相控阵雷达目标跟踪下的自适应波形选择
2014-12-18 11:39王彬彬
电子科技 2014年5期
严 超,王彬彬,畅 言
(1.西安电子工程研究所总体1部,陕西西安 710100;2西安电子工程研究所北斗事业部,陕西西安 710100)
为在强噪声背景下保持高目标检测概率和低虚警率,可使用高能量波形和高检测门限,但这增加了雷达的能量资源消耗。因此,需设计一种自适应波形选择算法以平衡这种目标检测和能量资源消耗之间的矛盾。
自适应波形选择的依据是,所选择的波形要能使下一次目标照射的检测概率不低于预设的检测概率门限。按脉冲宽度从小到大依次选择各波形,根据每种波形在下次照射时返回的平均信噪比计算出相应的检测概率,若某个波形可达到所需的检测概率,则选择此波形作为下次照射波形;若所有波形均不满足,则选择最后一个脉冲宽度最长的波形,这便是雷达所能提供的最佳选择。
1 雷达模型
相控阵雷达的工作频率为4 GHz,采用单脉冲幅度比较法测角,天线阵面为平面方形;波束宽度随着扫描角的增大而展宽,阵面法向的双程3 dB波束宽度为1.6°,偏离法向60°时的波束宽度展宽至3.2°;雷达虚警概率为10-6,检测概率为0.975。
相控阵天线为方形阵列,水平方向和垂直方向各55个单元;各天线单元水平和垂直间距均为1/2波长;阵面法向位于0°方位角和15°俯仰角。
平面阵单波束归一化电压方向图[1]
设θbsq,θesq分别为方位和仰角的斜视角,则与波束的电压方向图为∑tk则

方位和俯仰的差波束电压为
图1给出了法线时(0,15°)的和波束方向图。图2给出了波束宽度随扫描角变化的情况。
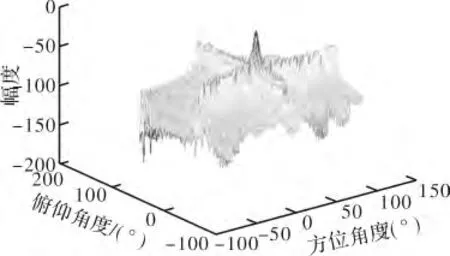
图1 法线时和波束
