
无信号控制路段行人过街决策行为分析*
2014-09-13 05:55吴立新张宝南
吉林建筑大学学报 2014年1期
吴立新 王 旭 张宝南
(1:吉林建筑大学交通科学与工程学院,长春 130118; 2:吉林省高等级公路建设局,长春 130021)
0 引言
随着城市化进程的加快和机动车数量的迅猛增长,行人穿越道路的需求量不断增加,行人过街设施设计的合理性显得尤为重要.过街天桥、地下通道等将人车彻底分离的设施由于受到环境、造价等因素限制不能广泛采用;人行信号灯由于不能随人流量、车流量变化进行时间间隔的调整,增加了机动车和行人的延误时间,因此,我国目前大量存在着未设置信号控制的行人过街路段.在通过这种过街设施时,驾驶员往往会以自我为中心,没有考虑交通弱者的优先通行,很少有机动车会主动停车甚至减速来避让行人,行人和车辆往往各自寻觅可穿越空挡通过,行人过街的危险性尤为突出.在机动车与行人可能发生的交通冲突过程中,驾驶员与过街行人的决策行为起到至关重要的作用.由于双方行为具有竞争性,可以从博弈论角度分析其行为特性,研究驾驶员和过街行人在冲突对抗条件下,如何选择策略使自己的延误时间最少、事故风险最低.本文通过不同车速下的行车模拟试验,从过街行人角度分析其与驾驶员博弈的决策行为,从而为我国交通管理部门制定既考虑机动车通行能力,又能保障行人安全过街的合理控制方案提供依据.
1 无信号控制路段行人过街特征分析
行人交通的基本特征包括个体特征和行人流的群体特征.与机动车相比,行人个体的交通特征体现在个体之间的速度差异很大,加速和减速活动频繁,较易发生迎面碰撞,有群体行走趋势,在紧张或信息不明的情况下容易出现盲目的行为等方面[1].不同心理特征的行人选择过街方式有所相同,有的行人耐心等待,采取保守方式安全过街;有的行人则不愿意长时间等待而采取危险冒进的过街方式.行人等待时间对其决策行为也会产生较大影响[2],参考日本经验和国内研究成果,如果等待时间超过行人的极限忍耐时间35s[3],行人就会试图寻求可接受间隙,采取危险方式强行穿越.道路交通流特性参数对过街行人的行为影响更为显著,若无信号控制路段的机动车流量较低,前后车辆间距很大,行人穿越机会充足,则无需冒险强行穿越与机动车发生冲突;而当机动车流量较大,前后车间距较小时,行人穿越机会很少,需要寻找合适的机会冒险穿越车道,从而形成了与机动车的博弈.在行人与机动车的博弈过程中,每辆来车的初始速度不同,参与博弈的双方选择的策略也有所不同,理性的过街行人根据自己的判断,评估决策风险的大小,采取最有利于自身的策略——等待或者穿越;驾驶员根据感知风险程度决策自己的行为,选择加速、匀速或者减速三种策略.驾驶员与过街行人行为的交互作用是导致冲突发生的根本原因,由于过街行人对驾驶员的特征、策略空间及收益信息了解不准确,而且都会追求各自利益的最大化,最后达到某种均衡状态,因此双方交互作用的过程就是一个不完全信息条件下的非合作博弈过程[4].
2 行人过街决策行为分析试验方案
影响驾驶员与过街行人决策行为的因素很多,归根结底还是人、车、路、环境四个方面[5].为了排除次要影响因素,试验过程中的驾驶员和行人均为身体健康、反应敏捷的中青年“理性人”,在条件允许情况下会追求利益的最大化,也就是通过判断自身具备穿越条件时,驾驶员或行人会选择穿越,而非避让.通过实地行车试验结果分析过街行人在不同感知风险条件下采取的决策行为.
