
基于恒虚警率的双阈值检测方法∗
2015-01-23 02:48
雷达科学与技术 2015年2期
(海军航空工程学院信息融合技术研究所,山东烟台264001)
0 引言
对海导航雷达视频图像经过预处理(包括平滑去噪和背景移除)以后,舰船目标表现为亮度(灰度值)较高的区域,而海面背景表现为较暗的区域,舰船目标的检测即是暗背景下亮目标的检测问题[1-3]。利用舰船目标和周围海域所表现出灰度特征差异,可以通过对雷达视频图像的阈值分割[4-5]实现目标检测。简单的阈值处理是将大于阈值T的点作为对象标注,其他点作为背景点置零,从而实现对目标的提取。
常用的阈值处理方法有全局阈值和局部阈值两种处理思路[6-9]。全局阈值针对背景灰度值恒定,所有目标与背景对比度相似的图像使用,用固定的阈值来对整幅图像进行门限选择,快速简单地实现目标的检测;局部阈值针对背景的灰度值分布不均匀,目标与背景对比度相差较大的图像使用,常用的处理方法是针对各个区域局部进行预处理补偿图像,然后再进行全局阈值检测,该思路算法复杂,处理时间长。
对海导航雷达视频图像由于其成像特点和扫描环境,背景灰度值分布不均匀,不同距离、不同环境下目标与背景的对比度不尽相同,本文结合全局阈值和局部阈值处理思路,综合全局阈值处理速度快、算法简单,局部阈值处理精度高的优点,提出一种基于恒虚警率的双阈值检测方法。该方法针对对海导航雷达视频图像目标检测的特点和要求,能够快速、准确地进行目标检测。
1 基于恒虚警率的双阈值检测方法
1.1 基于恒虚警率的阈值检测
在对海雷达视频图像中,经过预处理后,目标检测问题主要是暗背景下亮目标的检测问题,则该图像可以看成仅包含两个主要灰度级区域:由杂波构成的暗灰度区域和由目标构成的亮灰度区域,如图1所示。我们将这些值看成随机量,并将其直方图看成其概率密度函数(PDF)的估计p(z)。目标检测的实质上是选择一个合适的阈值T,并满足式(1),使图像在满足虚警率为Pf的前提下分割为两个可区分的区域。


图1 两个区域的灰度级概率密度函数
假设对海雷达视频图像经过地物杂波移除和平滑去噪以后,图像背景杂波为均匀分布的,则图像背景杂波的概率密度服从均值为μ方差为σ2的高斯分布。即

选择阈值为T,则虚警率Pf为

通常我们希望虚警率越低越好,设定Pf≤1 0-6,查表可得

由式(4)可知,只要计算对海导航雷达视频图像预处理后背景图像的均值和方差,就可以确定出阈值T,使其满足恒定的低虚警率。
1.2 双阈值检测方法
由对海雷达视频图像特点和要求分析可知,单独进行全局阈值处理或者局部阈值处理不能很好地满足图像检测要求,本文算法将两者结合在一起,如图2所示,首先选择全局阈值T1,将弱杂波背景去除,得到可能的目标点;然后对每个目标进行局部阈值处理,选择阈值T2,进一步将目标与背景分割。

图2 双阈值检测算法流程
1.2.1 全局阈值T1
对于经过预处理的对海雷达视频图像,首先进行全局阈值处理,即选定一个门限阈值T1,对整幅图像进行式(1)的处理,经过全局阈值处理,得到疑似目标。对海雷达视频图像经过预处理,理论上图像仅为背景杂波与目标的线性相加。但是由于雷达成像结果受距离影响,并且不同环境的背景复杂程度不尽相同,不同区域的背景灰度均值和方差也有较大差别。
为保证目标全部检测出来,本算法选取均匀背景区域的均值和方差为参数求取全局阈值T1。在经过预处理的对海雷达视频图像中选取无目标的均匀背景区域,如图3所示,分别求取均值和方差,获得其平均值,以此来作为系统的全局阈值。

图3 对海雷达视频图像
在研究实验中发现,均匀背景求取的全局阈值与整幅图像的均值和方差存在关系。设全图的均值为μ1,方差为σ1,获得全局阈值的公式为T′=μ1+kσ1,分别取k为2.5,3和3.5,而经过均匀背景选取的全局阈值为T1。比较25帧图像处理结果如图4所示,当k=3时与T1较为接近。为简化算法,选取全图的均值和方差为参数设定全局阈值。


