
惯导系统拐弯状态下姿态角误差变化研究
2014-08-09 22:20何小飞
航天控制 2014年3期
周 斌 王 巍 何小飞
1. 北京航空航天大学仪器科学与光电工程学院,北京100191 2. 北京航天控制仪器研究所,北京100854
惯导系统拐弯状态下姿态角误差变化研究
周 斌1王 巍2何小飞2
1. 北京航空航天大学仪器科学与光电工程学院,北京100191 2. 北京航天控制仪器研究所,北京100854

由于水平姿态角误差的大小对导航结果影响非常大,通过研究车载试验过程中水平方向欧拉角误差大小发生“跳变”的现象,找出影响拐弯状态下水平姿态角误差变化的因素。首先对转动前后失准角变化大小进行了定量分析;然后推导出欧拉角误差和失准角之间关系式,得出产生欧拉角误差变化的原因;最后通过仿真和试验对上述结论进行验证。
惯导系统;定量分析;欧拉角误差;失准角
地面车载惯性导航系统中,由于水平姿态角误差的大小对导航定位结果影响非常大[1],0.01°水平姿态角误差对应的经纬度误差中舒拉振荡幅值大约为1.5n mile。在进行车载试验时,发现车辆拐弯前后水平姿态误差发生变化,且导航车直行后水平姿态误差仍相差很大,典型数据曲线如图1所示。从图中可以看出,每当航向角发生90°或180°大转弯时,载体水平方向横滚角误差大小将发生“跳变”。
为了提高导航精度,必须尽量减少水平方向姿态误差,为此提出研究拐弯状态下水平姿态角误差变化的影响因素,为工程上减低姿态角误差大小,提高动态导航精度提供参考。

图1 横滚角误差与航向运动关系图
1 转动前后失准角变化大小定量分析
理论分析可知,以失准角形式描述的姿态误差方程可表示如下[2]:

(1)
为方便分析,假设载体不存在线运动,并且忽略短时间内产生的速度误差对姿态角变化率及纬度误差和高度误差的影响。取当地地理坐标系“东北天坐标系”为导航坐标系时,则式(1)简化为:

(2)
式中,φE,φN,φU分别为东北天3个方向失准角。取地球半径为R=6371km,当地纬度为40°,3个方向陀螺漂移均为0.2(°)/h (1σ),初始航向角,俯仰角,横滚角分别为:180.000°,-0.030°,-0.009°,则对应的姿态矩阵为:
(3)
由实验室内利用转台模拟车载航向变化的试验测试数据可知,转动过程中3个陀螺输出的最大角速度大约为:
(4)
将上面已知条件代入式(2),并取其中2个水平方向失准角,写成分量形式如下:

(5)
假设航向角从180°转动至360°的过程中,安装误差角大小均为20″,标度因数非线性度为50ppm,转动开始时刻初始失准角为1°,由式(5)计算得出,失准角变化的最大值小于13.5(″)/s,设转动过程持续5~10s,则产生的失准角变化也只有6.5~13″,与实际结果(大约165″)相差1个量级,所以车载试验过程中产生的误差不仅仅是由转动瞬间陀螺漂移和安装误差等造成的。
2 欧拉角误差与失准角之间的关系
载体的姿态可以由3个欧拉角来描述,欧拉角误差定义为计算的欧拉角与真实欧拉角之间的误差,如下[3]:

(6)
设由导航坐标系先绕航向旋转φ(航向角北偏西为正)得到坐标系L1,再绕俯仰轴旋转θ得到坐标系L2,最后绕横滚轴旋转γ得到载体坐标系b,则有如下关系式成立:

(7)
代入式(7)得:

(8)
由式(8)可得欧拉角误差表达式如下:
(9)
由式(9)可知,即使在整个动态车载试验过程中,失准角均为常数,但由于载体运动过程中航向角和俯仰角的变化,欧拉角误差大小同样会发生变化。
假设3个方向失准角均为20″,且在整个过程中为常数,载体初始姿态角为:航向角0°,俯仰角1°,横滚角2°,则航向角从0°变化到180°的运动过程中,由式(9)计算出2个水平方向欧拉角误差变化如图2所示,从图中可以看出,在转动前后欧拉角误差发生了“跳变”的正常现象。

