
永磁同步电机的状态解耦控制研究
2015-03-10 06:36彭显刚
黑龙江电力 2015年4期
杨 贵,彭显刚
(广东工业大学 自动化学院, 广州 510006)
永磁同步电机的状态解耦控制研究
杨 贵,彭显刚
(广东工业大学 自动化学院, 广州 510006)
针对永磁同步电机系统耦合问题,通过Park和Clarke坐标变换得到基于d-q轴坐标模型,建立了永磁同步电机的非线性状态方程数学模型。应用反馈解耦控制控制方法,实现了永磁同步电机相电流和相电压的解耦控制。仿真结果表明,状态反馈解耦控制方法有效地实现了电机相电压、相电流的解耦控制,且具有较好的动静态性能及灵活、方便特点。
永磁同步电机;解耦;反馈控制
稀土永磁材料的发展及电力电子技术的进步,促进了永磁同步电机的发展[1, 2]。永磁同步电机具有气隙磁密度高,体积小,功率因数高,起动转矩大等特点,在工业自动化、数控机床、铁路运输、船运领域得到了广泛应用[3-5]。近年来,许多新的非线性系统控制方法用于永磁同步电机的解耦,如自适应控制、模糊神经网控制、智能解耦、逆系统解耦控制[6-10]。但自适应解耦、智能解耦理论尚不完善,在工程应用中,由于算法太复杂难以实现较好的解耦[8, 11]。逆系统解耦控制对于低阶系统,静态解耦比较简单,但对于高阶系统求逆十分困难。因此,寻找简单易行的有效解耦方法是现在普遍关注的问题[12]。工程上,目前主要采用矢量控制技术实现解耦,现研究成熟的矢量控制解耦技术有:前置补偿解耦方法,前置矩阵对角化系统解耦方法。前置补偿矩阵局限于单定子永磁同步电机,前置矩阵对角化系统解耦对原系统矩阵必须为非奇异矩阵[9]。鉴于此,本文提出一种有效的矢量控制策略,即对永磁同步电机进行坐标变换,得到在d-q轴为坐标的数学模型的状态方程,再应用状态反馈控制策略实现解耦[13]。最后在Matlab-Simulink平台上建立仿真永磁同步电机模型,验证状态反馈解耦控制方法在永磁同步电机上的解耦效果。
1 状态反馈解耦控制
解耦控制是通过一定的控制算法将控制对象中的输入输出耦合消除使控制对象中的输出仅受相应自身输入的控制。一个线性时不变系统用反馈解耦控制方法来解耦[9-10], 引入反馈解耦矩阵F和输入变换矩阵G,多变量状态反馈解耦原理如图1所示。
U=FX+GU′
(1)
式中:U′ 表示新的“m”维输入控制矢量。
解耦得:

Y=CX
(2)
其中,X∈Rn,U∈Rm,Y∈Rm,w∈Rm,m≤n状态反馈解耦控制方法,可以存在多个{F,G}解。解的获得取决于所需要的传递函(Hi(p),i=1,2…m)。F为m×n维矩阵,G为m×m维矩阵。

图1 多变量状态反馈解耦原理图
Fig.1 Schematic diagram of the multi variable state feedback decoupling
由图1可得到,设定新的系统传递函数Hdiag为
此传递函数实现了永磁同步电机相电压相电流一一对应关系,实现了系统解耦。
2 应用在三相永磁电机的状态反馈解耦控制
永磁同步电机通过坐标变换,使其为直流电动机。矢量控制技术利用坐标变换方法,实现了电机定子力磁分离与转矩的解耦。三相永磁电机的坐标变换原理如图2所示[14]。
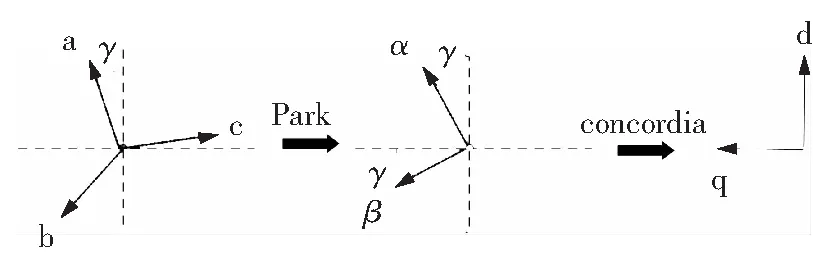
图2 坐标变换原理图

