
捷联式双天线稳定平台设计及坐标系变换∗
2015-01-23 02:48
雷达科学与技术 2015年2期
(中国电子科技集团公司第三十八研究所,安徽合肥230088)
0 引言
近年来,弹载SAR制导技术已成为SAR技术应用的又一重要方面[1]。对于导弹的制导来说,如果能通过装载在导弹上的SAR获取目标或目标附近典型地物地貌特征信息,形成实时图,并与预先准备好且存储在导弹中的基准图(含位置信息)进行图像匹配,从而控制导弹精确命中目标,则可大大提高导弹的攻击能力[2]。弹体的角运动和质心运动,以及外部载荷如风、气流等引起的扰动力矩会通过多种方式耦合到导引头天线上,严重影响天线的稳定与跟踪,为了实现可靠、高精度的目标跟踪,必须采用稳定平台来隔离弹体扰动[3]。在体积有限制的战术导弹应用中,为了消除弹体姿态变化对目标测量的影响,往往采用捷联稳定平台[4-5]来实现天线稳定。
1 天线稳定平台设计
捷联稳定平台是指导引头上取消陀螺元件,利用弹上捷联惯导的姿态信息,通过坐标变换和数学解算方法来达到视线稳定目的的一种基于数字补偿的控制平台,其核心是数学稳定算法[6-7]。
在设计天线稳定平台时,通常采用三轴稳定平台分别对应弹体姿态角度(俯仰角、横滚角、偏航角)的变化。当导引头舱内空间有限时,三轴伺服平台在大姿态角的情况下易出现干涉现象,根据力学仿真结果,基座的振动量级传递到轴系会放大2~3倍,从而造成第三轴在遇到强烈振动和过载时产生震荡,造成整个系统不稳定。基于以上考虑,将天线稳定平台设计为捷联式两轴稳定平台,采用方位、俯仰两自由度万向支架结构,天线安装在内框轴上,可以绕方位轴和俯仰轴运动。方位、俯仰通道均采用直流力矩电机加旋转变压器的直接驱动型式,驱动天线运转并形成速度与位置闭环控制。平台方位环可360°旋转 ,平台俯仰环因结构空间限制对角度范围进行机械限位和软件限位。弹体在3个方向的姿态变化分解到天线稳定平台的方位轴(外框)和俯仰轴(中框)。天线稳定平台框架如图1所示。
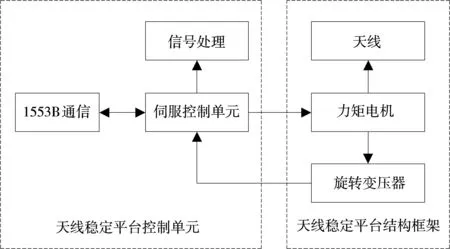
图1 天线伺服平台结构框图
惯导系统输出的位置、速度和姿态信息通过1553B总线传递给天线稳定平台控制系统。在接收控制指令后,天线稳定平台控制系统采用惯导系统精确测量的弹体航向、姿态等信号作为参考基准,通过坐标变换控制天线稳定平台隔离载体的角运动,稳定天线指向控制角度;利用惯导提供的瞬时速度和加速度信号完成运动补偿。
2 SAR天线稳定平台系统坐标系定义
在SAR工作过程中,主要角度关系涉及到目标、导弹及天线稳定平台,其定义如下:
(1)目标坐标系OXYZ:以目标中心为原点,Y轴为过原点的法线方向,向天为正。X轴沿航向方向为正,Z轴符合右手系定则。
(2)弹体坐标系OX d Y d Z d:以弹体重心为原点,X d轴沿导弹纵轴指向导弹头部。Y d轴在导弹纵向对称面内,垂直于X d轴,指向下为正。Z d轴由右手系定则确定。
(3)伺服平台坐标系OX s Y s Z s:以SAR伺服平台转动中心为原点。与弹体坐标系的三轴分别平行,X s轴指向-Y d轴,Y s轴指向X d轴,Z s轴指向Z d轴。
弹体在目标坐标系中的姿态角定义为φ,ψ,γ,转换次序为俯仰、偏航、滚动。目标中心坐标系与弹体坐标系间的转换矩阵为


图2 目标坐标系与弹体坐标系的位置关系
3 坐标变换原理
伺服平台转角确定SAR测量坐标系与弹体坐标系间的位置关系,当伺服平台转角处于零位时SAR测量坐标系的三轴与伺服平台坐标系的三轴重合。伺服平台由零位开始依次转动外框θy(绕Y s轴正向)、中框θz(绕Z′s轴正向)、内框θx(绕X s轴正向),则伺服平台坐标系与SAR测量坐标系间的转换矩阵为

