36.
[14] FREEDMAN D,ZHANG Tao.Interactive Graph Cut Based Segmentation with Shape Priors[C]∥Proceedings of IEEE Society Conference on Computer Vision and Pattern Recognition.[S.l.]:IEEE,2005:755-762.
[15] SHI Wenzhong,ZHU Changqing.The Line Segment Match Method for Extracting Road Network from High-resolution Satellite Images[J].IEEE Transaction on Geoscience and Remote Sensing,2002,40(2):511-514.
[16] VEKSLER O.Star Shape Prior for Graph-cut Image Segmentation[C]∥Proceedings of the 10th European Conference on Computer Vision.Berlin:Springer-Verlag,2008:454-467.
[17] SLABAUGH G,UNAL G.Graph Cuts Segmentation Using an Elliptical Shape Prior[C]∥Proceedings of IEEE International Conference on Image Processing.Genoa:IEEE,2005:1222–1225.
[18] VICENTE S,KOLMOGOROV V,ROTHER C.Graph Cuts Based Image Segmentation with Connectivity Priors[C]∥Proceedings of IEEE Conference on Computer Vision and Pattern Recognition.Anchorage:[s.n.],2008:1-8.
[19] WANG Hui,ZHANG Hong.Adaptive Shape Prior in Graph Cuts Segmentation[C]∥Proceedings of IEEE International Conference on Image Processing.Hong Kong:[s.n.],2010:3029-3032.
[20] MALCOLM J,RATHI Y,TANNENBAUM A.Graph Cuts Segmentation with Nonlinear Shape Priors[C]∥Proceedings of IEEE International Conference on Image Processing.San Antonio:[s.n.],2007:365-368.
[21] SONG Y,WAN Y C,SHEN H S,et al.Road Information Extraction from IKONOS Imagery Based on Clustering Analysis and Mathematical Morphology[C]∥Proceedings of SPIE 6786,MIPPR 2007:Automatic Target Recognition and Image Analysis and Multispectral Image Acquisition.[S.l.]:SPIE,2007.
猜你喜欢
中学生天地(A版)(2022年11期)2022-11-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
成都信息工程大学学报(2019年3期)2019-09-25
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
新世纪智能(英语备考)(2018年11期)2018-12-29
中学生数理化·八年级数学人教版(2017年4期)2017-07-08
自动化学报(2017年5期)2017-05-14
小天使·五年级语数英综合(2016年12期)2016-12-09
光学精密工程(2016年4期)2016-11-07
探测与控制学报(2015年4期)2015-12-15
