
悬浮子弹降落与悬浮过程弹道特性动力学分析*
2014-09-20 09:27钱建平季溢栋居仙春
弹箭与制导学报 2014年2期
雷 伟,钱建平,季溢栋,居仙春
(南京理工大学机械工程学院,南京 210094)
0 引言
悬浮弹系统是一种新型的“被动式”防御武器,它是一种屏障式武器,可以构筑有效的防御系统。我国对悬浮装置的结构、气囊空中充气技术以及悬浮弹空中姿态有相关研究[1-2]。文献[3]提出了一种驱动旋翼的方法使悬浮弹达到悬浮。
文中采用旋翼结构,通过对悬浮子弹的工作过程研究,包括母弹开舱抛撒、无翼惯性下降、旋翼张开无动力驱动惯性下降、有动力驱动旋翼减速至稳定悬浮等阶段,并结合算例进行数值分析得到最佳的驱动方式和驱动力矩。
1 概述
1.1 弹道特性
根据悬浮子弹的工作过程将悬浮子弹的弹道分为4个阶段,如图1所示。悬浮子弹经母弹开舱自由下落段(Ⅰ),减速减旋段(Ⅱ)可分为两种方式:开翼立即驱动至稳定悬浮(Ⅱ-a);先开翼无动力驱动惯性下降(Ⅱ-b1)再有动力驱动至稳定(Ⅱ-b2),稳定悬浮段(Ⅲ),有翼惯性下降无动力驱动段(Ⅳ)。并将开始有动力驱使至稳定悬浮的时间称为过渡时间,即Ⅱ-a和Ⅱ-b2段所用时间。悬浮子弹经过渡段到达稳定悬浮(Ⅲ)构筑防御屏障,这也正是其与普通子母弹的最大区别。

图1 弹道特性示意图
1.2 结构特性
悬浮子弹由旋翼、驱动装置和弹体三部分组成,如图2所示。旋翼与驱动装置之间以及驱动装置与弹体之间的连接分别称作轴承1和轴承2。为了使弹体更好的减旋,下文中会在某一弹道阶段采取旋翼与驱动装置、驱动装置与弹体固结在一起的形式(即不产生相对转动),分别称作轴承1、2固联,不固结在一起称作轴承自由(不固联)。由于驱动装置与弹体之间的转速不同,将驱动装置与弹体分别看作刚体1和刚体2采用两刚体建模能够更好的模拟真实情况。

图2 悬浮弹结构及坐标示意图
2 旋翼下降过程动力学模型
2.1 旋翼展开后无动力驱动时力学模型
由于悬浮子弹从母弹抛出后有很高的迎面速度,产生相对翼片自下而上的相对气流,其速度大于旋翼的诱导速度。相对气流U自下而上斜向指向桨叶,叶素来流角为负值。因叶素所产生的升力Y与相对气流合速度U垂直,所以叶素的升力Y向前倾斜,在旋转面上的分力Qy指向前方,起拉着旋翼继续旋转的动力作用;而空气阻力X形成的旋转阻力Qx起阻止旋翼旋转的作用。当旋翼各片桨叶的Qy和Qx取得平衡时,旋翼就能在自下而上的相对气流作用下保持稳定自转,如图3所示。
叶素上的相对气流速度U可表示为:


图3 叶素在下降状态下的受力分析
式中:UT、UP分别为桨叶剖面的切向速度和轴向速度;Ω、r为桨叶旋转速度和桨叶剖面径向位置;Vc、vi分别为旋翼浆盘迎流速度和与之对应的诱导速度,此时在高下降率的情况下,经典的动量理论不再成立[4]。
这样,叶素上的升力Y和阻力X有:

式中:Cl、Cd为升力系数与阻力系数[5]。来流角ε和攻角α可分别表示为(向上为正),α=θ-ε,θ为叶片安装角,c为桨叶当地弦长。则微元为拉力:

微元阻力矩:
因此,得出了悬浮子弹从母弹抛撒出后无动力驱动时展开旋翼,旋翼转速的变化规律:

