
面向地铁车辆牵引电机的车载变流系统设计
2015-01-17 05:46方晓王丹申天亮马东辉
电子设计工程 2015年1期
方晓,王丹,申天亮,马东辉
(广州地下铁道总公司 广东 广州 510310)
近年来,随着我国经济的不断发展,城市化步伐进一步加快。未来几年内,国家将投资1300多亿发展城市地铁、轻轨,以改善高速城市化带来的交通拥堵和环境问题。项目涉及北京、上海、广州等十几个城市。然而,城市轨道交通的关键技术部件—牵引变流器却一直依赖国外进口[1]。因此,研究设计面向地铁车辆牵引电机的车载变流系统,努力实现其国产化具有很高的经济价值和现实意义。本文首先针对牵引变流器系统结构、主电路及控制系统完成相应设计,并介绍相关器件的选型方法;其次,采用间接矢量控制策略完成地铁车辆异步电机控制;最后,通过模型仿真和实验证明该设计方案可行可靠。
1 牵引变流器结构设计
图1所示为牵引变流器结构示意图,其由3部分组成:主电路、驱动电路和控制电路。其中主电路为直流电能转换成交流电能的主体和载体,驱动电路主要进行控制信号的功率放大,并提供IGBT贯穿短路和过流时的保护功能。而控制电路则作为异步电机控制策略数字实现的平台,为主电路提供逆变控制信号。
2 主电路设计
2.1 主电路结构设计

图1 变流器结构图Fig.1 Converter structure chart
牵引变流器主电路部分采用三相电压型逆变电路结构,其由预充电回路、中间直流滤波器、逆变电路和放电回路四部分组成,如图2所示。

图2 牵引变流器主电路Fig.2 Main circuit of traction inverter
预充电回路主要由主接触器KM1,预充电电阻R1和预充电开关器件Q1组成[2]。在系统启动瞬间闭合预充电开关器件,对电容充电。电容充电饱和后断开预充电开关器件,再闭合主接触器进行切换,从而减小对支撑电容的电压冲击[3]。
中间直流滤波器包含滤波电感L和支撑电容C。其中支撑电容的主要作用是滤除变流器输入端的纹波电压,缓冲能量,保持直流侧电压稳定,而滤波电感则主要用于抑制直流侧电流突变[4]。为有效减小直流电压的脉动、稳定电压、提供无功功率,支撑电容值应尽量大。但支撑电容值过大又会影响电压环控制的跟随性能。综合考虑各项性能指标,下文将详细论述支撑电容、滤波电感的选型方法。
假设牵引变流器额定容量为210 KVA,额定电压1 500 V,功率因数0.85,其网侧直流电压值为1 000~1 800 V。而直流电压跟随性能的优劣则通过网侧直流电压由稳定最低值1 000 V跃变到额定值1 500 V的动态过程来评价。当网侧电压从1 000 V跃变到1 500 V时,将以最大电流Idm给负载和电容充电,其动态响应过程等效电路如图3所示[5]。为便于计算,把电机负载等效为电阻负载,相应折算公式如下:

图3 网侧电压跃变动态等效电路图Fig.3 The dynamic equivalent circuit diagram of the grid voltage jump
根据RC一阶动态响应方程可得

网侧电压从1 000 V升到1 500 V的上升时间不大于0.15 s,则需满足

将式(1)、式(2)代入式(4)可得

考虑到电容实际体积和成本的大小,可选择2个额定电压为1 800 V,容量为4.2 mF的电容并联。
电感主要用于抑制电容充电时的冲击电流,同时根据直流侧谐波抑制的要求(地铁牵引传动系统直流侧滤波器谐振频率一般在20 Hz左右),可选择额定电流80 A的空心电感且L=5.2 mH,(具有5倍过载能力)。
逆变电路是整个牵引变流器的核心,主要包含3个IGBT桥臂,且每一个IGBT上都并联有吸收电容,通过受电弓取电,完成将1 500 V的直流电逆变成可变频变压的交流电。IGBT的选型主要考虑额定电压、额定电流及散热效果。本文给出选型参考公式如下:

其中Uin为受电弓网压1 500 V;K1为电网电压波动系数,一般取1.15;K2为中间直流回路有反馈时的泵升电压系数,一般取 1.2;K3为必要的电压安全系数,一般取 1.3~1.5[6]。代入式,得

直流侧的额定电压为1 500 V,假设输出电压有效值为1 050 V,在额定功率210 KVA工作时,其输出电流的大小为:

考虑过载系数为1.5,纹波系数为1.2,则流过IGBT的最大电流如下式表示:

根据以上计算所得的选型电压和电流,对应牵引变流器应采用耐压等级为3 300 V,额定电流为400 A的IGBT。
放电回路主要包含放电开关管Q2和放电电阻R2。在牵引变流器停止工作的时候闭合放电开关管Q2,在电容电压降低到安全范围内时再断开开关管,既可以提高变流器的安全可靠性,又可以节省调试时的等待时间,提高效率。
2.2 控制系统设计
本文设计的地铁牵引传动控制系统采用DSP+FPGA的基本构架。其中DSP采用TI公司的TMS320F28335用以完成异步电机控制算法、数据采集/转换、CAN通信、485通信及以太网通信;而FPGA则采用ALTERA公司的Cyclone EP1C12Q24017,作为并行处理芯片其在完成PWM脉冲发生功能的同时,当接收到有关保护的异常反馈信号时,还可以迅速封锁脉冲,进行硬件保护。
3 控制策略
牵引电机控制技术是牵引传动控制系统的核心技术,本文采用间接矢量控制策略,利用电机定子电流励磁分量、转矩分量双闭环,经过电流控制器实现定子电压幅值给定。且无须磁链观测器,定子电流励磁分量给定值直接通过磁链给定值获得,同时,转矩给定值结合励磁电流给定值计算出转差频率,既而与电机反馈频率相加得到电机同步频率给定值,经过积分获得解耦角θ,最终实现解耦控制。在同步旋转坐标系下,异步电机动态等效电路如图4所示。
根据电机动态模型可以得出转子回路方程

转子磁链可表示为

由于式(10)中的转子电流是不可测的,因此,借助于式(11),消去其转子电流,可得到如下表达式
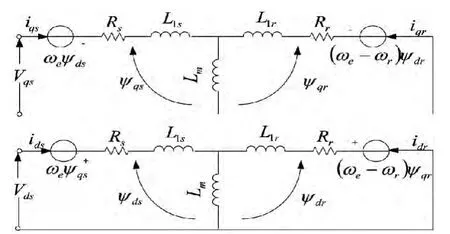
图4 同步旋转坐标系下的电机动态等效电路Fig.4 Dynamic equivalent circuit of motor synchronous rotating coordinate system

其中

为使转子的合成磁链定向在de轴上,需要

将式(14)和式(16)代入式(12)中,可得

代入式(17)可得

即稳态时转子磁链与电流ids成正比[7]。
本文间接矢量控制策略原理框图如图5所示。这种方法不但具有基于稳态模型转差频率控制系统的优点,而且通过矢量控制克服了其不足之处。与直接矢量控制方法相比,结构简单,且无需进行磁链观测,与常规的转差控制方法一样,根据反馈角频率,加上由给定转矩推算出的转差角频率,得到控制定子电流的瞬时角频率,再通过积分器得到定子输入电压矢量的相位角θ。从而使异步电机的电流和转矩迅速由原先的工作状态变换到新的工作状态[8]。
根据给定电磁转矩T*e,结合定子电流励磁分量给定值可以得到转矩分量。


图5 带开环磁链控制的间接矢量控制框图Fig.5 Indirect vector control block diagram with open loop of flux control
式中P为电机极数。由于转子磁链受反馈速度信号的控制,因此,可直接通过查询转子磁链曲线获得磁链给定值。当反馈电机转速小于电机额定转速时,磁链给定值恒为额定磁链;当电机运行转速大于电机额定转速时,则进入弱磁阶段即磁链给定值与反馈转速成1次反比逐渐减小。定子电流转矩分量和励磁分量给定值分别与实际测量值求差后进入PI调节器,从而得到定子电压给定值。结合电压矢量的相位角θ,最终给出当前控制周期内的PWM脉冲驱动信号。
4 模型仿真
在matlab中搭建系统仿真模型,输入直流侧电压为1 500 V,开关频率为1 k。
图6为稳定时异步电机定子电压与三相电流的仿真波形,由图可见三相电流波形正弦度良好。