图4 均匀背景求取全局阈值与全图均值方差关系
1.2.2 局部阈值T2
经过全局阈值处理的图像,滤除了大部分背景杂波,但对于背景杂波强度大,与目标的对比度小,整体灰度值高的区域,无法用取自于均匀背景的全局阈值将其与目标分割开来。为使不同背景下的疑似目标准确地检测出来,分别求取不同区域内的背景的阈值进行处理。
局部阈值选取方法如下:
以疑似目标的重心为中心,以其外接最小矩形为保护窗口,以外接矩形长宽2倍形成的矩形为目标窗口,并以目标窗口除保护窗口之外的区域为参考窗口,如图5所示。本文认为参考窗口的区域为该目标的背景区域。求取参考窗口的均值和方差,代入式(4),得到局部阈值。对目标窗口进行式(1),用阈值进行图像分割,检测目标特征信息,实现对该目标的检测。依次遍历所有疑似目标,即可得到所有目标的特征信息,实现目标检测。
2 实验验证
本文采用民用导航雷达(JRC)采集的图像作算法验证。图6为该导航雷达采集的某帧原始图像,本文针对该数据用Matlab7.0作数据处理。
对海导航雷达视频图像由于其成像特点和扫描环境,舰船目标存在一定特点,由雷达原始图像(图3)可以分析得出:
(1)不同距离、不同环境下的背景灰度值不同,如图3中实验区域一和实验区域二中的背景杂波不同,实验区域一背景灰度较为均匀,而实验区域二背景区域杂波较多。
(2)不同距离、不同环境下目标与背景的对比度不同,如图3中实验区域一和实验区域二中的目标与背景对比度不同,实验区域一目标与背景对比度高,而实验区域二中目标与背景对比度较低。
(3)不同距离、不同环境下不同目标的灰度值也不尽相同,如图3中实验区域一和实验区域二中的目标灰度值不同。相似背景区域内不同目标的灰度值也不相同。
由于图像数据量较大,仅展示部分切片的处理结果。从工程使用角度出发,本文对雷达图像数据分别进行全局最优阈值Otsu算法和本文算法进行处理,便于分析比较。
为保证实验效果,本文选取图3中均匀背景区域和强干扰背景区域的目标分别进行全局最优阈值Otsu算法和本文算法进行处理,结果展示如图6~14所示。
由图6到图14可以看出:
(1)经过全局阈值处理,均匀背景区域的目标能较好地与背景分割开来,实现目标检测;而强干扰背景区域的目标淹没在强干扰背景中,无法与背景分割实现目标检测。
(2)经过局部阈值处理,均匀背景区域的目标变化不大,依然保持原有的目标形态特征,边缘清晰,细节明显,能进行图像分割实现目标检测;强干扰背景区域的目标能够从强干扰背景中分离出来,边缘明显,能进行图像分割实现目标检测。
(3)经过Otsu算法处理,均匀背景区域的目标能较好地实现目标检测,但是强干扰背景区域的目标淹没在背景中,无法与背景分割实现目标检测。而本文算法能实现不同背景区域内的目标检测,优于Otsu算法。
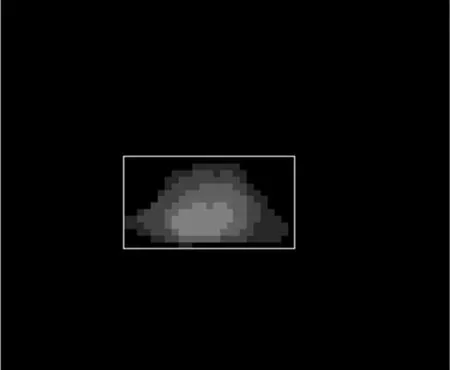
图6 均匀背景区域目标原始图像