2.1 试验方案构建
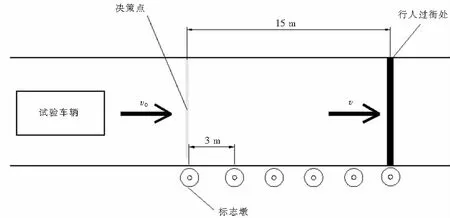
图1 行人决策风险试验区示意图
为了降低试验风险性,试验路段选择长春市净月开发区交通流量较小,道路平直、无交通信号控制,长度满足车辆加减速要求的城市道路路段,在天气良好的白天平峰期进行观测.根据相关研究数据,85 %左右的行人认为车辆行驶到距自身10 m~20 m的距离时,车辆对其安全构成威胁,无法自由穿越[6],因此,试验设定驾驶员需要采取决策的位置与过街行人位置相距15 m(如图1所示).
考虑结果的可靠性和试验的高效性,在试验路段设置5个试验区,每个试验区的末端安排1名过街行人,要求过街行人站在行车道标线一侧,各个试验区相隔百米左右.驾驶员按照试验预定的初始速度驶入第1个试验区的起点,并在驶离后通过调整车速,仍以速度进入下一个试验区.初始速度从20 km/h起始,按步长10 km/h递增至70 km/h.试验完成后,行人报告其决策行为及对试验过程中决策行为的风险程度估计.选择8名驾驶员和5名行人进行行车试验,每位驾驶员与5名行人产生30个博弈数据,获取试验样本量共计240个.
2.2 试验数据分析
对获取的240个试验数据进行整理分析,得到行人感知风险与车辆初始速度、行人决策行为与初始速度和行人感知风险与决策行为的关系.

图2 过街行人感知风险与初始速度关系
2.2.1 感知风险与初始速度
行人过街感知风险的判定采用“不危险”、“不很危险”、“一般”、“危险”和“很危险”五个等级,分别用1~5级表示,随着风险等级升高,危险程度增大.过街行人感知风险与初始速度关系如图2所示.从图2可以看出,当机动车的初始速度在40 km/h以下时,过街行人对风险评估较低,风险度均在3级及3级以下;当初始车速在40 km/h~50 km/h时,过街行人对风险判断差异较大,包含了1级至5级五个变化区间;而当初始车速在50km/h以上时,92%以上的过街行人感到危险或很危险.
2.2.2 决策行为与初始速度
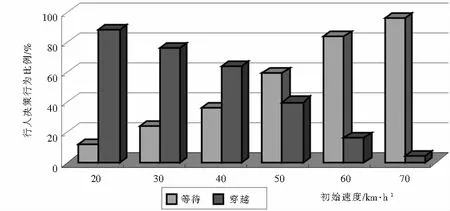
图3 过街行人决策行为与初始速度关系
过街行人的决策行为表现为穿越或等待两种形式,不同初始速度条件下行人的决策行为如图3所示.
从图3看出,当初始车速在40 km/h以下,绝大多数行人会选择穿越.这是由于行人根据经验,虽然不知道驾驶员将采取何种策略,但可以通过穿越的方式迫使驾驶员采取减速措施而使自身优先过街,即使穿越不能完成,行人也有充分时间进行躲避;当车速在40 km/h~50 km/h之间,选择穿越与等待两种行为的比例相差不大;当车速超过60 km/h时,只有不足15 %的行人敢于冒险穿越,而达到70 km/h时,几乎全部选择等待.