(3)
可看出d-q轴电流分量Id、Iq相互耦合,不便于电流控制。应用状态反馈控制解耦技术可解决此问题,式(3)中的模型变化等效同:
(4)
{F,G}的求解基于以下条件[15-16]:
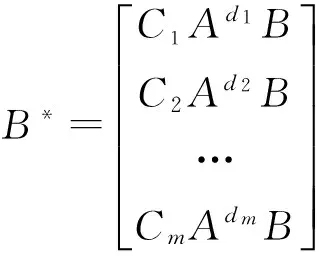
(5)
di是非负整数且满足条件:
di=min{j:CiAjB≠0;j=0,1,…,n-1} 或di=n-1若CiAjB=0,Ci是输出矩阵C的第i行行向量。
对F,G解耦系统,其中一个解可定义如下:
F=-B*-1A*
G=B*-1
(6)
由式(4)—式(6)得到:
d1=d2=0
则原系统变为:

Y*=U′
(7)
di+1为相关系数
在此三相永磁同步电机中可得:
(8)
由图2 和式(8)得到三相永磁同步电机等效解耦系统如图3所示。
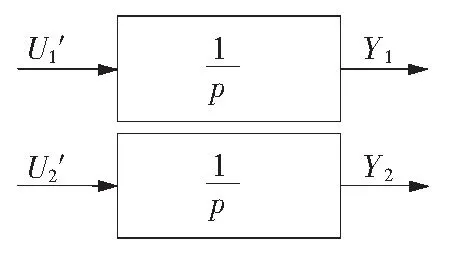
图3 三相永磁同步电机等效解耦系统
Fig.3 Equivalent decoupling system of three phases PMSM
通常情况下,{F,G}解耦定义为:
(9)
由式(4)及式(9)可求得:
Q1(F)、Q2(F)的秩均是1,满足条件,且B*是非奇异矩阵,满足{F,G}能对原系统实现解耦的条件。
由于{F,G}解集不唯一,那么必然在F中存在自由因子,可以用来满足设计需求,如可以任意设定闭环系统的极点。任意设定的极点个数p定义为
(10)
其中一个特定的解可定义为
(11)
G=B*-1
k=0,1…δ;δ=maxdi;i=1,2…m
由式(10)和(11)得到的矩阵F,G和p的个数如下:
(12)

则系统的传递函数
三相永磁同步电机转换成一个稳定的解耦系统为
3 双定子永磁同步电动机的动态模型
经过Park和Clarke坐标变换,基于d1d2q1q2轴的永磁同步电机模型为

(13)
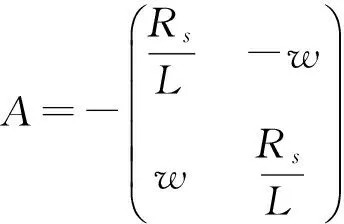
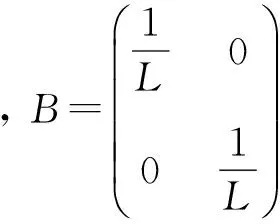
在此A、B矩阵对应定义为:
式中:Rs、L和Lm分别为电阻、自感和互感。

4 状态反馈控制解耦方法在双定子永磁同步电机中的应用
永磁同步电机耦合系统传递函数为
H=(sI-A)-1B
(14)
其中I是2×2单位矩阵,H是电机系统的传递函数。
设定期望中的对角化解耦系统Hdiag为:
为保持与原耦合系统相同的时间常数,定义τ=L/Rs
推导得F,G为:
应用状态反馈解耦控制,系统变为:
此传递函数实现了电流输出由对应电流输入对应控制,实现了双定子电机的解耦。
5 实验仿真
实验基于Matlab-simulink平台下双定子永磁同步电机的仿真,电机实验参数为:Rs=17.5 Ω,L=53 mH,Lm=26 mH,两定子夹角Υ=π/6, 转速ω=100π rad/s。电流初始数值均为零,在不同时刻因负载的改变而改变其电流值。电流变换参数如表1所示。

