有限观测下的结构损伤实时在线诊断
2014-09-20 02:57雷鹰,周欢
振动与冲击 2014年17期
雷 鹰,周 欢
(厦门大学 建筑与土木工程学院,福建 厦门 361005)
近年来,基于结构振动数据的系统辨识和损伤识别方法的研究受到了广泛的关注,产生了许多识别理论与方法[1-6]。当灾害发生时,通过观测的数据对结构的损伤进行实时的诊断显得越来越重要。目前,在时域范围内,对因结构损伤产生的结构参数改变的实时识别主要通过在最小二乘法或者卡尔曼滤波方法中引入一个常数遗忘因子[7-8],但是用这种方法识别的结果跟遗忘因子大小有关,遗忘因子越小,追踪能力比较好,但是对噪声比较敏感,若遗忘因子较大,接近于1,识别结果虽然对噪声不很敏感,但是追踪能力又不好。Yang和Lin等在文献[9-12]中提出了一个基于最小二乘算法的自适应追踪方法来识别多层剪切框架的损伤情况,但是需要对结构的速度,位移和加速度进行全观测,在实际的工程中很难实现。本文作者提出了在部分观测结构响应的情况下,基于扩展卡尔曼滤波/预测对剪切框架和大型结构的损伤诊断的方法[13-15],但这些方法不能应用于对结构损伤的实时诊断。Yang等[16]又提出了基于扩展卡尔曼滤波算法的自适应追踪损伤的方法,只需对加速度部分观测,用一个遗忘因子矩阵代替单个的遗忘因子来进行损伤识别。但自适应因子矩阵存在较繁琐与多解等问题。
本文研究一种基于扩展卡尔曼滤波的结构损伤实时诊断算法,在外荷载已知的情况下,该方法只需要对加速度进行部分的观测,就能够达到实时地追踪结构参数以及诊断其损伤。通过对比观测加速度与预测加速度,可以判断出结构损伤的时间以及可能发生损伤的位置,再通过一个优化函数,对可能损伤的刚度进行优化,以减少两个加速度之间的误差,从而达到对损伤的位置以及程度的识别。
1 损伤诊断算法
对于m个自由度的结构的动力方程可以表示为:

其中:x(t)是 m维的位移向量。M表示质量矩阵,Fc[,θ]和Fs[x,θ]分别为耗散力和恢复力向量。f表示外部激励,B为力的位置矩阵。
本文提出的损伤实时诊断算法共分为三个阶段。
1.1 第一阶段
第一阶段是识别结构的未知参数。由于扩展卡尔曼滤波算法需要一定的时间才能收敛,因此第一阶段是算法本身的收敛阶段,可以认为结构的参数是不变的,即损伤不会发生在此阶段。
引入一个2m+n维的向量:

其中:x是位移向量是速度向量,θT是n个未知的结构参数。动力方程(1)可以被写成以下形式,

通常情况下,结构的加速度只能部分观测到。因此扩展卡尔曼滤波中的观测方程可以表示为

其中:h(Xk+1,fk+1)=DM-1[-Fcx,θ)-Fs(x,θ)+Bf],yk+1是观测向量,D是和加速度传感器放置位置有关的矩阵。vk+1为测量噪声。
通过扩展卡尔曼滤波,可以得到t=(k+1)×Δt时刻的扩展状态向量:

其中^k+1k是 Xk+1在 t=k×Δt时刻的估计值,Kk是卡尔曼增益矩阵。

1.2 第二阶段
在第一阶段结构的状态和物理参数收敛后,就是判断结构刚度突变的时刻,以及可能发生损伤的位置。
结构某一层的损伤,会对安置在相邻两层的加速度响应产生瞬时影响,但对较远的加速度响应,影响则晚一点。如图1所示,数值模拟n层剪切框架,受到一个顶部白噪声的荷载作用结构第i层刚度在第2.5 s突然发生了损伤。结构的每层的刚度和质量都相同,为ki=12 kN/m,mi=60 kg(i=1,2,…,n),阻尼为黏滞阻尼 ci=200 Ns/m。图2(a)~2(d)是数值模拟得到的损伤附近层的楼层加速度响应在损伤前后时程变化与结构不发生损伤情况的楼层加速度响应时程的对比。

图1 n层剪切框架Fig.1 An n-story shear building

图2 损伤位置附近楼层加速度变化Fig.2 Deviations of floor acceleration responses near locations of structural damage
可以看出,在第2.5 s的突变只影响到了和,而和则与无损时相比没有明显的变化,因为i层的刚度损伤需要一定的时间才能对其他层产生影响。对于多层剪切框架,加速度传感器从第一层开始隔层放置,这样就可以确保每一层的损伤,都能被观测到。
第t=(k+1)×Δt时刻,加速度的误差可以表示为:

yi,k+1表示(k+1)×Δt时刻的观测加速度是t=kΔt时刻预测的加速度,由下式算出:

结构的损伤不能发生在结构参数识别收敛之前,否则该算法不能对损伤情况进行诊断。定义时刻t=(k+1)Δt的加速度误差平方和为:

其中:i表示加速度传感器放置的楼层位置。m为放置的传感器个数。

δ表示稳定后得到的加速度差平方和的最大值。由图2(a)~(d)可知,结构的第 i和 i+1层可能发生了损伤。
1.3 第三阶段
第三阶段通过优化处理,来识别出结构刚度损伤的具体位置和损伤的程度。
假设:

Δθi,Δθi+1为待识别的结构刚度参数的变化。利用MATLAB中的优化函数FMINCON,该函数的作用是使目标函数取得最小值,将修正过的θ′=θ-Δθ代入到扩展卡尔曼滤波算法中,循环之前的计算过程。
目标函数定义成以下的形式:

其中:j表示可能损伤的单元,p为可能损伤单元的总数。
约束函数定义为:
以上的优化问题需要对每个可能损伤的单元进行单独的优化。优化的过程是不断代入可能的刚度损伤的位置和程度,使得目标函数最小,因为只有真实的刚度损伤值才能符合观测值与预测值相等,这样就可以得到准确的损伤的位置和损伤的程度。然后再实时的更新结构的刚度参数,以便能对结构的参数进行连续的识别追踪。
地方自媒体已然成为县级媒体建设中的活跃者,在两微一端平台发展迅速。以微信公众号为例,某些县甚至出现了百个城市的地方自媒体内容矩阵公司,地方自媒体的高速发展获取了相当一部分内容流量和本地商机。互联网公司最近几年普遍尝试下沉到四五线城市,下沉效应带来用户数量的快速上升,这将无可避免地对传统媒体格局造成巨大冲击。2014年以来的微博用户月活超过4亿,2018年快手用户日活过亿,这些用户很大程度上来自下沉县级市场的小镇青年。鲜活的案例与庞大的数字无不昭示着一批蓄势待发的潜力受众,势必在县级融媒体建设进程中扮演着至关重要的角色。
2 数值算例
本文采用的是一个四层的剪切框架模型,如图3。
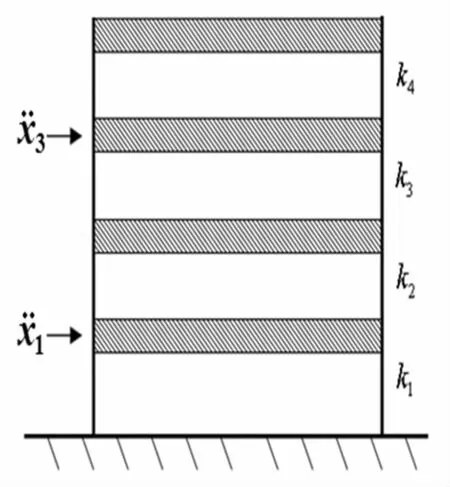
图3 四层剪切框架及部分加速度观测Fig.3 A four-storey shear building with partial accleration observations
结构的各个参数分别为:m1=3 452 kg,m2=m3=2 652 kg,m4=1 810 kg,k1=k2=k3=k4=67 900 kN/m,c1=c2=c3=c4=54.3 kN·s/m。结构的质量已知,加速度和外荷载可以通过观测得到,加速度传感器放置在结构的第一层和第三层。所以需要识别的未知量为以下几个量:X=[x1,…,x4,x1,…,,k1,…,k4,c1,…,c4]T。通过上面介绍的扩展卡尔曼滤波的算法和损伤追踪监测的方法,就可以识别出结构的刚度和阻尼,以及刚度因损伤产生的突变。
假设,结构第一层刚度在第2.5 s发生突变,此时k1从67 900 kN/m降到了40 000 kN/m。用本文提出的方法对结构损伤进行实时诊断,假设观测加速度受到10%的白噪声影响。数值模拟的过程及结果如下。
第一阶段:用扩展卡尔曼滤波识别系统的时不变参数。假设算法在1 s之后趋于稳定。

图4 观测与计算估计加速度误差平方和Fig.4 Sum of quadratic errors between observed and predicted accelerations
第二阶段:判断损伤发生的时间以及可能的位置。

