
起飞一发失效应急程序路径选择研究
2015-01-06 03:44付文勇
中国科技信息 2015年8期
付文勇
从安全性和经济两个方面分析了起飞一发失效应急程序的重要性,结合国内外一发失效应急程序的设计规范、运行要求和航空公司运行实践经验,提出了起飞一发失效应急程序的总体设计流程。针对手工选择路径的不足,提出用基于SRTM3 数据的A 星网格搜索算法自动寻找EOSID 路径,案例研究表明该算法能自动搜索出符合条件的EOSID 路径。
起飞一发失效应急程序概述
安全和效益是民航发展的永恒主题。安全和效益又是一对矛盾体,在传统的粗犷的民航运作模式下,保证安全就可能牺牲效益,而提高效益就有可能有损安全。现代交通运输系统中,动车和高铁迅猛发展,其快捷性和方便性已对民航发展造成较大冲击,尤其是对500km 距离圈内的支线航线。那么,国内民航运输要生存和发展就有两个选择,降低成本或开辟有价值的复杂地形地区的航线。在复杂地形地区开辟航线,安全和效益的矛盾就更加凸显。一发失效应急程序(EOSID)的研究和设计,就是在满足航空法规的限制下解决该问题的手段之一。
一发失效应急离场程序是相对于标准仪表离场程序(SID)而言的,它采用有别于制作SID 的设计规范和参数,使得保护区内的障碍物通常都少于SID 程序保护区内的障碍物,或者采用有别于SID 的离场航迹从而提供更多的越障距离或更少的需要超越的障碍物,以此来满足法规限制的越障要求,并提高飞机起飞重量,从而为航空公司带来经济效益。
随着我国民航运输的发展和西部大开发的推进,广大西部地区对航空运输的需求日益迫切,而这些地区往往地形复杂、气象条件恶劣且海拔较高。如西藏林芝机场,海拔2949m,属于高原机场;周围都是高山峻岭,飞机起降只能在狭窄弯曲的河谷中飞行,飞行航道最窄处距离峡谷两侧山脊不到4km;机场多低云天气,风切变频繁,飞机只能利用上午时刻起降,全年适航时间累计仅有100d。要在这样的机场运行,民航局规定航空承运人必须设计相应机型的起飞一发失效应急程序。
起飞一发失效应急程序设计策略
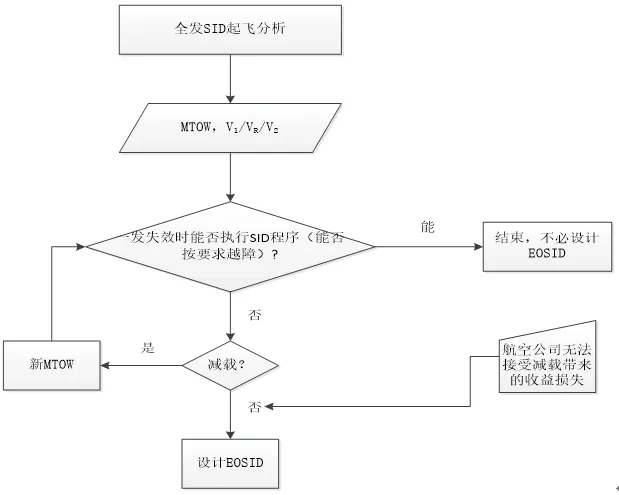
图1 进行EOSID 设计之前需要进行的性能评估流程图
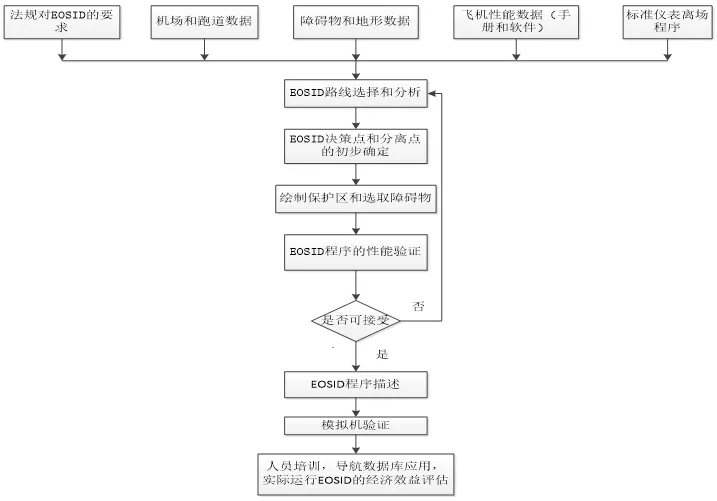
图2 EOSID 设计流程图
国际上起飞一发失效应急程序的研究始于20 世纪80 年代,但由于商业保密的原因,直到90 年代才有相关资料公布。欧洲的Monique Fueri 在《SIDs and EOSIDs》中对标准仪表离场程序和起飞一发失效应急程序进行了比较分析。2002 年,空客公司的一发失效应急程序工作小组在《AIRBUS EXERCISE GUIDEBOOK》中举例分析了一发应急程序的制作方法。参考文献结合作者丰富的EOSID 设计经验,分析了设计过程中风的影响和转弯梯度损失的问题。民航局最新颁发的咨询通告《飞机起飞一发失效应急程序和一发失效复飞应急程序制作规范》,统一了水平保护区范围和垂直越障要求。
本文在阅读研究了大量一发失效应急程序相关文献的基础之上,结合设计经验,提出了一种设计一发应急程序的总体流程和思路,见图1 和图2。
