
便携式超宽带穿墙成像雷达阵列模式性能研究
2014-12-18 11:39胡锡坤朱国富
电子科技 2014年9期
胡锡坤,朱国富,金 添
(国防科学技术大学电子科学与工程学院,湖南长沙 410073)
TWIR可对建筑内部情况进行成像,在反恐维稳、抢险救灾中有较大的应用需求。在穿墙成像中,UWB技术因其具有很高的距离向分辨力和较好的穿透性能,获得了越来越多的关注[1]。
在过去的数年中,多种不同种类的UWB、TWIR被研发出来,包括车载[2-3]、便携式[3]、机器人式[3-5]、分布式[3]等。便携式TWIR外形紧凑,部署时不受地形限制,是研究的热点。一般来说,TWIR的成像能力主要依赖合成孔径雷达(SAR)[6]技术和阵列技术[2-3]。SAR为了获取较大的合成孔径,天线需要运动较长的距离,同时对天线运动位置精度要求高且探测积累时间长。因此大多数便携式TWIR采用阵列天线技术。阵列天线技术将足够数量的收发天线组合得到的距离测量进行互相关处理,在目标位置处产生干涉图像。但是UWB、TWIR的工作频段较低,决定了天线尺寸较大,进而导致便携式TWIR不可能采用过多的天线。
因此,便携式TWIR设计面临着如何充分利用有限的天线阵元获取最优成像性能的难题。在TWIR中,常用的阵列模式有3种:顺序收发(STR),顺序单发多收(SSIMO)[3]和多发多收(MIMO)[2]。在 STR 模式中,每个天线依次完成信号的发射和接收;在SSIMO模式中,雷达阵列端到端的扫描,每次均是一个天线发射,余下天线接收;在MIMO模式中,位于两端的天线分别发射,所有的天线(包括发射天线)均进行接收。本文使用4个天线组成的一维线阵,研究3种阵列配置模式的成像性能,并比较了其成像的方位向分辨率和IR。
1 雷达阵列参数
UWB、TWIR得益于其高距离向分辨率和良好的墙壁穿透性能。高距离向分辨率是由其较大的带宽获得的。通常有两种方式获取大带宽的信号:冲击脉冲和步进频连续波(SFCW)。冲击脉冲需要很高速率的A/D转换,而SFCW对瞬时采样宽带要求较低,因而大幅降低了硬件成本和实现难度。因此本文采用SFCW作为发射信号。良好的墙壁穿透性能是由于雷达工作频段较低。文献[7]指出2 GHz以下的电磁波能够穿透大多数常见的墙壁。因此本文采用500 MHz~2 GHz频段的SFCW。
为了有效地将SFCW信号辐射出去,如图1(a)所示,设计了Vivaldi天线。Vivaldi天线是一种平面天线,因而天线阵列可以方便的折叠和伸展,提高了雷达的便携性。然而如图1(a)所示,Vivaldi天线的尺寸较大,出于便携性的考虑,阵列可采用的天线数量不多。因此,如图1(b)所示,采用4个Vivaldi天线,组成了一个一维线阵。
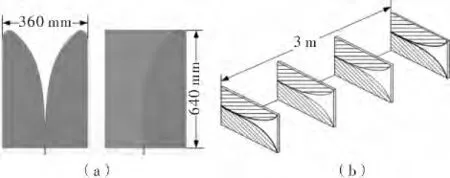
图1 Vivaldi天线和线性阵列
雷达采用后向投影(BP)[9]成像算法,其基本思想是依据成像几何计算的传播时延,相干叠加回波数据。该算法实现简单、成像精度高。
2 收发模式比较
在本节将讨论3种不同的阵列模式下,TWIR的成像性能。为简便起见,这里忽略墙壁效应和传播衰减,考虑一个在自由空间中的理想点目标P,同时假定线性阵列位于x轴上,阵列中心和原点重合。成像几何如图2所示。A1、A2、A3和A4分别表示4根天线;d表示天线之间的间隔;L表示阵列长度;(0,yP)表示P的坐标。文中假设目标P位于远场,即yP≫L。
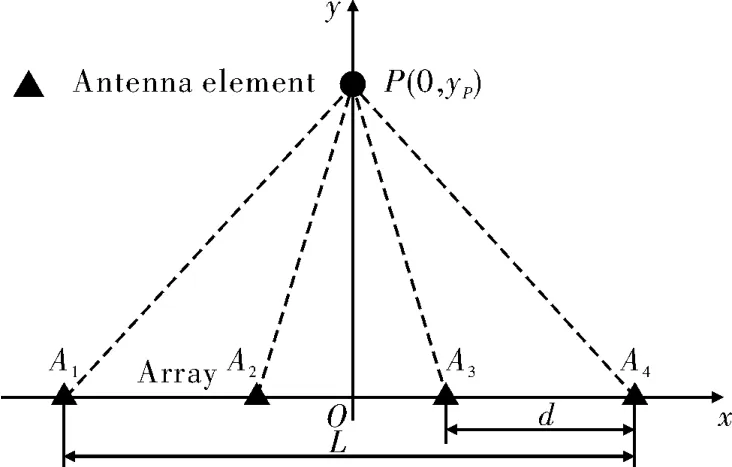
图2 成像几何
在STR模式中,所有天线都是收发复用的。天线依次完成信号的发射和回波接收,雷达从A1扫描到A4完成一次测量。显然,STR模式的孔径LSTR=L,阵元间距dSTR=d。
在SSIMO模式中,发射和接收是分置的。每根天线轮流作为发射天线,余下天线进行接收。雷达端到端扫描完成一次测量。SSIMO模式的等效孔径需要用虚拟阵元来进行描述。以收发天线对TRA1A2为例。假定θ为A1、A2和P之间的夹角。图3画出了三者之间电磁波的传播过程,该过程可以等效为在A1和A2之间存在一个虚拟的收发阵元进行。文献[8]指出,TRA1A2之间虚拟阵元的位置对应于θ的角平分线和阵列的交叉点A'。由于yP≫L,因此可以用A1和A2之间的中点A12近似代替虚拟阵元位置A'。