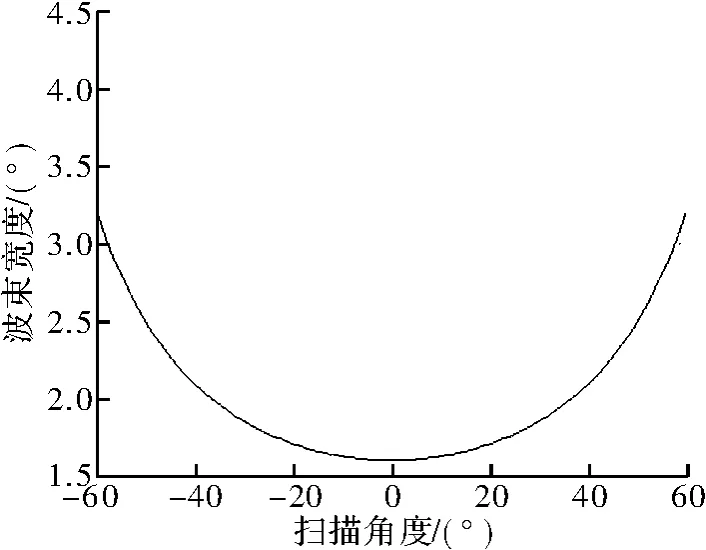
图2 波束宽度随扫描角变化
图3给出了和波束方位与俯仰面的波瓣图,图4给出了差波束方位和俯仰面的波瓣图,其中实线表示指向方位0°,俯仰15°,即阵面法向时的波瓣图;虚线表示波束指向方位-45°,俯仰30°方向时的波瓣图。从图中可看出,随着波束指向偏离法向,和波束宽度略有展宽。另外,和波束的副波瓣电平在20 dB以下[2-3]。
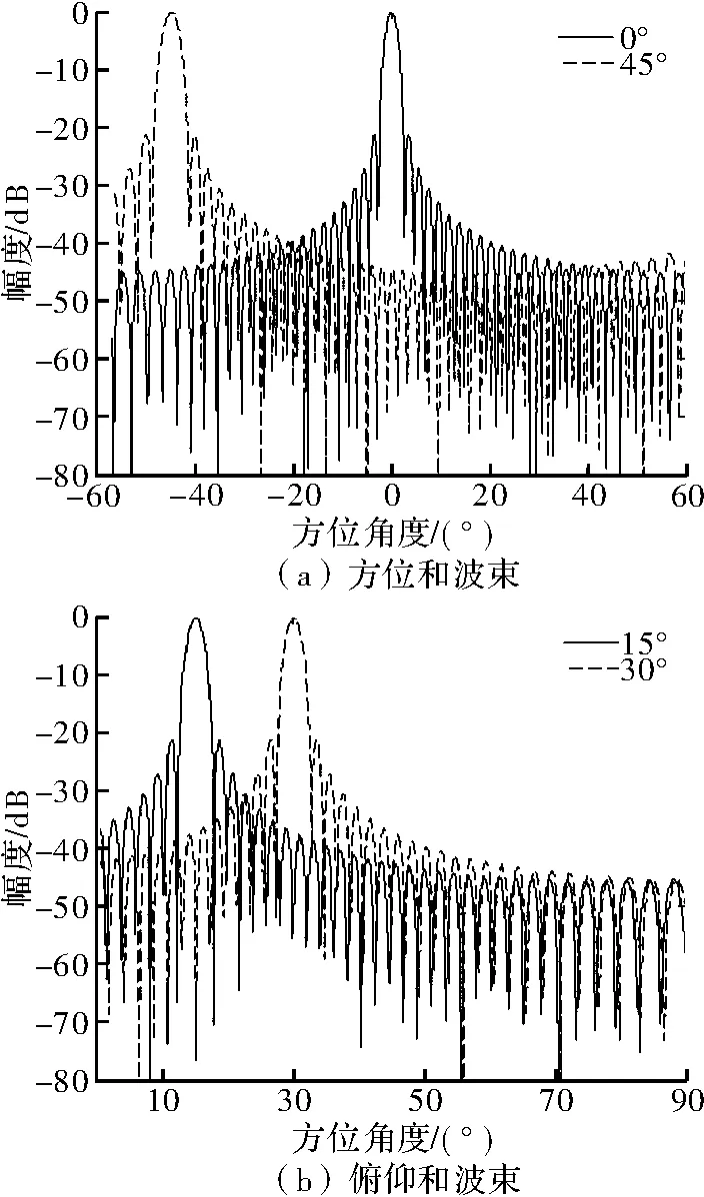
图3 和波束方位和俯仰波瓣图
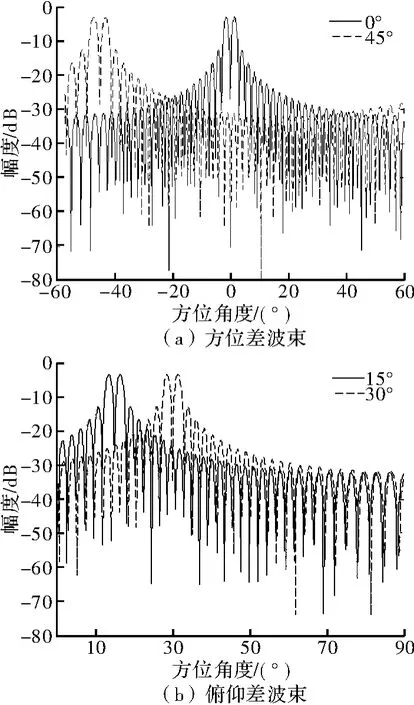
图4 差波束方位和俯仰波瓣
雷达参数和波形参数如表1和表2所示。
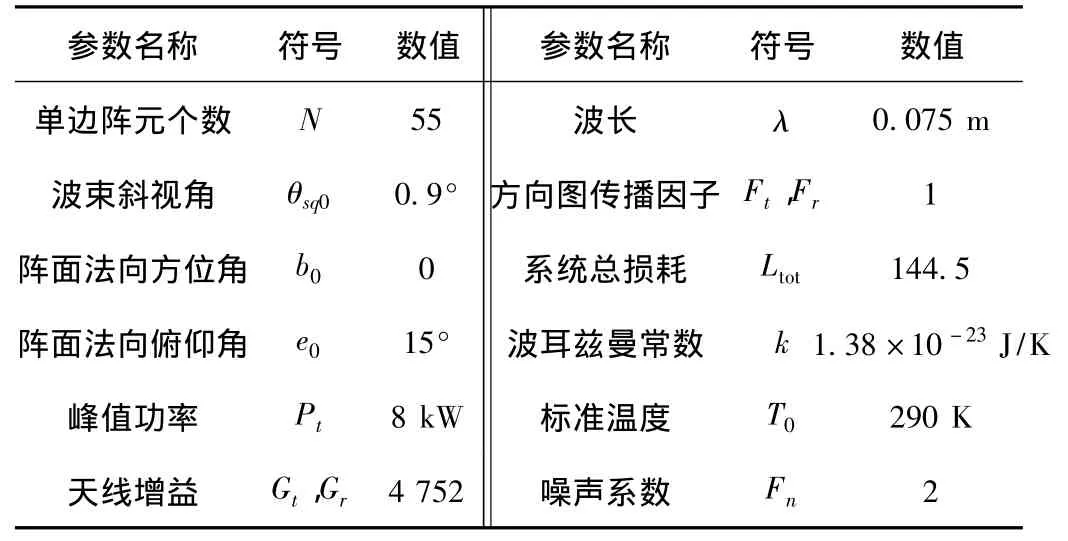
表1 雷达参数

表2 波形参数
2 自适应波形选择

其中,Save为目标回波的平均信噪比,按目标RCS平均值进行计算;TH为恒虚警情况下雷达检测门限;TH=10log10(-ln PCFARfa)。
设有Nw个脉冲波形,假设k时刻的雷达照射面积为σ^ave(k),可得到k时刻使用波形wi(1≤i≤Nw)预估
若目标RCS服从Swerling3型分布,其理论的检测概率计算公式为[4]的目标回波平均信噪比为
其中,τe(wi)为波形wi(1≤i≤Nw)对应的脉冲宽度;Rt为雷达距离波门的中心距离;∑t为天线和波束电k k压方向图;Gstc(R)为距离雷达R处的灵敏度时间控制增益。由于下一时刻的Rtk,∑tk未知,需使用其预测值代入计算,这样便可确定出Save(tk,wi),于是有