由图可看出,起飞一发失效应急程序设计需要收集大量原始资料,然后结合标准仪表离场程序和机场周围地形情况,初步勾勒出能够避开高大障碍或提供更多爬升距离的路线。可见,EOSID 设计是一个循环迭代的过程。如果初步设计的EOSID 程序不能达到增加商载的目的时,就需要重新选择路径,并进行越障分析。
起飞一发失效应急程序设计中最重要的就是要找到一条合理的路径,使之能够提供更多的爬升距离或飞越较少较矮的障碍物,从而在满足安全的前提下提高商载。
但是,目前EOSID 的路径选择几乎全是由人工地图作业得出的。此项工作必须由富有经验的性能工程人员和程序设计人员来完成,并且要经过多次人工迭代试算和飞机性能验证,人力物力耗费过大。而且,由此设计出的起飞一发失效应急程序轨迹受人为主观经验的影响较大。为了解决这些问题,受到网络搜索法和机器人路径搜索法的启发,本文提出了用基于网格搜索的A 星算法来自动寻找EOSID 的路径。
起飞一发失效应急程序路径选择算法研究
搜索空间的数据来源SRTM3
本文利用SRTM3 提供的高程数据作为数字地图数据,进行EOSID 路径搜索仿真。
SRTM 地形数据是由美国、德国和意大利三国联合测量处理和发布的。SRTM 的全称是Shuttle Radar Topography Mission,即航天飞机雷达地形测量使命。美国的“奋进号”航天飞机于2000 年2 月发射升空,目的是利用合成孔径雷达对全球地表进行精确测量。经过长达11d 的测量,共采集了原始雷达影像数据9.8 万亿字节,即近12TB。经过长达2 年多的数据处理,完成了全球数字高程模型数据的制作。SRTM 数字高程模型数据是迄今为止最为完整和精确的数字地形数据,水平精度达到±20m,垂直精度达到±16m。发布的SRTM由若干个文件组成,每个文件中存储了一个经纬网格的地形数据。在每个经纬网格中,每隔1arc-second 和3arcsecond 进行采样,于是最小分辨单元就有30x30 和90x90 两种形式。所以,在SRTM 产品中,就有SRTM1和SRTM3 两类。目前公开对外发布的只有基于SRTM3 的各种产品。
基于网格搜索空间的A星寻径法
A 星算法是一种启发式搜索算法。启发式搜索就是一边搜索一边评估出相对较好的位置,然后再从该位置进行搜索并不断评估和更新,直到找到目标。启发式搜索方式可以解决状态空间非常巨大或状态空间不可预测的搜索问题,并能够减少很多不必要的搜索路径,从而缩短了搜索时间。在所有启发搜索算法中,代价评估函数是十分重要的。A 星算法估计函数的基本形式如下:

式中,g(n)是起点到节点n 的实际代价,它等于节点n 的父节点的g 值加上父节点到节点n 的单步代价值。
h(n)是节点n 到目标点的路径估计代价。
A 星算法基本思想是:首先确定起点,把起点作为一个中心点。然后搜索该中心点的所有相邻点(称为周边节点),计算到所有周边节点各自的实际代价g 和路径估计代价h,从而计算出估计值f。
然后,创建两个容器,分别称为open 和close。open 用来存放要进行评估计算的点,开始时open 中只放入一个元素,就是起点。close 初始化为空值,它用以存放每一步的中心点(父节点)。当进行第一轮搜索之前,把起点的所有周边节点都放入open 表中,并以计算出的估价值f 进行排序。找出代价最小的节点作为下一轮计算的父节点,并把该轮计算的父节点存入close 中。