图2 航向角变化过程中水平欧拉角误差的变化仿真曲线
3 仿真分析
由第2节分析结果可知,水平欧拉角误差主要受2个方面的影响:1)载体运动过程中的失准角大小;2)载体的水平姿态角和航向角。本节通过3种不同条件下的仿真对以上结论进行验证。
仿真1:设陀螺不存在漂移,并且不存在初始对准误差,初始俯仰角为1°,横滚角为2°,考察航向角从0°变化到180°时,水平方向欧拉角误差的变化情况,结果如图3所示。
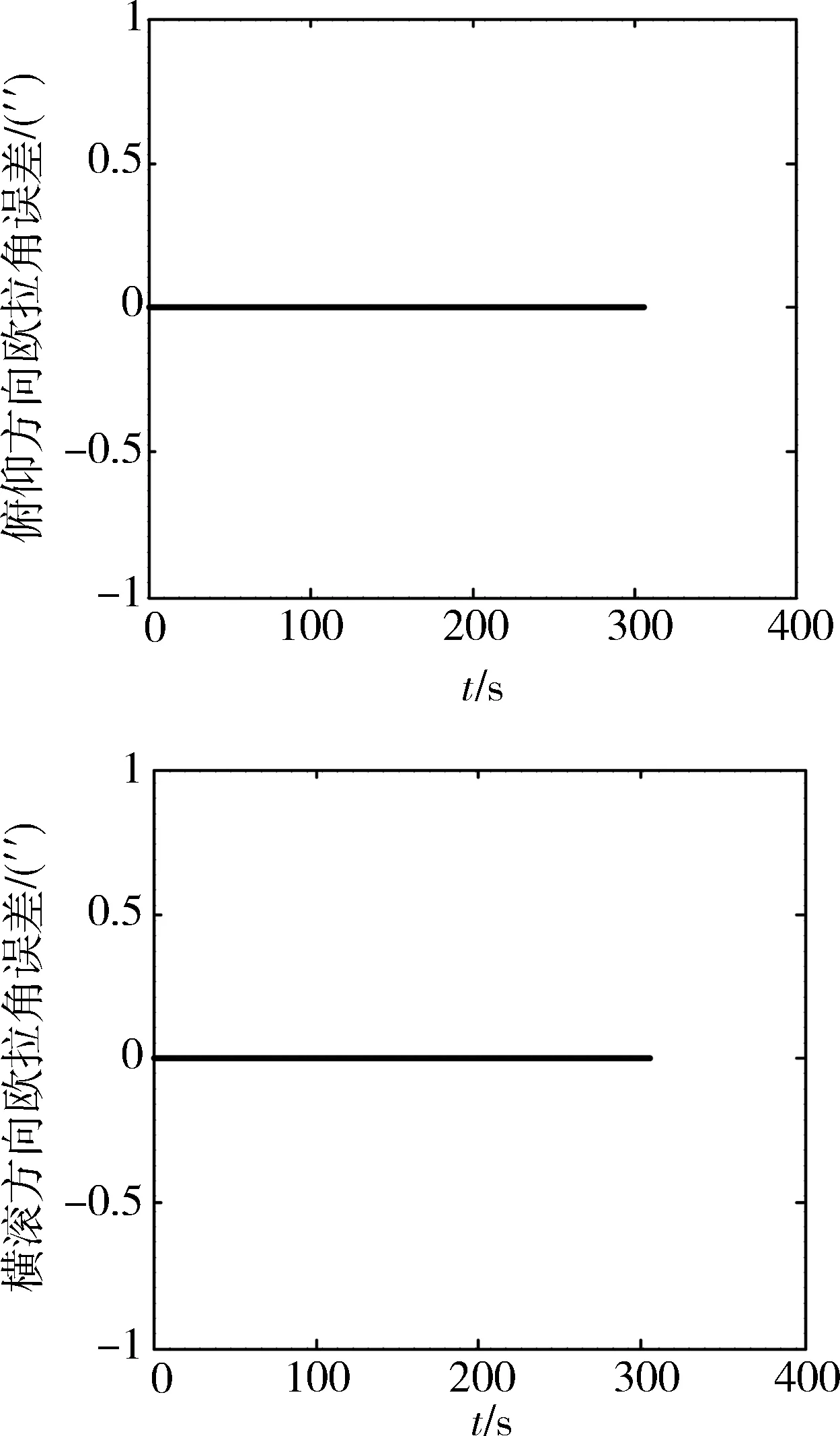
图3 水平方向欧拉角误差变化情况
仿真2:设陀螺存在常值漂移误差,大小为0.1(°)/h,不存在初始对准误差,初始俯仰角为1°,横滚角为2°,考察航向角从0°变化到180°时,水平方向欧拉角误差的变化情况,结果如图4所示。