2.2.3 感知风险与决策行为
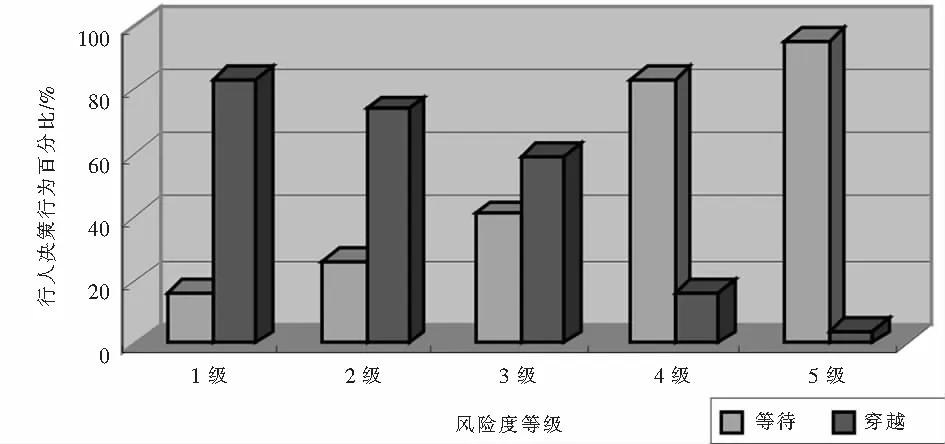
图4 过街行人感知风险与决策行为关系
过街行人在同一风险度情况下采取的决策行为有所不同,感知风险与决策行为的关系如图4所示.
过街行人感知的风险处于“不危险”和“不很危险”级别时,75 %以上的行人会选择穿越;处于“一般”等级时,超过半数的行人仍会选择穿越,但选择等待并观察驾驶员行动后采取决策的行人明显增多.这是由于行人在与机动车博弈过程中处于劣势地位,行人虽然可以通过突然加速的方式强行穿越,逼迫驾驶员采取避让行为,但面临的风险大大增加,因此很多行人采取等待观察策略,确认驾驶员会采取抢行还是避让策略后再做决定,降低了所担负的风险程度;当行人认为“危险”时,只有15 %行人敢于冒险穿越,达到“很危险”程度时,等待比例达到96 %,只有极少数行人敢于冒险穿越.
3 结语
通过实地行车模拟试验,建立了车辆初始速度、过街行人的风险感知度和决策行为之间的关系,发现路段上车辆的行驶速度对行人过街决策行为影响极大.当来车速度低于30 km/h时,过街行人多采取穿越策略;当车速处于40 km/h左右时,过街行人采取等待或穿越策略的比例相差不大;当车速高于50 km/h时,由于风险过高,行人一般不会选择穿越策略.在制定城市道路路段行人过街策略时,通过观测得到的路段车速,综合考虑机动车和过街行人的风险与延误,当路段车辆平均速度区间在35 km/h~45 km/h时,考虑采取施划彩色人行横道线、立体人行横道线等方法对驾驶员进行心理限速;当路段车辆平均速度在45 km/h以上时,应考虑在人行横道前设置限速带、行人过街感应控制信号灯等安全措施,在保证行人能够安全通过的情况下尽可能提高机动车的通行能力,使驾驶员和过街行人的博弈达到收益最大化,从根本上解决安全设施缺失或设置过多、控制措施不当等不合理现象.
参 考 文 献
[1] 李得伟,韩宝明,张 琦.基于动态博弈的行人交通微观仿真模型[J].系统仿真学报,2007,27(19):2590-2593.
[2] 郭宏伟,高自友,赵小梅.基于持续模型的行人过街行为[J].吉林大学学报(工学版),2009,39(2):35-40.
[3] 杨晓芳,韩 印,付 强,马晓旦.无信号控制路段行人过街管理策略研究[J].计算机工程与应用,2009,45(9):204-206.
[4] 李 静,范炳全.基于驾驶员反应行为的诱导博弈分析[J].上海理工大学学报,2003,25(4):398-400.
[5] 杨晓光,劳云腾,云美萍.无信号控制路段行人过街方式适用性研究[J].同济大学学报(自然科学版),2007,35(11):1466-1470.
[6] 李 平. 基于博弈论的行人过街冲突模型研究[D].哈尔滨:哈尔滨工业大学,2011.
猜你喜欢
公民与法治(2022年7期)2022-07-22
中国特种设备安全(2022年1期)2022-04-26
——以呼和浩特市为例
交通工程(2021年1期)2021-03-16
电子制作(2019年24期)2019-02-23
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
黑龙江交通科技(2017年8期)2017-03-03
汽车维护与修理(2015年5期)2015-02-28
武汉理工大学学报(交通科学与工程版)(2012年4期)2012-04-12