式中:J为旋翼的转动惯量;Mk为旋翼对驱动装置的反作用力矩。直至Qy和Qx相等时,旋翼稳定自转。将式(4)代入式(1)~式(3)便能得到无动力驱动时的升力T(t)。
2.2 旋翼有动力驱动时力学模型
旋翼开始有动力驱动时,输入转矩会给定一扭矩M。接下来分两种情况:
1)Vc>vi时,Qy和Qx的方向仍然相反,输入力矩为了使旋翼加速,此时与Qy方向一致。旋翼的转速随时间变化:

随着转速与提升力的增加,悬浮子弹下降速度势必会逐渐减小,直至出现Vc≤vi时,ε由负值变为正值,力矩方向随之发生变化。
2)Vc≤vi时,Qy和Qx的方向相同,有:

至此,已经得到了完整的旋翼下降过程力学模型,接下来建立悬浮子弹刚体弹道模型。
3 悬浮子弹两刚体外弹道模型
3.1 坐标系的建立与变换
首先建立地面惯性坐标系O-X0Y0Z0,原点O为悬浮弹子弹抛撒点的地面投影点,OX0轴水平沿射向,OZ0轴铅直向上,OY0轴由右手法则确定;驱动装置固连坐标系O1-X1Y1Z1,原点O1为驱动装置质心,O1Z1在铅直面内指向弹顶,O1Y1在铅直面内垂直于O1Z1轴,O1X1由右手法则确定;弹体固连坐标系O2-X2Y2Z2,原点O2为弹体质心,各轴与O1-X1Y1Z1系平行;弹体基准坐标系O2-X0Y0Z0,原点O2为弹体质心,各轴与O-X0Y0Z0系平行。各坐标系如图2所示。
坐标变换只需考虑两组变换即可。O2-X0Y0Z0与O2-X2Y2Z2之间可由3个欧拉角:进动角ψ2,自转角φ2,章动角θ2转换而来,转换矩阵用[ ]A 表示如下。O2-X2Y2Z2与 O1-X1Y1Z1之间只是坐标原点移动O2O1,故转换矩阵同样可用[]A 表示。另外有:[]A-1=[ ]AT。