图4 水平方向欧拉角误差变化情况
仿真3:设陀螺不存在常值漂移误差,但存在初始对准误差,设初始俯仰角为1.005°(真值为1°),横滚角为2.008°(真值为2°),考察航向角从0°变化到180°时,水平方向欧拉角误差的变化情况,结果如图5所示。

图5 水平方向欧拉角误差变化情况
从图3~5可以看出,当旋转开始时刻存在失准角,无论是陀螺漂移引起的,还是对准过程中的误差,在进行180°转弯后,欧拉角误差大小都会发生跳变。
4 试验验证
为了对上面的理论分析和仿真结果进行验证,在实验室条件下,利用单轴转台绕旋转轴转动180°来模拟车载试验过程中的航向角变化。
4.1 短时间航向变化180°姿态比较
将待测系统对准后,进入导航状态,然后转台旋转180°,再导航1min左右,在此位置重新对准,将导航计算姿态角和对准结果姿态角大小进行比较,结果如图6所示。
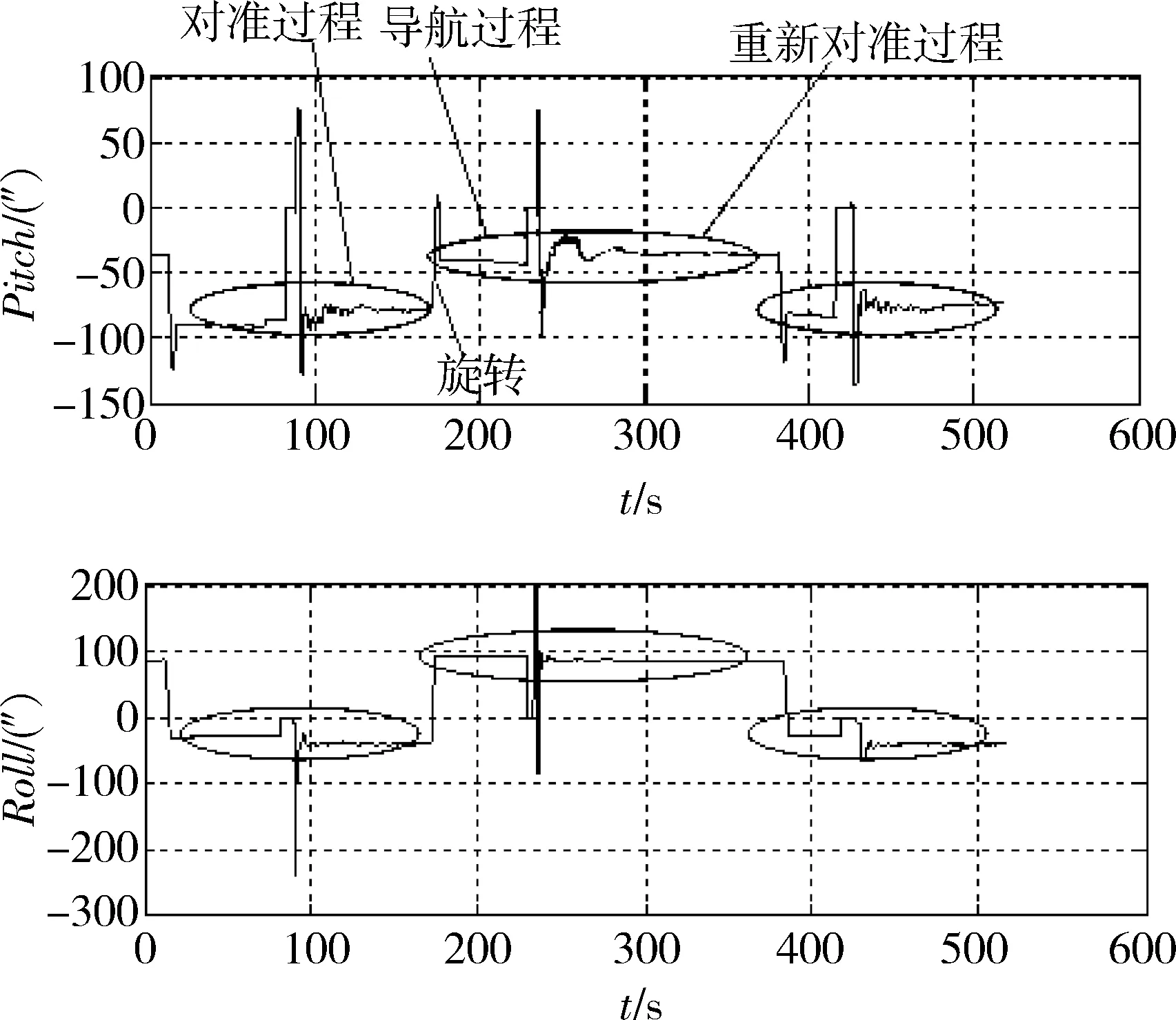
图6 导航计算姿态角和对准结果姿态角大小比较
待测系统中所用加速度计精度较高,水平初始对准精度在10″以内,从图6可以看出短时间内旋转180°后,导航计算的姿态角数值与重新对准的结果相差很小,说明转动过程中安装误差产生的姿态误差很小。
4.2 长时间航向变化180°姿态比较
将待测系统对准后,进入导航状态,然后将转台进行多次180°旋转,计算2个水平方向欧拉角误差的变化曲线如图7所示。

