
船舶主机调速系统的研究与设计
2014-09-06 07:32,,,,
机械与电子 2014年8期
,,,,
(南京林业大学信息科学技术学院,江苏 南京 210037)
船舶主机调速系统的研究与设计
黄峰,周国平,王鑫鑫,姚达雯,李阳
(南京林业大学信息科学技术学院,江苏 南京 210037)
针对国产设备装船率低,设备可靠性低的情况,结合电-气主机控制和嵌入式主机控制对船舶设备的核心,即调速部分进行设计。设计了一种基于MSP430的船舶主机调速系统,这种调速系统可以通过操纵杆调速,遇到报警后减速,速度检测后对执行功能块进行速度反馈。结合MSP430控制精确的特点实现对船舶速度精确,灵活的控制。经测试,系统具有极高的可靠性。
船舶调速系统;MSP430;速度反馈;可靠性
0 引言
近年来我国造船业呈快速发展的态势,我国也已经成为全球重要的造船中心之一。但装船率低,可靠性不高,设计能力落后,大量核心装备依赖进口是制约我国造船业的主要瓶颈[1]。而主机调速系统是船舶主机遥控系统的核心。针对这一问题,结合电-气主机控制和嵌入式主机控制技术,研究了一种新型的主机调速综合控制系统,采用该系统可以满足船舶调速系统调速精确,高可靠性的要求。
1 总体设计
主机调速综合控制系统在硬件上主要包括6大模块,控制器、调速功能块、执行功能块、报警降速功能块以及转速检测调节功能块,完成对船舶速度的控制。其中,控制器处理各种情况后输出相应的电流;调速功能块调节其输出的电流,将给定的电流发送至控制器;执行功能块根据控制器输出的电流的任意变化改变比例阀开口大小,从而自动改变速度;报警调速功能块对主机出现一些特定报警时采取降速处理,从而降低船舶的航行速度;转速检测调节功能块对船舶尾轴转速进行检测和处理,将得到的转速偏差经过控制器处理后输出给定电流信号,具体框图如图1所示。

图1 系统总体框图
2 主机调速系统的硬件设计
2.1 单片机及外围电路
系统控制电路以MSP430F149单片机作为主控芯片,其外围电路主要包括晶振电路、上电复位电路以及程序下载电路等。
MSP430F149内部集成16位ADC转换电路,通过采样电阻将调速模块输出的电流信号转化为对应的电压信号,ADC模块完成电流的AD转换,可实现对调速模块输出电流变化的实时采样[2]。尾轴转速检测部分通过检测转速,将频率信号转换为对应的电流信号,与调速模块的电流比较,经过单片机计算误差与误差变化率,通过PID算法计算得到PWM波形的占空比,控制产生相应的PWM波,实现速度控制。
2.2 电源转换电路
由于船舶上使用的指示灯和继电器JQX-14FC-1H需要+24 V电压,IGBT驱动电压为9 V,MSP430F149使用的是3.3V,故系统需要一路电源转换电路,输出3组不同值的电压。电路采用了定压输入双路输出的DC/DC模块DCM24S9、稳压芯片7805及高效线性电源转换芯片ASM1117_3.3。电源转换电路首先通过 DCM24S9 把24 V电压转为9 V电压供给IGBT,7805将9 V电压降至5V,再经ASM1117_3.3降压至 3.3V电压供给主控制器。C1的作用是消减电源中的噪声,C2,C3一大一小2个电容对输出+5V电压滤波,提供稳定的+5V电源,C4,C52个电容也是起到滤波的作用。电源转换电路如图2所示。