图3 虚拟阵元几何
因此,如图4(a)所示,SSIMO模式中12个收发天线对应于12个虚拟阵元。由于收发天线对诸如TRA1A2和TRA2A1对成像的贡献是一样的,因此每对收发组合都是一个重复的虚拟阵元,对应的等效孔径权矢量WSSIMO=[2 2 4 2 2],等效孔径长度为LSSIMO=L-2dSSIMO,虚拟阵元间距dSSIMO=d/2。
在MIMO模式中,只有位于左右两端的天线A1和A4是收发复用的。在8个收发组合中,也只有TRA1A4和TRA4A1对成像作用是一样的。图4(b)画出了MIMO模式的等效孔径,孔径权矢量WMIMO=[1 1 1 2 1 1 1],等效孔径尺寸LMIMO=L,虚拟阵元间距dMIMO=d/2。
对比SSIMO和MIMO模式的等效孔径,可以发现MIMO模式中较大的等效孔径得益于两端的收发组合即TRA1A1和TRA4A4。去掉这两对组合,MIMO等效孔径权矢量为[1 1 2 1 1],恰好是SSIMO的1/2。

图4 SSIMO和MIMO的等效孔径
2.1 方位向分辨率
方位向分辨率受制于孔径长度、目标距离和工作频率。通常使用窄带条件下的分辨率定义来描述UWB的方位向分辨率,即