图7 水平方向欧拉角误差与航向角关系图
当长时间导航后,由于陀螺漂移的累积效应,产生较大的失准角,在进行航向180°运动时,2个水平方向的欧拉角误差出现了大的“跳变”,与实际车载试验结果一致。对准过程中的误差在整个导航过程保持不变,而陀螺漂移产生的失准角误差随时间增长,因此为了有效提高导航精度,必须降低陀螺漂移。
5 结论
通过对车载试验过程中的水平方向欧拉角误差大小发生“跳变”现象进行研究,可知试验过程中出现的欧拉角误差跳变主要是因为陀螺漂移等误差因素引起的积累姿态误差产生的,而不是瞬时陀螺漂移和转弯过程中安装误差角不准确造成的;其次是当载体存在失准角,并且载体的姿态角发生变化时,欧拉角误差大小有可能出现跳变的现象。因此在工程上应用时,为了提高导航精度,必须降低陀螺漂移和对准过程中的误差,并且利用失准角作为评判导航过程中姿态角精度的指标。
[1] 王巍.光纤陀螺惯性系统[M].北京:中国宇航出版社,2010,12.
[2] 秦永元.惯性导航[M].北京:科学技术出版社, 2005.
[3] Savage P G. Strapdown Analytics[M]. Strapdown Associates, Inc, 2000.
Research on Attitude Error Change of the INS under the Turning
ZHOU Bin1WANG Wei2HE Xiaofei2
1. School of Institution Science and Opto-Electronics, Beihang University, Beijing 100191, China 2. Beijing Aerospace Control Instrument Research Institute, Beijing 100854, China
Horizontalattitudeangleerrorshavebigimpactonthenavigationresult.ThroughresearchingontheEulerangleerror“jump”phenomenonduringthevehicletestprocess,theinfluencefactorsthatproduceattitudeangleerrorundertheturningarediscovered.Firstly,thechangeofthemisalignedangleisanalyzedquantitativelybeforeandaftertheturning,andthentherelationformulationisderivedbetweentheEulerangleerrorandmisalignedangleandthereasonwhyEulerangleerrorchangeisfoundout.Finally,theconclusionsaredrawnbythesimulationandtest.
Inertialnavigationsystem;Quantitativeanalysis; Eulerangleerror;Misalignedangle
2012-09-27
周 斌(1983-),男,江西人,博士研究生,主要研究方向为光纤陀螺惯导系统;王 巍(1966-),男,陕西人,博士,研究员,主要研究方向为惯性技术、光机电—体化测量与控制;何小飞(1978-),男,江苏人,硕士,高级工程师,主要从事光纤陀螺捷联惯性导航系统方面的研究。
V19
A
1006-3242(2014)03-0007-05
猜你喜欢
新世纪智能(高一语文)(2021年3期)2021-07-16
民用飞机设计与研究(2019年4期)2019-05-21
当代陕西(2018年12期)2018-08-04
科技视界(2017年6期)2017-07-01
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年24期)2017-02-02
软件导刊(2016年11期)2016-12-22
探测与控制学报(2015年4期)2015-12-15
法大研究生(2015年2期)2015-02-27
舰船科学技术(2014年3期)2014-08-26