图6 稳态时仿真波形Fig.6 Steady-state simulation waveform
图7 则为动态过程中,定子电流励磁分量/转矩分量给定值与反馈值的对比仿真波形,分析可知其动态响应较快,超调量较小,既而证明了控制策略的合理性。
5 实验验证
根据上文构建的变流系统,搭建实验平台,其中支撑电容选择2个额定电压为1 800 V,容量为4.2 mF的电容并联。电感为5.2 mH。直流侧输人的电压为1 500 V。IGBT开关频率为1 kHz。所选异步电机额定电压1 050 V,频率为60 Hz。图9依次给出了牵引电机电流、牵引电机转速、转子磁链q轴分量、定子电流转矩分量给定值波形,由图可见,牵引电机在各种运行工况下,转子磁链q轴分量基本为0,牵引电机电流跟随给定转矩电流变化,系统运行稳定,且牵引电机起动平滑,转矩动态响应快。
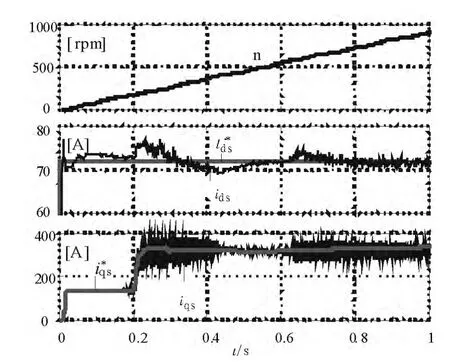
图7 动态时仿真波形Fig.7 Dynamic simulation waveform
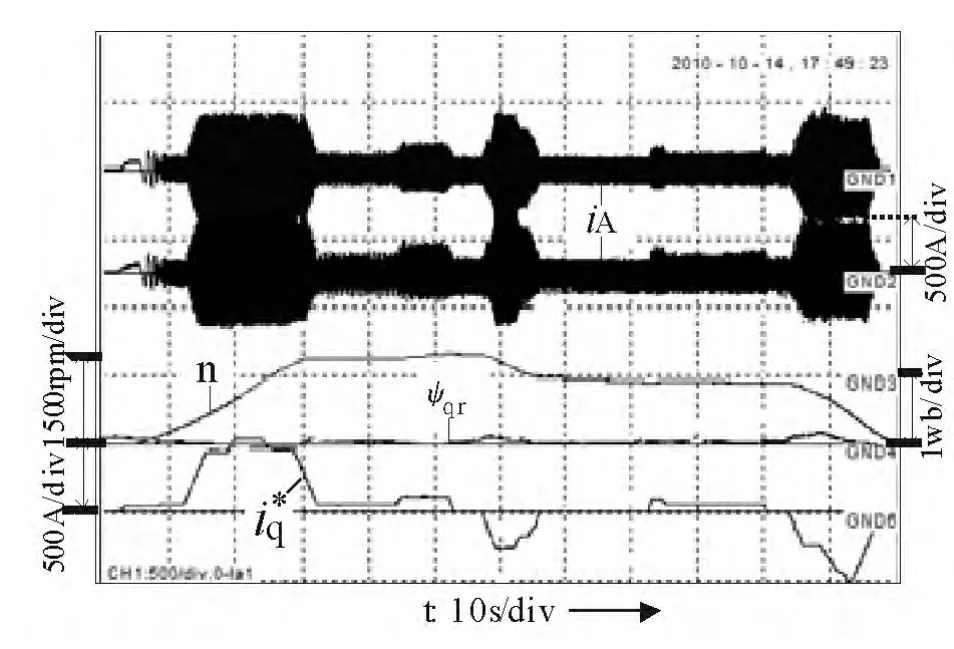
图8 不同工况下电机控制策略验证实验波形Fig.8 Verification experiment waveform of motor control strategies under different working condition
6 结束语
本文主要从牵引变流器的主电路、控制系统和控制策略3方面介绍了面向地铁车辆牵引电机的车载变流系统设计方案。结合理论计算和仿真模型确定了实际器件的各项参数。采用间接矢量控制策略,获得了良好的电机动态特性。最后利用仿真和实验证明了该设计方案的正确性和合理性。
[1]刘小舟,杨正理.地铁牵引变流器的建模与仿真[J].中国电子商务,2012,(18):201-203.LIU Xiao-zhou,YANG Zheng-li.Metro traction converter converter modeling and simulation[J].China's E-Commerce,2012,(18):201-203.
[2]陈广泰.机车牵引变流器预充电电阻的参数设计与仿真[J].内燃机车,2009,(12):18-20.CHEN Guang-tai.The parameter design and simulation of the pre-charge resistance in the locomotive traction inverter[J].DIesel Locomotives,2009,(12):18-20.
[3]王彬,裴冰,马连凤.大功率牵引变流器用预充电电阻的仿真计算分析[J].铁道技术监督,2010,38(6):40-43.WANGBin,PEIBing,MALian-feng.Thesimulation calculation analysis for pre-charge resistance of high power traction converter[J].Railway Quality Control,2010,38(6):40-43.
[4]刘志刚.电力电子学[M].北京:清华大学出版社,2004.
[5]陈湘令.HXD 1型机车变流技术与应用器中的直流支撑电容[J].电气技术,2011(12):77-79.CHEN Xiang-ling.Discussion on type HXD1 locomotive converter DC capacitor support[J].Electrical Engineering,2011(12):77-79.
[6]仝鑫.管轨运输系统直线电机牵引变流器研究[D].北京:北京交通大学,2011.
[7]Bimal K.Bose著.王聪等译.现代电力电子学与交流传动[M].北京:机械工业出版社,2005.
[8]朱文渝,姚娅川.基于Matlab的异步电动机间接矢量控制系统研究[J].磁性材料及器件,2010(5):67-75.ZHU Wen-yu,YAO Ya-chuan.Research on indirect vector control system of asynchronous motor based on matlab[J].Journal of Magnetic Materials and Devices,2010(5):67-75.
猜你喜欢
防爆电机(2021年1期)2021-03-29
测控技术(2018年2期)2018-12-09
电测与仪表(2016年8期)2016-04-15
电测与仪表(2016年10期)2016-04-12
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年16期)2015-04-12
电机与控制应用(2015年10期)2015-03-01
电测与仪表(2014年17期)2014-04-04