图5 突变时各观测层加速度误差平方Fig.5 Quadratic errors of each observed and predicted acceleration at the time of abrupt change
通过对图4的分析,可以发现,第2.5 s结构的加速度误差平方和发生突变,远远超过了1 s稳定之后的最大值,说明结构的某一位置发生了某种损伤。图5则说明突变主要是由第一层加速度误差产生的,所以可以判断出可能发生损伤的位置为第一层和第二层。
第三阶段:确定损伤的程度以及准确的位置。
根据目标函数可以确定损伤的位置和大小。图6~图9是各层刚度的收敛图,据此可以得出本文中提出的基于扩展卡尔曼滤波的结构损伤实时诊断的算法,可以准确的判断出刚度突变的时间,并且能够计算出突变的位置和突变的程度。

图6 第一楼层刚度随时间变化的识别Fig.6 Identification of time-variant k1
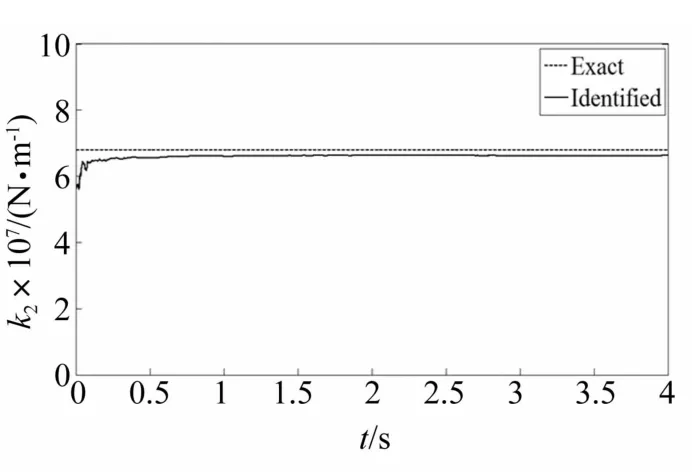
图7 第二楼层刚度随时间变化的识别Fig.7 Identification of time-variant k2

图8 第三楼层刚度随时间变化的识别Fig.8 Identification of time-variant k3
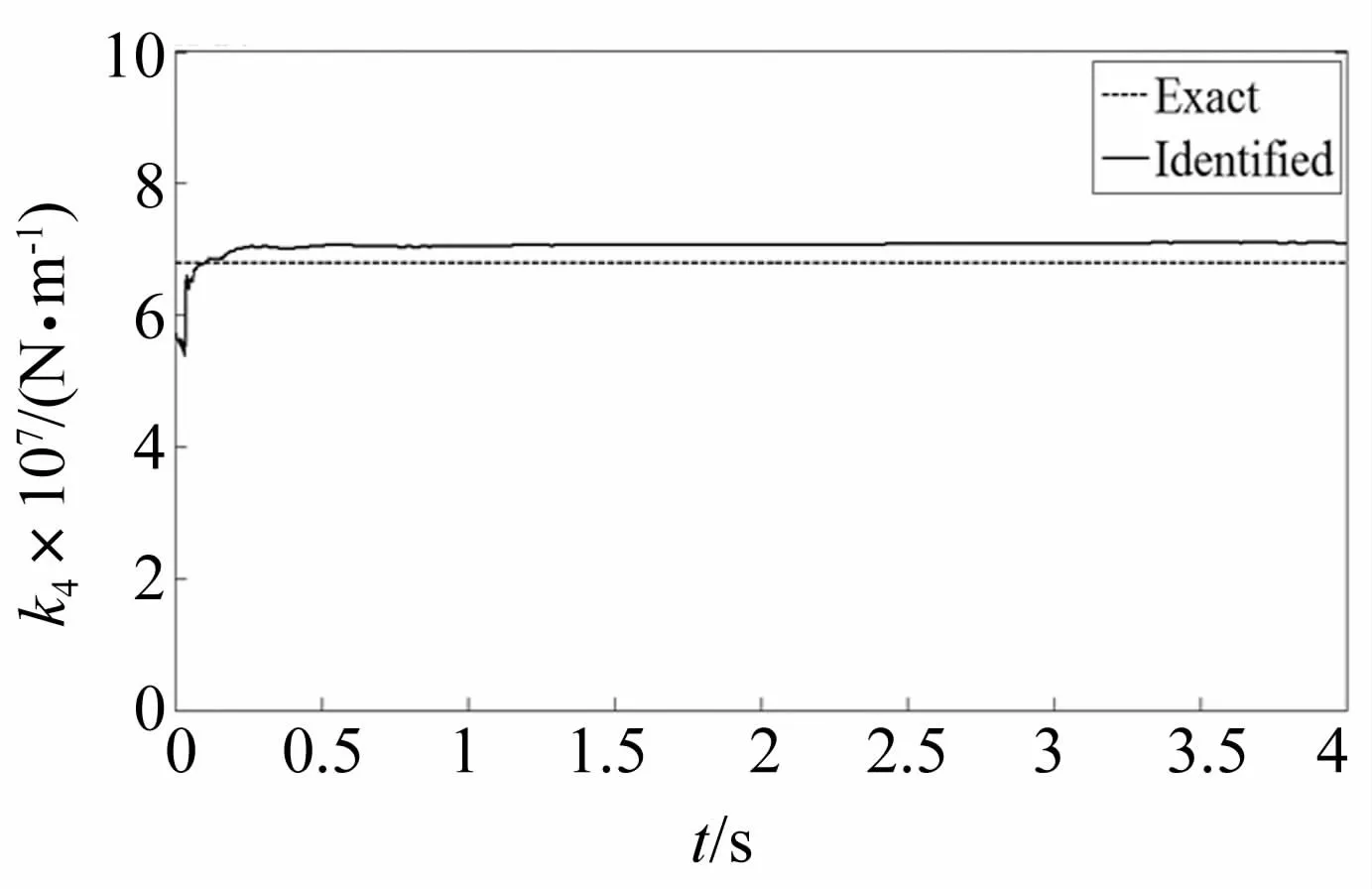
图9 第四楼层刚度随时间变化的识别Fig.9 Identification of time-variant k4
3 实验验证
实验验证采用的是由台湾大学的Weng等[17]在台湾地震研究中心做的三层钢框架结构损伤实验数据。如图10所示,该结构底面积为3 m×2 m,层高3 m,梁柱节点为螺栓连接。一个锁定系统用V形支撑安置在第一层框架上,在外界底部激励作用下该锁定结构可以在任何瞬间释放,用来模拟楼层刚度的突然变化。整个结构放置在一个大型的振动台上,其可以提供底部作用力。
地震作用下,结构的运动方程可以写成:


图10 第一层带有锁定系统的剪切框架Fig.10 Shear frame with lock-up system in the 1st floor

图11 各时刻加速度误差平方和Fig.11 Sum of quadratic errors between observed and predicted accelerations
其中:m1=m2=m3=6 000 kg,无锁定系统的框架自振频率为1.07 Hz,3.17 Hz和4.97 Hz,相对应的阻尼比为3.85%,0.01%和0.83%,无锁定结构的待识别楼层刚度为 1 568 kN/m(第一层),1 531 kN/m(第二层),1 616 kN/m(第三层)。对于加强刚度的结构(在第一楼层安装锁定系统),楼层刚度为3 137 kN/m(第一层),1 515 kN/m(第二层),1 568 kN/m(第三层)。振动台提供峰值为0.15 g的地面激励。在t=16.35 s将锁定结构释放即该刚性元件和第一楼层断开连接,用来模拟第一楼层突然出现刚度损伤。对结构的第一层和第三层的加速度进行观测,计算结果如图11~图15所示。

图12 突变时各观测层加速度误差平方Fig.12 Quadratic errors of each observed and predicted acceleration at the time of abrupt change

图13 第一楼层刚度随时间变化的识别Fig.13 Identification of time-variant k1

图14 第二楼层刚度随时间变化的识别Fig.14 Identification of time-variant k2
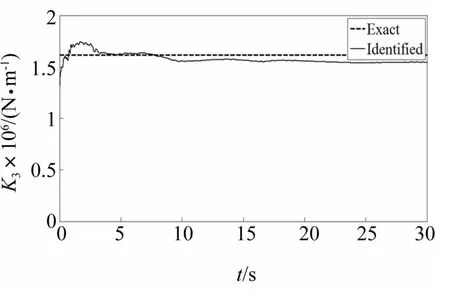
图15 第三楼层刚度随时间变化的识别Fig.15 Identification of time-variant k3
通过以上这些图可得,结构的第一层刚度在16.35 s发生突变,突变程度与真实情况比较符合。综上可得本文提出的基于扩展卡尔曼滤波的实时损伤诊断的算法,可以在部分观测的基础上较准确地判断出突变时间,同时计算出突变的位置和突变的程度,比较好地满足实验结果。
4 结 论
本文提出了一个基于扩展卡尔曼滤波的结构损伤实时诊断的方法用来识别结构的参数以及诊断其损伤。结构的损伤首先会对其相邻两层的加速度产生影响,基于该加速度的变化,文中提出一个优化函数,通过对结构的刚度参数进行优化,来使得预测加速度与观测加速度之间的误差最小,进而实现对损伤的追踪。通过对比已有文献提出的算法,可以看出在对加速度部分观测的基础上,本文中提出的算法,对刚度进行实时追踪,原理清晰明了。数值模拟和实验的结果表明提出的方法具有较好的准确性和稳定性来识别损伤。但该算法对于相邻两层的刚度同时损伤、对其他较复杂线性结构、非线性结构等情况的实时损伤识别,都还有待于后续更深入的研究。
[1]Bisht SS,Singh M P.Detecting sudden changes in stiffness using high-pass filters[J].Structural Control& Health Monitoring,2012,19(3):319-331.
[2] Chu S Y,Lo S C.Application of real-time adaptive identification technique on damage detection and structural health monitoring[J]. Structural Control and Health Monitoring,2009,16(3):154-177.
[3]Huang C S,Huang S L,Su W C,et al.Identification of time-variant modal parameters using Time-Varying Autoregressive with Exogenous Input and low-order polynomial function[J]. Computer-Aided Civil and Infrastructure Engineering,2009,24(7):470-491.
[4]Loh C H,Huang S G.On-line physical parameter estimation and damage detection with adaptive Kalman filtering approach,Structural Health Monitoring 2007:Quantification,Validation,And Implementation,Vols 1 and 2:Structural Health Monitoring(SHM),2007:2023-2030.
[5]Smyth A W,Masri S F,Kosmatopoulos E B,et al.Development of adaptive modeling techniques for non-linear hysteretic systems[J].International Journal of Non-Linear Mechanics,2007,37(8):1435-1451.
[6]Shi Z Y,Law SS,Xu X.Identification of linear time-varying MDOF dynamic systems from Excitation using Hilbert transform and EMD method[J].Journal of Sound and Vibration,2009,321(3-5):572-589.