其中,R^(tk)为tk时刻目标距离的预测值;(t-k)为假定雷达平均波束指向误差为σtp倍的波束宽度时,预估目标与波束天线方向图,方位和俯仰的波束宽度分别为Bbw和Bew,则∑^(t-k)可按下式计算[1-4]
σt按预设的置信度P计算且p CL

双侧分位数u0.5α[4]按 α =1 -PCL求出。由于期望目标以置信度PCL落入预测波束内,波束指向误差由方位和俯仰的标准差门限计算。
设检测概率门限记为 PTHD,tk时刻选择的波形W(tk)按以下公式确定

上式中,PD(tk,wi)表示依波形变化预估的检测概率。
3 仿真实验
假设目标真实轨迹,如图5所示,跟踪时间为400 s:起点为(15 000,3 000,6 000);0 ~100 s,匀速直线运动;100~200 s,第一次小机动拐弯;200~250 s,匀速直线运动;250~275 s,第二次大机动拐弯;275~400 s,匀速直线运动。径向距离噪声标准差为75 m,方位和仰角由雷达模型产生。雷达采用IMM[5-9]跟踪算法,跟踪周期为T=2 s,并分别使用固定波形和自适应波形。
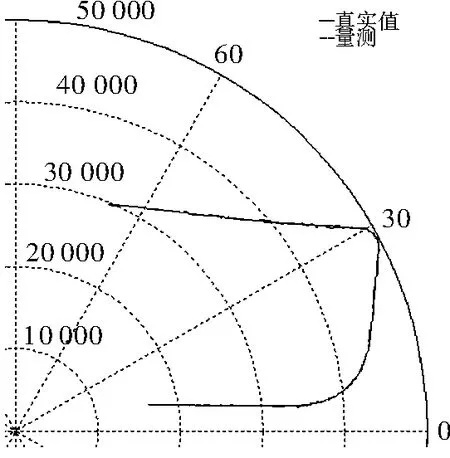
图5 目标真实轨迹与量测
为保证检测概率,固定波形使用最宽脉冲80μs,且假设采样一次只发一个脉冲,在时间400 s内发射的总脉冲宽度τtotal=200×80=16 000μs。
对上边同一次采样,同时进行自适应波形选择。假设初始3个量测均以最大脉冲测量,则自适应波形选择如图6所示。总采样脉冲宽度τtotal=∑τi=10 840μs;单次平均脉冲宽度τe=10 840/200=54.2μs。
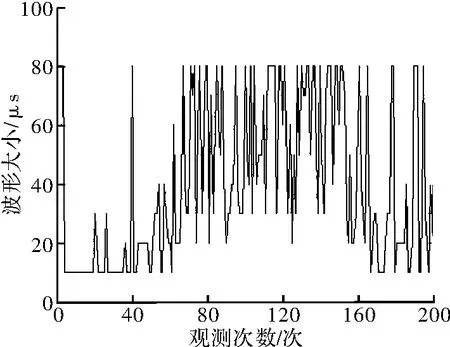