其中,λc表示中心频率fc对应的波长;Le表示等效孔径长度。
3种模式在P处的分辨率依次为
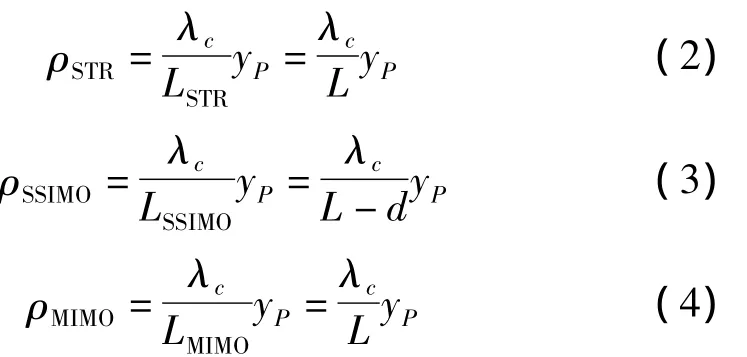
显然,SSIMO模式的方位向分辨率最差。
2.2 干涉区域
在UWB雷达波束聚焦过程中,受其大带宽的影响,所有天线阵元的信号只在目标区域周围聚焦,该区域即干涉区域(IR)[10]。在IR外,不同目标泄漏的能量交叉产生的鬼影将影响成像性能[11]。IR越大,鬼影的影响将越小。
用φIR表示IR和阵列中间之间的夹角,文献[10]指出,φIR可表示为

其中,Q表示分形带宽的倒数;d表示等效孔径中阵元之间的平均间距。
3种阵列模式对应的IR分别为


在SSIMO和MIMO模式中,虚拟阵元的密度更大,对应的IR更大,受鬼影干扰的概率也更低。
3 仿真验证

图5 (0,40)处目标在STR模式、SSIMO模式和MIMO模式下的BP成像和波束方向图
图6给出了不同阵列模式对3个目标的BP成像。3个目标的坐标依次为(0,39.6)、(0,40)和(0,40.4)。IR区域外3个目标能量泄漏相互交叉产生的鬼影清晰可见。STR中的鬼影效应最强。从图6(d)的波束方向图中可以看出,STR的鬼影水平只比主瓣宽度低了6 dB。