3.2 运动方程的建立
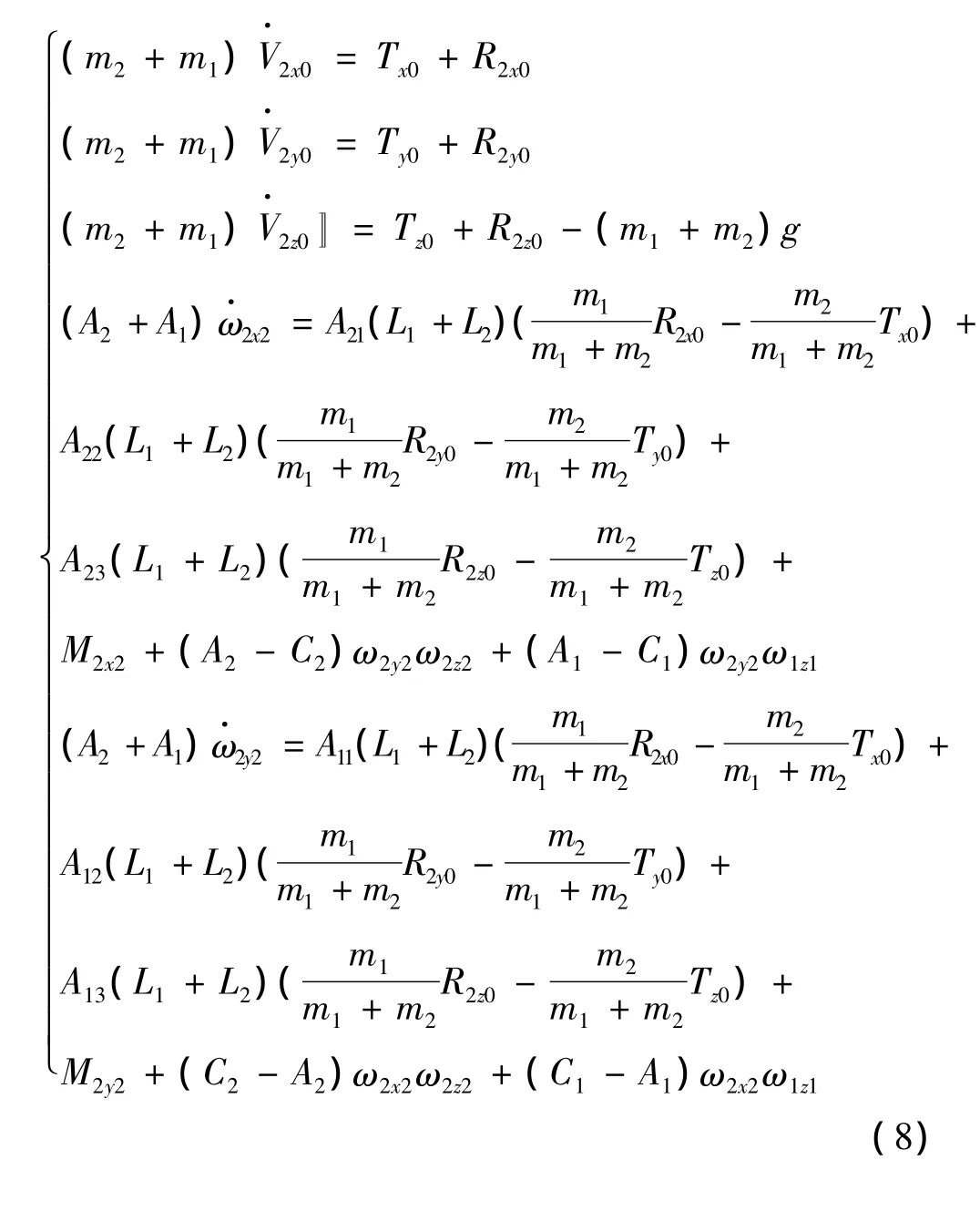
通过对各刚体所受力、力矩的分析,将所有的力投影到 O-X0Y0Z0坐标系上,所有的力矩投影到O2-X2Y2Z2坐标系上得:
轴承1、2之间的关系得到方程:
式(8)、式(9)中:下标带有 xi、yi、zi表示通过坐标变换投影到O-XiYiZi(i=0,1,2)坐标系中;m1和m2、A1和A2、C1和C2分别为驱动装置刚体与弹体刚体的质量、赤道转动惯量、极转动惯量;L1和L2分别为O1D和O2D的距离;T为旋翼的拉力;R2为弹体所受的空气动力,包括阻力Rx2、升力Ry2和马格努斯力;M2为弹体所受的空气动力矩,包括弹体的极阻尼力矩Mxz2,静力矩Mz2,赤道阻尼力矩Mzz2
[6];Mf1和Mf2分别为轴承 1、2的摩擦力矩,有:Mf=f0(vn)2/3d3m,dm为轴承平均直径,f0为考虑轴承结构和润滑方法的系数,n为轴承连接体之间相对转速,v为润滑剂的运动粘度;Mk为旋翼的反扭矩,由旋翼的力学模型中可得到。
3.3 四元数法替代欧拉角
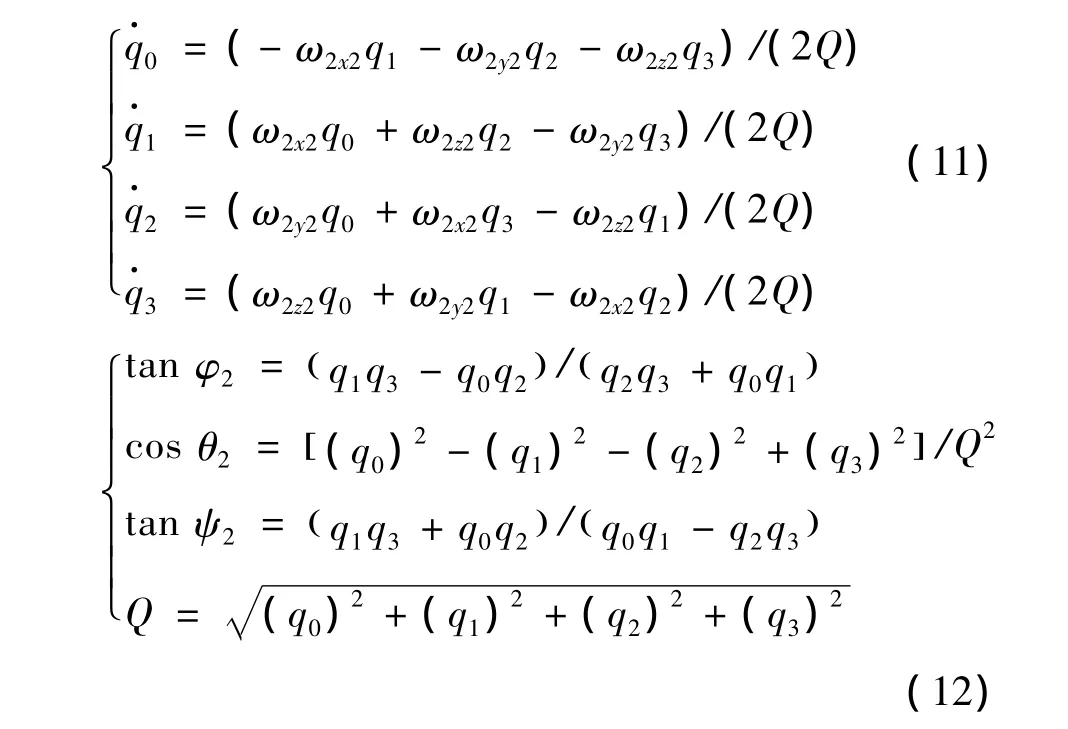
欧拉角之间的关系:

由于欧拉角的表示方法在计算中容易出现奇点而停止运算,文中采用四元数法替代欧拉角[7]:
至此,已经得到了完整的旋翼下降过程力学模型和悬浮子弹刚体弹道模型,将旋翼力学模型中的T(t)、Mk代入弹道模型中便能得到悬浮弹的弹道轨迹。
4 初始参数
子弹出舱参数:母弹存速300 m/s,抛撒速度40 m/s,弹道倾角60°,子弹出舱转速10 000 r/min,开舱高度1 000 m。
空气密度 ρ=ρon(1 -2.19 ×10-5h)4.4016,其中 ρon=1.293 kg/m3为地面空气密度,h为高度的变化。其他参数如表1所示。

表1 弹型与翼型相关参数
采用VB编写仿真程序,以时间为自变量利用四阶龙哥库塔法对Ⅰ、Ⅱ、Ⅲ段弹道方程进行数值计算分析。
5 只开翼,不驱动分析
在给定的初值条件下,子弹从母弹抛出后,让其自由下落,7.6 s便已落地,落地时的z方向速度(下称落速)仍然有94.5 m/s,弹体转速仍然有84.5 r/s。
图4、图5是3种固联方式下高度和弹体转速随时间变化曲线。可以看出,固联方式的不同对弹体减速效果以及落地时间差别并不大,但对弹体减旋的效果影响却很大。

图4 时间-高度 图5 时间-弹体转速
考虑到弹体一直处于高速旋转状态对结构的要求会更高,三种固联方式对减速效果几乎相同的情况下(落地时间分别为 19.03 s、19.66 s、19.76 s)采用轴承1、2都固联相对于其他两种方式在弹体减旋上效果更好。因此,综合考虑此阶段采用轴承1、2都固联的方式是最佳的。
6 驱动旋翼分析
6.1 确定最佳驱动方式
由于此时旋翼已经驱动,轴承1必须自由。假定悬浮子弹在150 m必须进入稳定悬浮阶段(落速小于10 m/s)。按照驱动方式的不同将其分为直接驱动(Ⅱ-a)和先开翼减速减旋一段时间再驱动(Ⅱ-b1+Ⅱ-b2)两种方式。首先给定正好能够克服悬浮子弹自身重力的驱动力矩,取M=0.056 N·m。
图6是在轴承2不固联情况下两种驱动方式高度随时间变化的对比。可以看出,Ⅱ-b的曲线全部在Ⅱ-a曲线之上,这说明先开翼后驱动的方式能够滞空的时间更长一些;图7是弹体转速随时间的变化曲线,显然先开翼后驱动的方式对弹体的减旋效果比较好,而且对比2轴承的固联方式可以看出,2不固联的方式能够在驱动旋翼以后弹体仍然保持减旋状态,当2固联时由于驱动旋翼以后旋翼的转速大于弹体的转速,致使它们之间的摩擦力矩仍会给弹体一个加速旋转的作用。