表1 仿真电流变化参数表
反馈控制解耦方法的双定子永磁同步电机的仿真结果如图4所示。
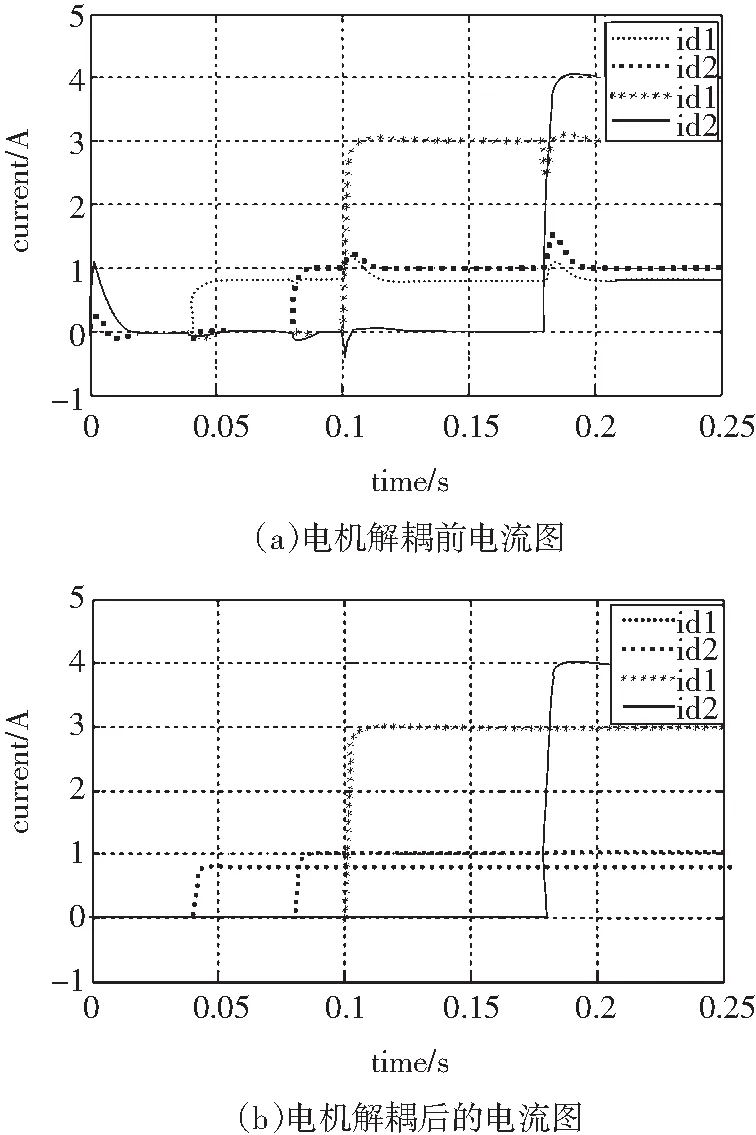
图4 双定子永磁同步电机的仿真结果
Fig.4 Simulation results of double stator permanent on magnet synchronous motor
从图4解耦前后可知,解耦前,任一项电流的变化都会影响另外三项电流的数值,影响时间约0.02 s, 解耦后,任一项电流的变化都不会影响另外三项电流的数值。状态控制解耦方法有效地解决了耦合问题。
6 结 语
由上述分析和实验结果得知,状态解耦控制有效解决了感应电机的非线性、强耦合问题,并使得四阶的双定子永磁同步耦合电机转变为一阶解耦系统。应用此方法不需要计算对于干扰非常敏感的电流微分分量。状态解耦控制方法的应用范围比前置解偶矩阵广泛,可以通过任意设定极点位置而建立不同响应时间常数下的系统模型,灵活性高,且不受对象耦合矩阵是否为非奇异矩阵的约束。并且在工程上有效解决了耦合问题。
[1] 王鑫,李伟力,程树康. 永磁同步电动机发展展望[J]. 微电机. 2007(05): 69-72. WANG Xin, LI Weili, CHENG Shukang. Development and prospect of permanent magnet synchronous motor [J]. Micromotors, 2007(05): 69-72.
[2] 黄伟忠,宋春华. 永磁交流伺服电机国内外市场概况[J]. 微特电机. 2009, 37(1): 59-62. HUANG Weizhong, SONG Chunhua. Summary of domestic and international market of permanent magnet AC servo motor [J]. Small & Special Electrical Machines, 2009, 37(1): 59-62.
[3] DURAN M J, KOURO S, WU B, et al. Six-phase PMSG wind energy conversion system based on medium-voltage multilevel converter[Z]. IEEE, 2011-10.
[4] YIFAN ZHAO and LIPO T A. Space vector PWM control of dual three-phase induction machine using vector space decomposit-ion[J]. IEEE Transactions on Industry Applications. 1995, 31(5): 1100-1109.
[5] ANDRIOLLO M, BETTANINI G, MARTINELLI G, et al. Analysis of Double-star permanent-magnet synchronous generators by a general decoupledd-qmodel[J]. IEEE Transactions on Industry Applications. 2009, 45(4): 1416-1424.
[6] 范邹. 三相电压型PWM变流器的线性化状态反馈解耦控制[J]. 通信电源技术. 2008,25(1):0032-0035. FAN Zou. Linear state feedback decoupled control for three-phase voltage source PWM converter [J]. Telecom Power Technologies, 2008,25(1):0032-0035.
[7] 董英,宋文祥,尹赟,等. 基于内模控制的三电平PWM整流器控制方法[J]. 电气传动. 2012(02): 44-47. DONG Ying, SONG Wenxiang, YIN Yun, et al. Control strategy of level PWM rectifier based on internal model control [J]. Electric Drive, 2012(02): 44-47.
[8] 达成莉. 多变量系统解耦现状的分析[J]. 工业控制计算机. 2011, 24(12): 69-71. DA Chengli. Current situation and development of decoupling control on MIMO system [J]. Industrial Control Computer, 2011, 24(12): 69-71.