图2 电源转换电路
2.3 调速功能块
调速功能块主要功能是在操纵器进行动作时,随着挡位的变化,调速模块的输出电流可以在4~20mA内变化。调速模块主要使用的LM358是一种双电压比较器集成电路,内含2个比较器U1A和U1B[3]。系统设计的调速电路如图3所示。当操纵器有挡位变化时,比较器输入端电压变化,通过比较器比较电位输出一个电压,再经过运放进行放大后通过一个镜像电流源就可以输出一个稳定的电流,达到控制比例阀输入的作用。其中,W1,W2分别调节U1A和U1B的基准电压,使操纵器空车时“+”端与“-”端电压相等;W3调节U2A的基准电压,当操纵器处于正车1挡时U2A的输出电压约为4 V;W4调节恒流源电流的输出范围,保证操纵器在1~4挡变化时的输出电流在4~20mA范围之内。在调速功能块上,利用相同的原理通过LM358和LED灯还可以指示操纵器的正车,空车以及倒车状态。
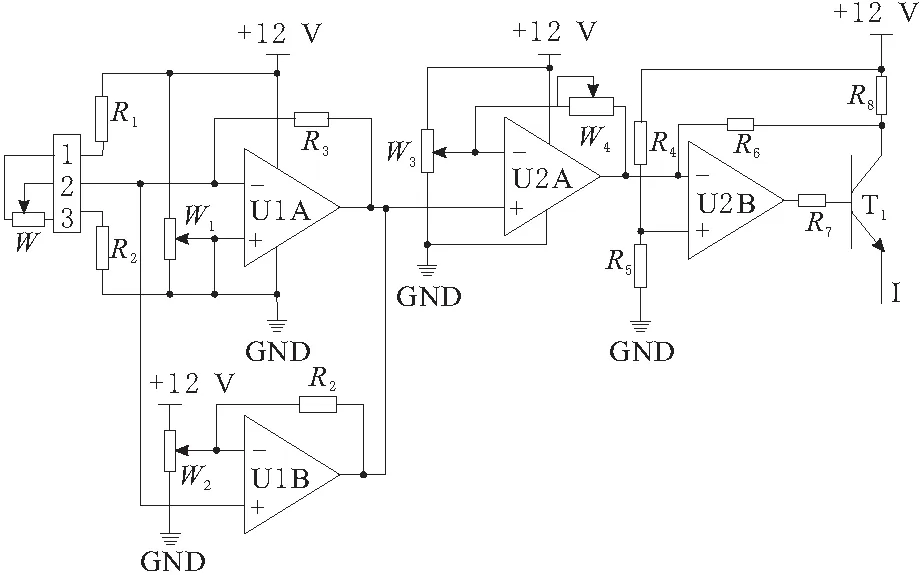
图3 调速模块电路
2.4 执行功能块
系统执行功能块由气瓶、阀门及比例阀构成的单机气路,气路图如图4所示。气路中用到的气瓶由船上提供,系统处于工作状态时监测气瓶气压是否低于0.8MPa,若低于0.8MPa,则给MSP430的I/O口一低电平,显示有一路失气报警。压缩空气首先通过截止阀(处于关闭状态,使用时打开),然后经过过滤减压阀,这时候气压可以调节,并调至0.8MPa,进入比例阀。系统设置两路减压阀的目的是一旦出现有一路不能正常使用时,可以使用备用减压阀。
控制器将调速模块给定的电流送到比例阀。比例阀开口大小依据控制电流大小进行调节,通过控制比例阀进入油缸的流量就可以控制油缸的速度。

图4 执行功能块气路
在挡位发生变化时,电流输出的大小为4~20mA,比例阀对应输出0~6kg的压力,带气缸时,活塞杆对应移动0~30mm。
2.5 报警降速功能块
报警降速功能块在主机报警时给MSP430的I/O口一低电平,显示有一路报警。MSP430在通过处理后改变控制IGBT的PWM波占空比来减小比例阀输入的电流。在主机出现气源低压、错向、主机、滑油低压、主机滑油高温、主机冷却水高温和齿轮箱滑油低压等一系列主机报警时,转速降低。在出现滑油过低压或者超速时,紧急停车继电器闭合,切断比例阀的输入。
2.6 转速检测调节功能块
转速检测调节功能块主要是对主机转速进行检测和数字处理[4]。尾轴的对应位置安装2块小磁铁,紧靠尾轴的2个霍尔传感器将尾轴的转速转换成频率信号。控制器通过处理计算出对应的电流,与给定的电流相比较。调节部分由偏差放大、放大和积分等模块组成一个转速复合控制系统,对转速偏差作比例积分运算后产生PWM控制信号,控制IGBT的通断,调节给定的电流,以进行速度精确控制。转速检测电路原理如图5所示。
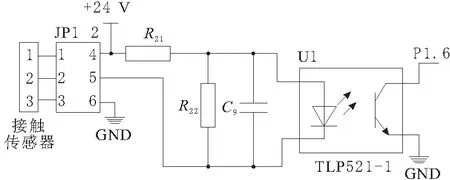
图5 转速检测电路
3 主机调速系统的软件设计
系统的控制程序主要由主程序与中断服务程序2部分组成。主程序主要包括单片机初始化,各种报警服务程序调用,各种参数数据的采集,PID算法计算PWM波的占空比及中断响应;中断程序包括报警中断,PWM控制中断等。系统初始化完毕后,进入主程序检测主机调速系统状态。若系统一直处于稳定状态,则一直在主程序循环,处于监测状态;若系统有变化,则根据各模块的状态做相应的处理。其中包括操纵器动作引起的调速模块电流的升高或降低;系统运行故障引起的报警降速;以及转速调节模块对给定电流与检测电流偏差的计算,调节比例阀输入电流。系统主程序流程图如图6所示。