图7 均匀背景区域目标经过Otsu算法检测

图8 均匀背景区域目标经过全局阈值检测
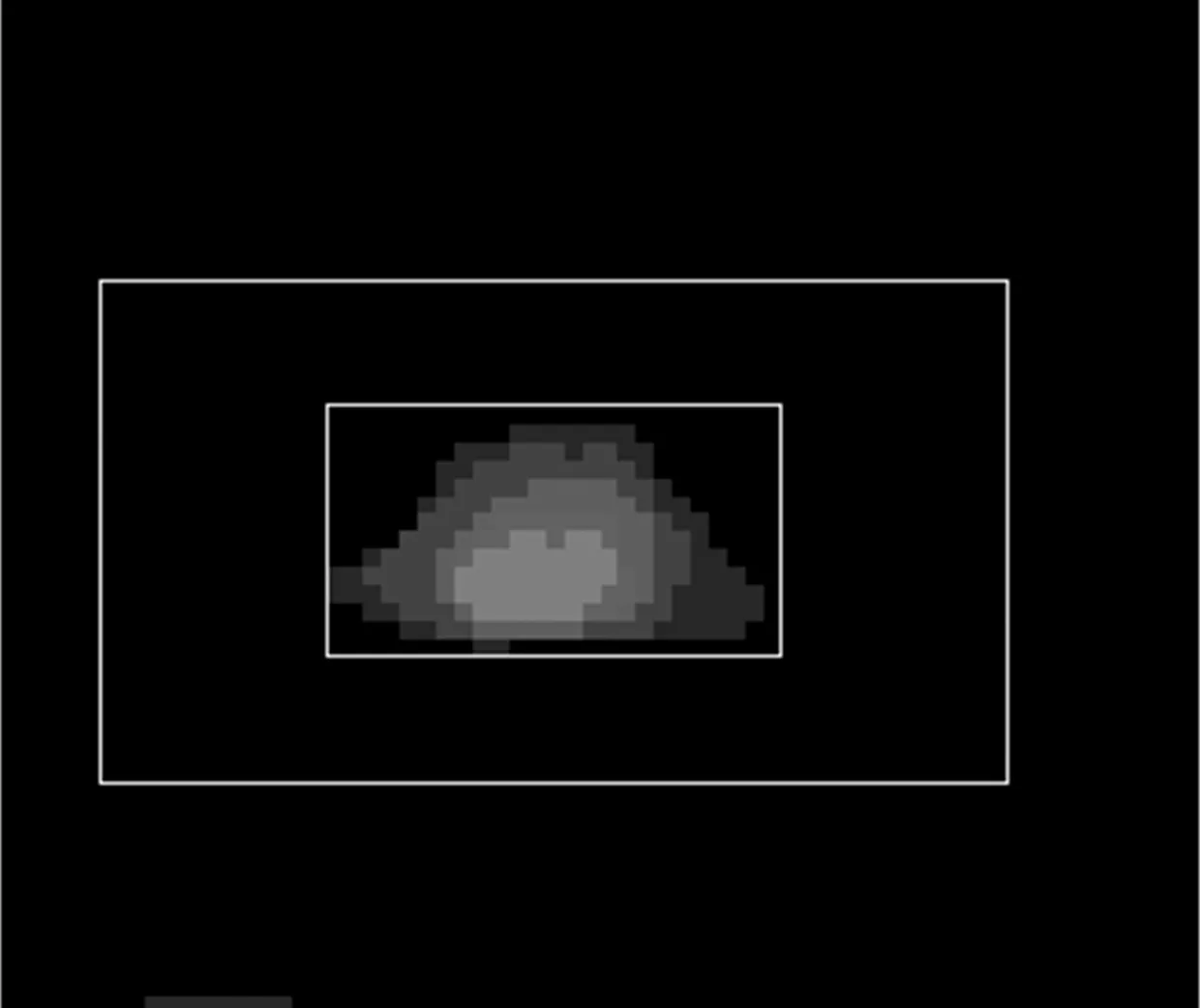
图9 均匀背景区域目标经过局部阈值检测
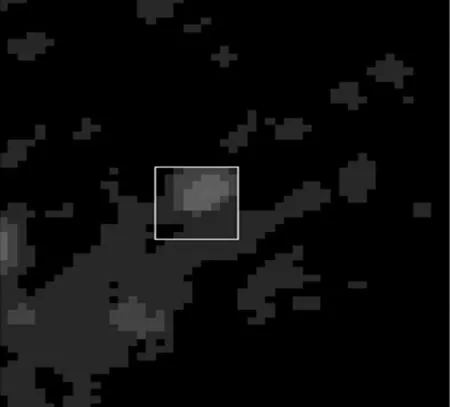
图10 杂波背景区域目标原始图像

图11 杂波背景区域目标经过Otsu算法检测

图12 杂波背景区域目标经过全局阈值检测

图13 杂波背景区域目标经过局部阈值检测

图14 基于恒虚警率的双阈值检测算法处理结果
3 结束语
本文提出了一种基于恒虚警率的双阈值目标检测方法。针对对海导航雷达视频图像特点和处理要求,在保证低虚警率要求的前提下结合全局阈值处理和局部阈值处理思路,用双阈值处理方法解决不同背景下目标的检测问题。经过实测数据的验证,本算法简单快速,检测精度高,满足对海导航雷达视频图像目标检测处理要求。
[1]艾加秋.基于灰度相关性的SAR图像联合CFAR舰船检测算法[J].雷达科学与技术,2014,12(2):149-155,160.
[2]孙宏岩.基于边缘特征的SAR图像目标检测方法[J].雷达科学与技术,2013,11(5):462-468.
[3]徐蔚然.基于视频处理的雷达图像目标检测与跟踪研究[D].大连:大连理工大学,2000.
[4]GONZALEZ R C,WOODS R E.Digital Image Processing[M].2nd ed.[S.l.]:[s.n.],2007:305-307.
[5]章毓晋.图像分析[M].2版.北京:清华大学出版社,2005:73-136.
[6]高晶,孙继银,吴昆,等.基于形状特征的红外目标检测方法[J].激光与红外,2013,43(1):49-53.
[7]张永,刘巧玲.基于自适应阈值的运动目标检测方法[J].计算机工程与应用,2012,50(12):166-168.
[8]杨斯涵.基于自适应尺度的小目标检测方法[J].光电工程,2014,41(4):9-16.
[9]王莹莹,何苹,李永宾,等.基于属性直方图的快速Otsu红外目标检测算法[J].激光与红外,2014,44(5):577-582.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2022年6期)2022-07-02
科学与信息化(2021年30期)2021-12-24
天津医科大学学报(2021年1期)2021-01-26
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
雷达与对抗(2020年1期)2020-06-05
中国信息技术教育(2020年2期)2020-02-02
金桥(2018年4期)2018-09-26