[9] BENKHORIS M F, TALI-MAAMAR N, TERRIEN F. Decoupling algorithm in view of multivariable electrical drives cont-rol[Z]. 2002: 6, 4861-4866.
[10] 钟天云,毛洁,周扬忠. 基于逆系统解耦永磁同步电动机直接转矩控制[J].福州大学学报:自然科学版.2014(2):258-264. ZHONG Tianyun, MAO Jie, ZHOU Yangzhong. DTC for permanent magnet synchronous motors based on inverse decoupling control [D]. Journal of Fuzhou University: Natural Science Edition, 2014(2): 258-264.
[11] 周志刚. 一种感应电机的解耦控制方法[J]. 中国电机工程学报. 2003, 23(2): 121-125. ZHOU Zhigang. A induction motor de-couple control method [J]. Proceedings of the CSEE, 2003, 23(2): 121-125.
[12] PARASKEVOPOULOS P N, KOUMBOULIS F N, KOUVAKAS N D, et al. I/O decoupling via dynamic controllers-a state space approach[C]. Limassol: 2005.
[13] 杨明,付博,李钊,等. 永磁同步电动机矢量控制电压解耦控制研究[J]. 电气传动. 2010(05): 24-28. YANG Ming, FU Bo, LI Zhao, et al. Research on voltage decoupling control of vector control for permanent magnet synchronous motor [J]. Electric Drive, 2010(05): 24-28.
[14] 梅国权. 永磁同步电机矢量控制系统的研究与设计[D]. 南京理工大学, 2013. MEI Guoquan. Research and design of vector control system of PMSM [D]. Nanjing University of Science and Technology, 2013.
(责任编辑 郭金光)
Research on state variables feedback decoupling technique for permanent magnet synchronous motor
YANG Gui, PENG Xiangang
(School of Automation, Guangdong University of Technology, Guangzhou 510006, China)
Aiming at the permanent magnet synchronous machine (PMSM) coupling, this paper establishes its nonlinear mathematical model based ond-qaxis after the Park and Clarke transformation. The principle of state variables feedback decoupling technique is applied to realize decoupling control of PMSM phase current and voltage. The simulation results indicate that the technique sloves the coupling problem with the effectiveness which is verified statical and dynamical, flexible and conveninet.
permanent magnet synchronous machine, decoupling, feedback control
2015-01-22。
广东省自然科学基金(10151009001000045)。
杨 贵(1989—),女,在读硕士研究生,从事电机系统建模与控制研究工作。
TM341
A
2095-6843(2015)04-0326-05
猜你喜欢
防爆电机(2022年3期)2022-06-17
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