图6 时间-高度 图7 时间-弹体转速
综合以上对比,采用先开翼减速减旋一段时间,此时1、2都固联,然后再使1、2都不固联驱动旋翼是最佳的驱动方式。此方式能够更快的减速,弹体能够更好的减旋,而且有更长的滞空时间。但是无论哪种驱动方式过渡时间都很长。因此,需要通过增大驱动力矩的方法来减少过渡时间。
6.2 确定最佳驱动力矩
由于需要悬浮子弹在一定的驱动能量下,更长时间的处于悬浮段才能更有效的构筑防御屏障。因此,通过增加驱动力矩的方法减小过渡时间是必要的。采取上述确定的最佳驱动方式,对比1.2M、1.4M、1.6M、1.8M、2.0M、2.2M(M 是克服自身重力所需要的驱动力矩,M=0.056 N·m)时的弹道模型。
表2是800 m开翼高度不同驱动力矩(M的倍数)下所用过渡时间表,图8是过渡时间随驱动力矩增大的变化曲线。

表2 800 m开翼不同驱动力矩下过渡时间(s)

图8 驱动力矩倍数-过渡时间
可以看出,虽然随着驱动力矩的增加过渡时间在减小,但属于一个慢慢进入平缓的过程,在1.8倍之后基本进入水平阶段。然而在一定能量的情况下,驱动力矩越大能够驱动的时间也就越短。另外,悬浮弹在以大于M的驱动力矩减速到达悬浮段后必须有一个减小驱动力矩至M的过程,否则悬浮子弹会继续上升。越大的驱动力矩减小至M对结构的要求也会越困难。综合考虑过渡时间、一定能量下能够产生的驱动时间以及对结构的要求,选取1.4~1.8M之间驱动减速是最合适的。
7 结论
1)悬浮子弹在展开旋翼未驱动的情况下比自由下落子弹能够延长11.5 s左右落地,此时的最佳开翼方式是轴承1、2都固联的方式。
2)给出了悬浮子弹的最佳驱动方式是:先轴承1、2都固联减速一段时间再轴承1、2都不固联驱动旋翼。此驱动方式能够更快的减速,弹体能够更好的减旋而且有更长的滞空时间。
3)给出最佳的驱动力矩是刚好能够克服自身重力所需力矩的1.4~1.8倍之间,此时的过渡时间在4.5 ~6.5 s之间。
[1]闫红红,胡勇,张亚.空中悬浮装置的结构设计[J].机械工程与自动化,2009(3):155-156.
[2]钱立志,陶声祥,刘玉文.利用弹道方程计算悬浮弹射击诸元[J].火力与指挥控制,2008,33(7):19-21.
[3]胡西博,钱建平,季溢栋,等.涡轮驱动悬浮装置动力特性分析和试验[J].四川兵工学报,2013,34(3):21 -25.
[4]曹栋,曹义华.垂直下降状态下的旋翼三维流场数值模拟[J].北京航空航天大学学报,2012,38(5):641-647.
[5]李振波,陈佳品,张琛.低雷诺数四旋翼飞行器升力分析与计算方法研究[J].中国机械工程,2005,16(7):249-251.
[6]袁子怀,钱信芳.有控飞行力学与计算机仿真[M].北京:国防工业出版社,2001.
[7]杨启仁.子母弹飞行动力学[M].北京:国防工业出版社,1999.
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10
小哥白尼(趣味科学)(2022年3期)2022-06-09
新技术新工艺(2022年3期)2022-04-02
爆炸与冲击(2022年2期)2022-03-17
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
电子制作(2019年7期)2019-04-25
北京航空航天大学学报(2016年8期)2016-11-16
制导与引信(2016年3期)2016-03-20