图6 (0,39.6)、(0,40)和(0,40.4)处目标在3种模式下的BP成像和波束方向图
3种不同阵列模式对不同位置的目标进行了成像,得到的方位向分辨率和IR宽度,如表1所示。文中IR宽度定义为主瓣两侧第一栅瓣3 dB幅度位置之间的距离。如表1所示,随着目标距离的增加,方位向分辨率逐渐降低,而IR宽度却逐渐增加。SSIMO的方位向分辨率最差,因其等效孔径最短且存在加权。同样受加权的影响,MIMO的分辨率要略弱于STR,尽管两种模式的等效孔径长度一样。SSIMO和MIMO的IR宽度几乎是STR的两倍,源于二者更为密集的等效阵元。
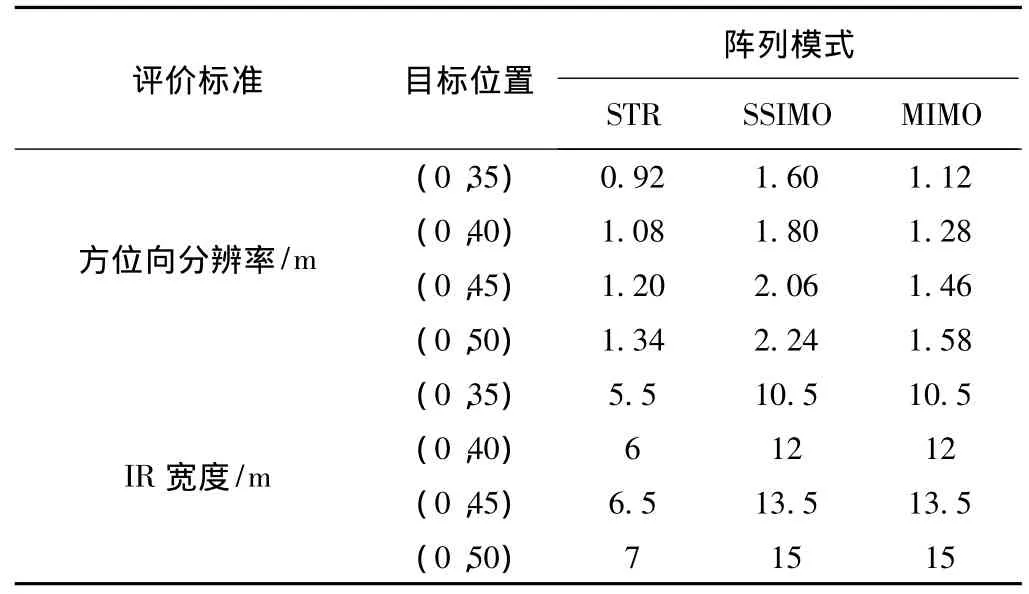
表1 不同位置目标在3种模式下的方位向分辨率和IR宽度
4 结束语
便携性限制了便携式UWB、TWIR的天线数量。不同的天线配置模式将获得不同的成像性能。基于方位向分辨率和IR,比较了在STR、SSIMO和MIMO 3种模式下雷达的成像性能。方位向分辨率和IR取决于等效孔径的尺寸和虚拟阵元间距。不同阵列模式的等效孔径和虚拟阵元密度不同。因此,在设计中应权衡阵列配置,以获取合理的孔径尺寸和阵元密度。在3种模式中,MIMO的综合性能最佳。但是,在实际TWIR设计中,天线收发复用难以实现。因此STR模式较少被采用。而MIMO,通常会在阵列左右两端添加两个额外的天线用作发射天线,降低了便携性。SSIMO模式产生的重复虚拟阵元最多。此外,SSIMO完成一次测量所需的时间也是最长的。
[1]BARANOSKI E J.Through - wall imaging:Historical perspective and future directions[J].Journal of the Franklin Institute - Engineering and Applied Mathematics,2008,345:556-569.
[2]MARTONE A,RANNEY K,INNOCENTI R.Automatic through the wall detection of moving targets using low-frequency ultra-wideband radar[C].Berlin:IEEE Radar Conference,2010:39-43.
[3]HUNT A R.Standoff through - the- wall imaging sensor[C].Pairs:IEEE Radar Conference,2011.
[4]BEERI A,DAISY R.High -resolution through -wall imaging[C].Proceedings of SPIE conference on Sensors,and Command, Control, Communications, and Intelligence(C31)Technologies for Homeland Secuity and Homeland Defense V,2006.
[5]KOCUR D,GAMEC J,SVECOVA M,et al.Imaging method:an efficient algorithm for moving target tracking by UWB radar[ J].Acta Polytechnica Hungarica,2010(7):5 -24.
[6]DEHMOLLAIAN M,THIEL M,SARABANDI K.Through -the-wall imaging using differential SAR[J].IEEE Transactions on Geoscience and Remote Sensing,2009,47(6):1289-1296.
[7]FRAZIER L.MDR for law enforcement[J].IEEE Potentials,1998,16(5):23 -26.
[8]JIN T,LOU J,ZHOU Z.Extraction of landmine features using a forward-looking ground-penetrating radar with MIMO array[J].IEEE Transactions on Geoscience and Remote Sensing,2012(10):4135 -4144.
[9]MCCORKLE J W.Focusing of synthetic aperture ultra wideband data[C].IEEE International Conference on Systems Engeering,1991:1 -5.
[10]SCHWARTZ J L,STEINBERG B D.Ultrasparse,ultrawideband arrays[J].IEEE Transactions on Ultrasonics,Ferroelectrics and Frequency Control,1998(45):376 -393.
[11]HUNT A R.Random array through the wall imaging sensor[M].Newyork:Johne - wily Press,2006.
猜你喜欢
幼儿园(2021年12期)2021-11-06
西南石油大学学报(自然科学版)(2018年2期)2018-06-26
雷达学报(2017年1期)2017-05-17
印刷技术·数字印艺(2016年11期)2016-12-06
光学精密工程(2016年2期)2016-11-07
光学精密工程(2016年1期)2016-11-07
科技视界(2016年6期)2016-07-12
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