在SAR测量坐标系中定义前视角、下视角。按照SAR测量坐标系中波束前视角θq、下视角θf的定义顺序,将天线坐标系的波束指向旋转到目标中心坐标系:
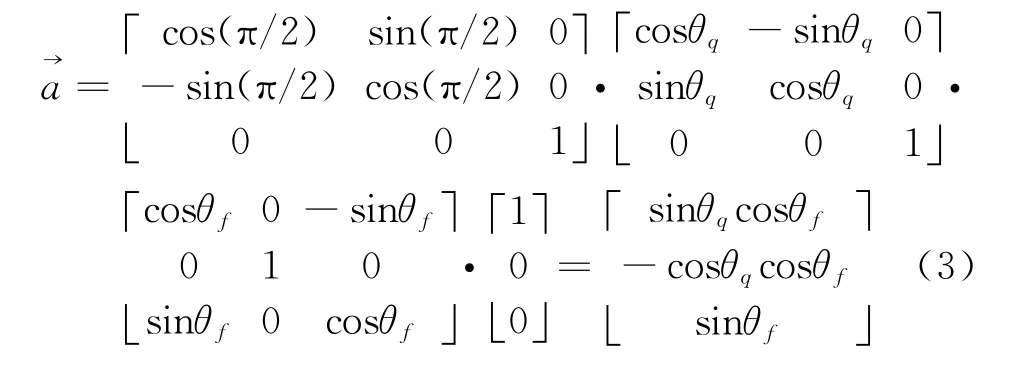
由于本天线稳定平台只有两轴,按照伺服平台转角θy(外框),θz(中框)顺序,将天线坐标系的波束指向旋转到目标中心坐标系。弹体姿态角定义为航向角φ,俯仰角ψ,横滚角γ。

由式(5),根据波束前视角、下视角和弹体姿态角,通过坐标变换,解算出天线稳定平台的内框角及外框角,将波束指向转变为伺服平台转角并隔离弹体姿态运动。
4 同轴双天线设计
在作用距离远时,为保证天线增益,天线必须足够大 ,在作用距离近时,为保证成像带宽度,在仰角大范围变化时,必须考虑天线是否和舱壁出现干涉,此时,天线尺寸必须减小。
为满足上述要求,采用两个长度尺寸不同的平板裂缝阵列天线,两个天线成60°夹角安装。在伺服控制程序中,必须随工作模式实时切换天线,而控制程序中只能驱动两个轴转动,无法分辨两个天线谁需要工作。根据不同的坐标公式来建立大(小)天线与平台双轴之间的关系,故在伺服控制程序中,大、小天线切换工作就是调用不同的坐标变换公式。
5 小天线坐标变换算法
小天线面与大天线面的夹角为60°,以大天线为基准确立坐标系和坐标零位,在计算小天线时,先将小天线测量坐标系转换至大天线测量坐标系,然后再转换至伺服坐标系。按照前视角θq、下视角θf的定义顺序,将小天线坐标系的波束指向旋转到目标中心坐标系:

由式(7),根据波束前视角、下视角和弹体姿态角,通过坐标变换,解算出小天线工作时稳定平台的中框角及外框角,将波束指向转变为伺服平台转角并隔离弹体姿态运动。
6 结束语
两轴天线稳定平台反应3个姿态变化是在某个姿态角变化较小时才能实现,在实际应用过程中,两轴天线稳定平台的可行性、稳定性和环境适应性经过了试验考研,证明了该方法确实有效。同轴双天线设计方式解决了不同工作状态下对天线不同需求的问题,在设计过程中,由大天线或小天线建立基准坐标系,将另外一个天线坐标系先旋转到基准坐标系下,然后再进行坐标变换。大、小天线的切换就是调用不同的坐标变换公式。
[1]赵振波,张刚,李相平.基于遗传算法的弹载SAR弹道优化设计[J].雷达科学与技术,2012,10(3):257-261.
[2]郑陶冶,俞根苗.弹载SAR脉冲重复频率设计研究[J].雷达科学与技术,2010,8(3):217-222.
[3]周瑞青,吕善伟,刘新华.捷联式天线稳定平台动力学建模与仿真分析[J].北京航空航天大学学报,2005,31(9):953-957.
[4]RUDIN R T.Strapdown Stabilization for Imaging Seekers,AIAA-93-2660[R].Naval Air Warfare Center Weapons Division China Lake,1993:1-10.
[5]KENNEDY P J,KENNEDY R L.Direct Versus Indirect Line of Sight(LOS)Stabilization[J].IEEE Trans on Control Systems Technology,2003,11(1):3-15.
[6]贾筱媛,赵超.半捷联稳定控制方案与制导信息提取方法[J].红外与激光工程,2011,40(12):2474-2479.
[7]孙彪.相控阵雷达导引头捷联去耦数字平台设计[J].电子设计工程,2012,20(13):79-82.
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10
兵器装备工程学报(2022年4期)2022-05-09
新技术新工艺(2022年3期)2022-04-02
爆炸与冲击(2022年2期)2022-03-17
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
福建基础教育研究(2019年6期)2019-05-28
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