图6 主程序流程
尾轴转速检测调节的软件部分主要是利用PID算法对误差进行比例、积分和微分的运算,并将运算结果作为控制器的输出[5]。在单片机控制中,通常使用的是数字PID,其表达式为:

(1)
船舶主机调速控制系统具有一定的滞后性和非线性,采用增量式PID算法,由式(1)经计算可得:
Δu(k) =u(k)-u(k-1)
=KP[e(k)-e(k-1)]+KIe(k)+
KD[e(k)-2e(k-1)+e(k-2)]
(2)
MSP430单片机控制电路将经过转速检测模块检测的反馈转速对应的电流与调速模块给定的电流相比,计算差值,并将近3次的差值代入到式(2)中,计算得到相应的输出脉宽增量,再经过一定的幅度限制计算就可以求得控制IGBT管的PWM波占空比。系统将该占空比值送入PWM产生程序中,PWM产生程序产生相应的PWM波形。可以通过单片机控制功率开关管的导通和截止调节执行功能块的输入电流,从而精确控制船舶的航行速度。
4 系统性能测试
船舶主机调速系统进行组装后,各个功能运行正常。经过多次试验调整各项参数,调速系统的输出电流在4~20mA近似程线性变化,比例阀位移的控制精度为±1%,可以满足系统的要求,测试结果如表1所示。

表1 测试结果
5 结束语
简要介绍了基于MSP430的船舶主机调速系统的基本原理,以及系统硬件和软件的开发流程。将嵌入式技术以及电-气主机控制技术应用在船舶调速系统,极大地提高了系统的可靠性和实时性,而且具有开发价格低、维护简单的特点,提高了船舶调速系统的自动化程度。此外还引入了PID控制算法,提高了系统的精度。实验结果证明,系统可以达到设计要求,具有比较高的可靠性、稳定性。
[1] 郭远星,施一明,叶莹.船舶综合控制系统研究与设计[J].中国造船,2010(3):191-198.
[2] 李彬,王朝阳,卜涛,等.基于MSP430F149的最小系统设计[J].应用天地,2009(12):74-76.
[3] 张乐峰,张鼎.运算放大器应用技术手册[M].北京:人民邮电出版社,2009.
[4] 李峰,贾存旗,温小飞.船舶主机转速信号采集与无线传输模拟系统的设计[J].造船技术,2012(2):9-12.
[5] 马杰.船舶主机遥控系统的设计与实现[D].大连:大连海事大学,2010.
Research and Design of Ship’s Main Engine Control System
HUANGFeng,ZHOUGuopin,WANGXinxin,YAODawen,LIYang
(College of Information Science and Technology,Nanjing Forestry University,Nanjing 210037,China)
For domestic equipment of our country shipping rate is low, the reliability of the equipment is lower, this article combines the electro pneumatic control and embedded host control to design the core of ship equipment which namely the speed control part.Design of a marine main engine speed control system based on MSP430,this control system can be controlled through the joystick,reduce the speed after the alarm and speed feedback on executive function block after speed detection.This system can control the speed of ship precisely and flexibly that combined with the MSP430control accuracy.After testing,the system has high reliability.
speed control system;MSP430;speed feedback;reliability
2014-03-27
TP23
A
1001-2257(2014)08-0014-04
黄峰(1990-),男,江苏张家港人,硕士研究生,研究方向为嵌入式系统及应用。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
汽车维修与保养(2021年8期)2021-02-16
铁道通信信号(2018年5期)2018-06-28
科技与创新(2017年14期)2017-08-09
汽车维护与修理(2016年10期)2016-07-10
工业设计(2016年4期)2016-05-04
中国氯碱(2015年9期)2015-11-02
小学生·多元智能大王(2015年3期)2015-05-25
汽车维护与修理(2015年6期)2015-02-28
化工自动化及仪表(2015年7期)2015-01-13
