
X波段中频相参多普勒天气雷达接收机的设计
2015-01-17 05:46吴志毅徐秀会
电子设计工程 2015年1期
吴志毅,徐秀会
(四川信息职业技术学院 四川 广元 620840)
全相参雷达需然具有性能稳定,噪声低,寿命长,不受电源波动和机械震动的影响等特点。但价格比较高,架设、移动比较麻烦,灵活性不够。如果采用中频相参脉冲多普勒体制,雷达性价比高。雷达采用磁控管发射机,其使用的磁控管价格低,高压工作时间超过2 000小时[1]。接收机采用可变本振数字中频接收技术,具有大动态线性范围。采用这些先进技术的雷达在性能上达到全相参雷达的水平,在价格上特别是在全寿命期成本上大大低于全相参雷达。
1 X波段中频相参多普勒天气雷达接收机主要技术指标
1)接收机工作频率: 9 700 MHz
2)接收系统灵敏度: -105 dBm(0.5 μs)
3)动态范围: ≥90 dB
4)噪声系数: ≤3 dB
5)本振的短期频率稳定度为:10-10/ms
6)中频输出:30 MHz
7)中频带宽:2 MHz
2 接收机系统设计方案框图
接收系统的主要功能是将来自天线的微弱回波信号放大变频,再放大到所需的功率电平。放大后的中频回波信号送到数字中频接收机,转换为数字中频信号并且经过正交相位运算获得正交的数字信号送到信号处理器。雷达接收机系统设计方框图如图1所示。
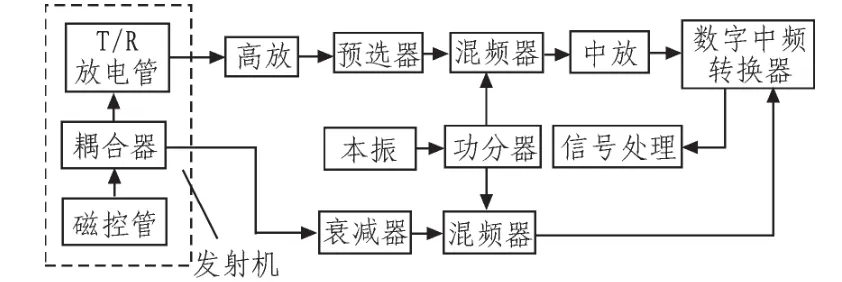
图1 接收机框图Fig.1 Receiver block diagram
3 主要技术参数计算
3.1 接收机噪声系数计算
我们知道,接收机的总噪声系数可以用(1)所示计算。

在X波段中,低噪声高频放大器的噪声系数一般≤2 dB,增益为G1=251.2(24 dB)。30 MHz中频放大器的噪声系数≤4 dB,混频器的噪声系数一般为8 dB左右,增益为G2=0.158(-8 dB)。因此取 F1≤1.58(可以自己选)。将数据代入(1)可求出:F(dB)=2.15 dB。 满足设计要求(≤3 dB)。
3.2 接收机灵敏度计算
接收机的灵敏度是表征接收机接收微弱信号能力的一个物理量,它的表达式为:

根据工程设计经验,一般情况下,我们取接收机输出端的信号噪声功率比为1时(即识别系数D=1)接收机输入端的功率为灵敏度,也就是所谓的“临界灵敏度”:

由(3)式可看出“临界灵敏度”只与接收机带宽B和噪声系数F有关,因为K(波茨曼常数)、T0均为常数——标准室温(290°K)。接收机带宽的设置与所接收的信号有关,在该接收机中,接收信号最小脉冲宽度为0.5μs。对应匹配滤波器带宽为2 MHz,因此雷达系统的中频带宽按2 MHz带宽计算。即取:B=2 MHz(0.5 μs),由此可算出接收机的“临界灵敏度”

数据代入(4)式可以计算出Psmin≈-110dBm。
由此可见,接收机灵敏度是满足指标要求的,且有一定的余量。考虑工程化、器件老化等因数,以下的计算仍按灵敏度为-109 dBm计算。接收机输入阻抗按50Ω计算,输入阻抗上的最小可辨电动势[5]为:

按场放输入端灵敏度Psmin=-109 dBm计算场放输入端最小可测电压Umin:

式中:R=50Ω为场放输入阻抗,计算可得Umin=0.7934 uV。如果按噪声功率考虑:
场放输入端的噪声功率按下式计算:

式中:
TR=T0(F-1)=290°(1.64-1)=185.6°
PN=1.38×10-23×(290°+185.6°)×1×106-6.563 3×10-15
噪声电压