图6 波形选择情况
4 结束语
由仿真数据可看出,自适应波形选择可在确保检测概率的同时,有效地节约雷达能量资源。而若要同时采用自适应采样间隔,其资源节约性能将更理想。
[1]林昌禄.天线工程手册[M].北京:电子工业出版社,2002.
[2]蔡庆宇,薛毅,张伯彦.相控阵雷达数据处理及其仿真技术[M].北京:国防工业出版社,1997.
[3]王峰.相控阵雷达资源自适应调度研究[D].西安:西北工业大学,2002.
[4]周文辉.相控阵雷达及组网跟踪系统资源管理技术研究[D].长沙:国防科技大学,2003.
[5]何友,修建娟,张晶炜,等.雷达数据处理及应用[M].北京:电子工业出版社,2006.
[6]丁鹭飞,耿富路.雷达原理[M].西安:西安电子科技大学出版社,1995.
[7]曾光.多功能相控阵雷达自适应调度算法研究及应用[D].长沙:国防科技大学,2003.
[8]王志敏,肖卫初.机动目标跟踪中的IMM算法性能分析[J].湖南城市学院学报,2003(4):109 -111.
[9]赵敏.机动目标跟踪理论的研究及其应用[D].西安:西北工业大学,2006.
猜你喜欢
电信科学(2022年11期)2022-12-08
幼儿园(2021年12期)2021-11-06
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
物联网技术(2019年9期)2019-11-06
通信技术(2019年3期)2019-05-31
科技视界(2018年9期)2018-07-27
汽车文摘(2017年9期)2017-12-06
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06