新一轮搜索,寻找出上一轮搜索得出的父节点的所有周边节点。在这些节点中,跳过障碍物及不可通过的节点;然后检查除障碍物之外的所有周边节点是否都已在open表中,把没有在open 中的周边节点加入open 表中。对于已经在open 表中的本轮中心节点的周边节点,要计算其新的g 值,并与上一轮的g 值作比较。若新g 值更小,则把该节点改作当前父节点,并重新计算f 值。否则,不改变当前父节点。比较open 表中各节点的估价值f,找出f 值最小的节点作为下一轮搜索的父节点,并把当前父节点加入到close 表,然后将其从open 表中删除。重复搜索,直到达到终点或搜索完整个区域。
本文设计的算法流程图如图3。
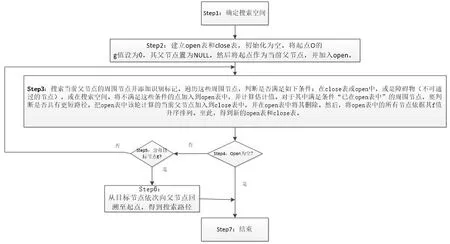
图3 算法流程图
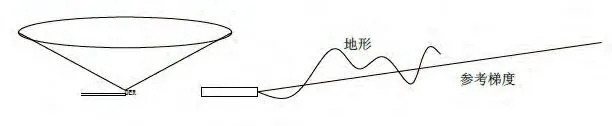
图4 圆锥确定搜索区域示意图
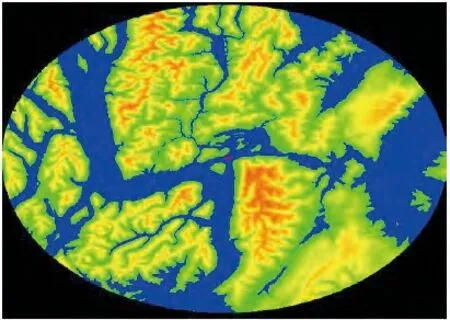
图5 2%梯度确定的搜索区
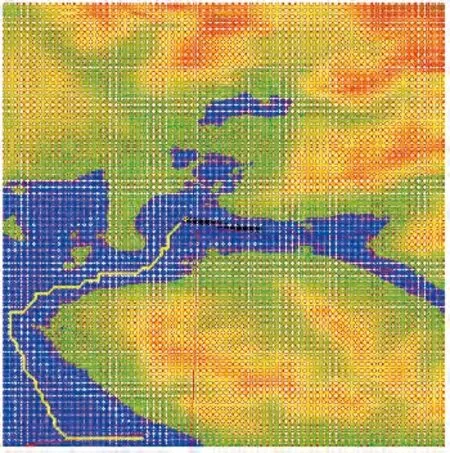
图6 EOSID 轨迹生成
案例研究
根据前面研究的基于网格空间的A 星寻径算法,首先确定搜索区域,进行网格的划分和地形障碍物的标定。
一种确定搜索区域的划分方法是“梯度圆锥法”。以跑道离场末端DER 为圆锥顶点,以与水平面成某一梯度的圆锥向上散开,如图4 所示。机场周围的地形,若穿透圆锥面都将被认为是障碍物,障碍物的水平大小以与圆锥面的交线为界。低于该梯度圆锥面的地形不予以搜索。如下图,以某机场为例,搜索起点确定为跑道的DER 点,终点为跑道南端的一点。数据来源于SRTM3 高程数据,用Global Mapper 软件进行预处理。蓝色区域是低洼地形区域,不存在障碍物。图5 所示为2%梯度时的搜索区域。
确定好搜索区并标识障碍物后,需要进行网格节点划分。这里,根据SRTM 数据,以90x90m 划分网格。
然后,确定A*算法的代价函数f。公式5.1:


算法仿真结果如图6 所示。
案例分析中,成功地自动找到了一条路径,该路径能够避开所设障碍物,并以较短的距离到达预定的起飞一发失效应急程序的终点。
总结
本文在阅读研究了大量一发失效应急程序相关文献的基础之上,结合设计经验,提出了一种设计一发应急程序的总体流程和思路。然后针对目前手工选择起飞一发失效应急程序路径时出现的问题,重点研究了基于SRTM3数字数据,用A 星算法自动搜索EOSID 轨迹的方法。案例研究表明,该方法能寻找到避开障碍物的航迹。在下一步研究中,可改进A 星算法的代价函数以进一步优化A 星算法,更快地搜索到最优的EOSID 路径,从而为设计起飞一发失效应急程序提供更有力的支持。在未来的EOSID 程序设计中,智能自动选择必将成为路径选择的趋势,手工选择路径的方式将会逐渐被替代。
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
作文新天地(初中版)(2019年6期)2019-08-15
人大建设(2019年12期)2019-05-21
瞭望东方周刊(2017年42期)2017-12-05
北京航空航天大学学报(2017年6期)2017-11-23
环球时报(2017-03-30)2017-03-30
浙江大学学报(工学版)(2016年10期)2016-06-05
中国卫生(2015年3期)2015-11-19