[7]Lin JW,Betti R.On-line identification and damage detection in non-linear structural systems using a variable forgetting factor approach[J].Earthquake Engineering and Structural Dynamics,2004,33(4):419-444.
[8]Smyth A W,Masri S F,Kosmatopoulos E B,et al.Development of adaptive modeling techniques for non-linear hysteretic systems[J].International Journal of Non-Linear Mechanics,2002,37(8):1435-1451.
[9]Yang JN,Lin S.Parametric identification of structures using an adaptive tracking technique[C].Proceedings of the 16thASCE Engineering Mechanics Conference,Seattle,2003,CD ROM.
[10]Yang JN,Lin S.On-line identification of nonlinear hysteretic structures using an adaptive tracking technique[J].International Journal of Non-linear Mechanics,2004,39:1481-1491.
[11] Yang J N,Pan S,Lin S.Identification and tracking of tructural parameters with unknown excitations[J].Proceedings of the 2004 American Control Conference,30 June-2 July,Boston,MA,2004,5:4189-4194.
[12]Yang J N,Lin S.Identification of parametric variations of structures based on least square estimation and adaptive tracking technique[J].Journal of Engineering Mechanics(ASCE)2005,131(3):290-298.
[13]雷鹰,倪萍禾,刘朝.有限观测绝对加速度响应下剪切框架在未知地震作用下损伤诊断[J].振动与冲击,2012,31(6):96-99.LEI Ying, NI Ping-hu, LIU Chao. Structural damage detection of a shear building under unknown earthquake excitation with limited observations of absolute acceleration reponses[J].Vibration and Shock,2012,31(6):96-99.
[14]雷鹰,毛亦可.部分观测下基于子结构的大型结构损伤诊断法[J].工程力学,2012(7):180-185.LEI Ying, MAO Yi-ke.A distrubuted damage detection algorithm for large size structures under limited input and output measurements[J].Engineering Mechanics,2012(7):180-185.
[15]Lei Y,Jiang Y Q,Xu Z Q.Structural damage detection with limited input and output measurement signals[J].Mechanical Systems and Signal Processing,2012(28):229-243.
[16]Yang J N,Lin S,Huang H,et al.An adaptive extended Kalman filter for structural damage identification[J].Structural Control and Health Monitoring,2006,13:849-867.
[17]Weng J H,Loh C H.Recursive subspace identification for on-line tracking of structural modal parameter[J].Mechanical Systems and Signal Processing,2011,25(8):2923-2937.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
青少年科技博览(中学版)(2021年9期)2021-12-21
探索科学(学术版)(2021年5期)2021-06-08
矿产勘查(2020年11期)2020-12-25
航空发动机(2020年3期)2020-07-24
模具制造(2019年10期)2020-01-06
电子制作(2019年23期)2019-02-23
读者(2019年2期)2019-01-05
中国特种设备安全(2018年10期)2018-12-18
北京航空航天大学学报(2017年9期)2017-12-18