式中:R=50 Ω,UN=0.572 9 uV
可以看出Usmin与UN的比值是>1的,因而从背景噪声中检出信号是没问题的。
3.3 前端增益计算
数字中频转换器的接口电平为-76~+14 dBm,即最小输入信号电平为-76 dBm(35.44 uV),前面已算得场放输入端最小可测电压uV,由此可算得接收机前端总增益:35.44 uV/0.7934 uV=44.67(33 dB),即:-76 dBm-(-109 dBm)=33 dB。在设计时取A=33 dBm。接收机前端增益分配为:场放为+24 dB、预选滤波器为-3 dB、混频器为-8 dB、前中为+20 dB。
3.4 系统动态范围分析
当场放输入端灵敏度为-109 dBm时,按系统输入动态为90 dB计算,则场放输入端最大信号功率为:90dB-109 dBm=-19 dBm;由系统前端增益设置可知,此时到达数字中频转换器输入端的信号强度为:-19 dBm+33 dB=14 dBm;如前所述数字中频转换器最大输入信号强度为14 dBm,即输入信号范围在灵敏度(-109 dBm)至-19 dBm计算,可以知道此时系统仍可保持线性输出,达到90 dB的线性动态范围,因此系统线性动态范围满足设计性能要求。
结合前面分析,前端在输入最大信号状态下,信号流程各段电平、动态分析框图见图2所示。

图2 前端信号流程各段电平、动态分析框图Fig.2 The front-end signal process paragraphs、Dynamic analysis diagram
3.5 稳定本振
为保证雷达的测速精度,接收机本振采用高稳定度固定频率振荡器,其短期1 ms频率稳定度为10-10量级。根据雷达性能要求,由于晶振倍频源具有相位噪声低、杂散小等特点,为保证系统、整机稳定可靠工作,避免可能存在的环路失锁等问题,本系统考虑选用晶振倍频本振。
对频率稳定度的要求:
由于采用了数字校正技术(DSI)[6],降低了发射机对整机改善因子的限制,提高了整机地杂波中目标可见度,使改善因子≥30 dB,取30 dB。
4 测试与结果分析
灵敏度、动态范围、噪声系数的测试验证。
4.1 灵敏度测试
灵敏度测试方框图如图3所示。在接收机场放口输入噪声(由微波信号源代替),在数字接收机输出端接示波器。逐渐减小输入信号源的输出功率,当在示波器上观察的信号幅度刚好与噪声信号相当时,记录信号源的输出功率为AdBm,则接收机灵敏度为AdBm-LdBm,LdBm为电缆的损耗。所测灵敏度可以达到为-110.5 dBm。

图3 接收机灵敏度测试方框图Fig.3 The receiver sensitivity test block diagram
4.2 线性动态范围测试
采用机外信号源,由接收机前端注入,在数据终端读取信号的输出数据。输入输出曲线采用最小二乘法进行拟合,拟合直线的斜率由输入功率和对应的输出数据来确定。由测量曲线与拟和直线的差值≤1 dB来确定接收系统低端的拐点和高端的饱和点,饱和点和拐点所对应的输入信号功率值的差值为系统的动态范围。经测试,拟和直线斜率为1.005 7,拟和均方根误差为0.14,高端饱和点为-16 dBm,低端拐点为-110 dBm。因此,动态范围为94 dBm。

表1 噪声系数值测量值Tab.1 Noise factor values measured values
4.3 噪声系数
测试方框图如图4所示。在雷达终端显示上读出噪声功率值,测试结果如表1所示。

图4 噪声系数测试方框图Fig.4 Noise factor test block diagram
因此噪声系数平均值为2.83 dB。满足设计要求。
5 结 论
波段中频相参多普勒天气雷达接收机设计理论分析与计算方法,已经在一些小型中频相参气象雷达中运用,在这些雷达中,经过生产测试,对计算出的理论参数完全满足了设计要求,说明这种设计方案切实可行。
[1]Merrill l.Skolnik.雷达系统导论[M].北京:电子工业出版社2007.
[2]蔡成仁.雷达原理与气象雷达系统[M].北京:兵器工业出版社,2001.
[3]弋稳.雷达接收机技术[M].北京:电子工业出版社,2005.
[4]丁鹭飞.雷达原理[M].北京:电子工业出版社,2009.
[5]焦中生,沈超玲,张云.气象雷达原理[M].北京:气象出版社,2005.
[6]王小谟.雷达与探测[M].北京:国防工业出版社,2000.
猜你喜欢
数字通信世界(2020年3期)2020-04-06
雷达与对抗(2019年4期)2019-03-10
计算机与数字工程(2019年1期)2019-03-01
制造技术与机床(2018年12期)2018-12-23
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
成都信息工程大学学报(2017年1期)2017-07-21
舰船电子对抗(2016年3期)2016-12-13
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
