
基于Simulink的巡航系统PID控制方法研究
2015-03-22 05:18李凌,曾杰
沈阳化工大学学报 2015年3期
李 凌, 曾 杰
(沈阳化工大学 信息工程学院, 辽宁 沈阳 110142)
基于Simulink的巡航系统PID控制方法研究
李 凌, 曾 杰
(沈阳化工大学 信息工程学院, 辽宁 沈阳 110142)
随着汽车工业的飞速发展和高速公路数量的快速增长,人们对汽车驾驶的安全性和舒适性的要求不断提高,因而,对汽车巡航系统控制方法的研究也越来越受到人们的重视.首先建立汽车纵向运动的数学模型,然后基于Matlab的Simulink工具箱,分别应用常规PID控制和模糊PID控制对所建模型进行仿真研究,比较两种不同控制方法的优缺点.仿真结果表明:在模糊PID控制方案下系统响应速度更快,控制效果更理想.所得结论为巡航系统控制方法的选取提供了参考依据.
巡航控制系统; 建模; PID控制; 模糊PID控制; 仿真
汽车巡航控制系统(Cruise Control System,CCS)又称为汽车定速巡航系统,从20世纪60年代开始发展至今,其发展过程主要有4个阶段,分别是机械控制模式、晶体管控制模式、模拟集成电路控制模式以及微机控制模式[1].目前,国外很多专家都在研究自适应巡航控制系统(ACC,Adaptive Cruise Control System),也称智能巡航控制系统(ICC,Intelligent Cruise Control System).自适应控制系统属于主动安全技术,它是传统的速度巡航控制系统的发展和改进[2-5].国内有许多科研机构和高校也开始对巡航控制系统进行研究.例如,北京理工大学应用PID方法对汽车巡航控制进行的研究、清华大学王俊敏等基于变参数的比例-积分(PI)控制算法研制的汽车数字式巡航控制系统、哈尔滨工业大学建立了基于一汽捷达轿车的动力学模型等等.但总体上,目前国内对汽车巡航系统的研究还不是很成熟[6].
汽车巡航控制系统具有强非线性、时变性、不确定性,并受到外界扰动等影响,运行工况复杂[7],采用传统PID控制很难取得满意的效果.本文介绍了一种基于模糊PID控制算法的汽车巡航控制系统,通过Simulink进行仿真研究,结果表明:模糊PID具有常规PID不可替代的优势.
1 汽车运动学模型
汽车运动学模型主要研究汽车前进方向受力与其运动的关系.现实中汽车在行驶时的受力情况十分复杂,但是在只考虑汽车前进方向受力的情况下,汽车主要受到3种性质阻力:车轮滚动阻力,空气阻力,坡度阻力[8-9].如图1所示.
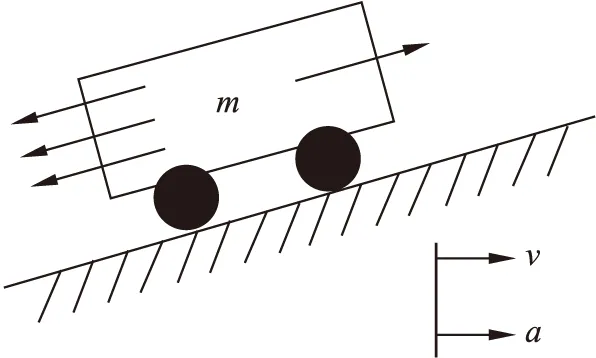
图1 汽车车身受力图
根据牛顿第二定律,汽车运动方程为
δma=Fe-Fw-Ff-Fh
参照《汽车标准汇编:2010》[10],其各参数如表1所示.

表1 参数
代入数据后得到的数学模型:

107.8 sin(0.000 1x)
在Simulink中建立的汽车动力学模型如图2所示.
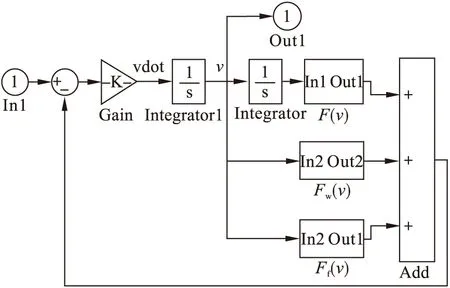
图2 汽车动力学仿真模型
该模型的单位阶跃响应曲线如图3所示.由图3可知:汽车模型对象特性是发散的,所以,要使汽车到达稳态,必须加入控制器,使系统构成闭环.
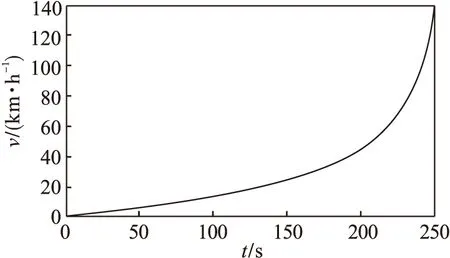
图3 单位阶跃响应曲线
2 巡航系统控制方法
2.1 常规PID控制
PID是比例-积分-微分(Proportional-Integral-Derivative)的英文缩写.其输入是设定值与被控变量的偏差.比例作用使得控制器的输出与偏差成正比,可以快速地使被控变量达到设定值.积分作用把偏差累积起来,通过加大控制器的输出来减少偏差,使得汽车可以保持在稳定的行驶状态.微分作用基于偏差的变化率,起预估的作用.综上,常规PID控制实质是定参数控制,只要设定好了PID参数,系统就会按照以上原则来运作.PID控制是一种结构简单、设置方便的控制方法.
2.2 模糊PID控制
当被控对象较为复杂,表现为强非线性或者时变性时,常规PID控制就会因为参数调整不当而出现不稳定或者振荡的现象.模糊PID此时可以较好地解决这个问题.模糊PID兼顾模糊控制和常规PID控制的作用,其控制参数不固定,相当于对常规PID参数实现了在线实时整定,对于被控对象模型不精确的系统具有很好的控制效果.针对汽车巡航控制系统,模糊控制器的输入为偏差的绝对值和偏差变化率的绝对值,输出为PID控制器的实时调校参数.输入量的论域为[0,5],输出量的论域为[0,0.99].选定输入量的模糊语言变量为零(Z)、小(S)、中(M)、大(B);输出量的模糊语言变量为零(Z)、小(S)、中(M)、大(B);采用三角隶属度函数.
依据经验来确定模糊控制器的输出规律,如表2所示.

表2 KP、KI、KD的控制规则
模糊控制器结合PID控制器后的巡航系统控制结构如图4所示.

图4 模糊PID控制结构图
3 仿真分析
3.1 PID控制仿真
在Simulink环境下建立的巡航系统的PID控制仿真模型如图5所示.

图5 PID控制仿真模型
应用临界比例度法[11]对PID参数进行整定,分以下3步进行:
(1) 在PID模块参数设置中将KI、KD设置为零.
(2) 调节参数KP,使系统的响应为等幅振荡曲线,记录此时的KP和振荡周期T.
(3) 根据KP和T的值,参照表3计算调节器的各个参数.其中δ代表比例度.

表3 临界比例度法整定参数
由上述步骤得出KP=2 000时出现等幅振荡,并且由图6可知振荡周期T=0.6 s.
参照表3,计算得到PID控制的3个参数为KP=1 000,KI=3.3,KD=0.075. 通过仿真发现
临界比例度法计算出来的PID参数对模型进行控制时,存在较大余差,因此,还要进行二次参数调整,加大积分作用.经过二次参数调整后得到PID控制参数KP=1 300、KI=30、KD=3;仿真结果如图7所示,此时调节时间为6.2 s.
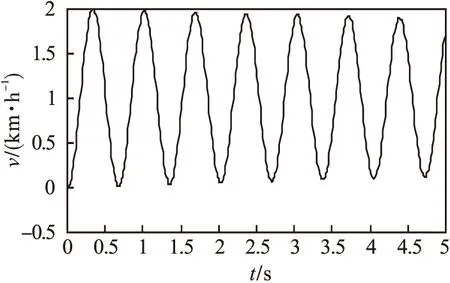
图6 等幅振荡

图7 PID控制仿真结果
3.2 模糊PID控制仿真
在Simulink环境下建立巡航系统的模糊PID控制仿真模型,如图8所示.
鉴于模糊控制的实时参数调整特性,采用衰减曲线法对模糊PID控制的参数进行整定 ,分以下3步进行:
(1) 将比例因子KI、KD设置为零,即只保留比例作用.
(2) 调节参数KP,使系统响应为4∶1的衰减曲线,记录此时的KP和振荡周期T.
(3) 根据Kp和T的值,参照表4计算控制器的各个比例因子.
由上述步骤,当KP=2 500时,得到4∶1的衰减曲线图,并可知振荡周期T=3.4 s.
依据衰减曲线参数并参照表4,计算得到模糊PID控制的3个比例因子分别为KP=3 215,KI=0.98,KD=0.34.仿真结果如图9所示.
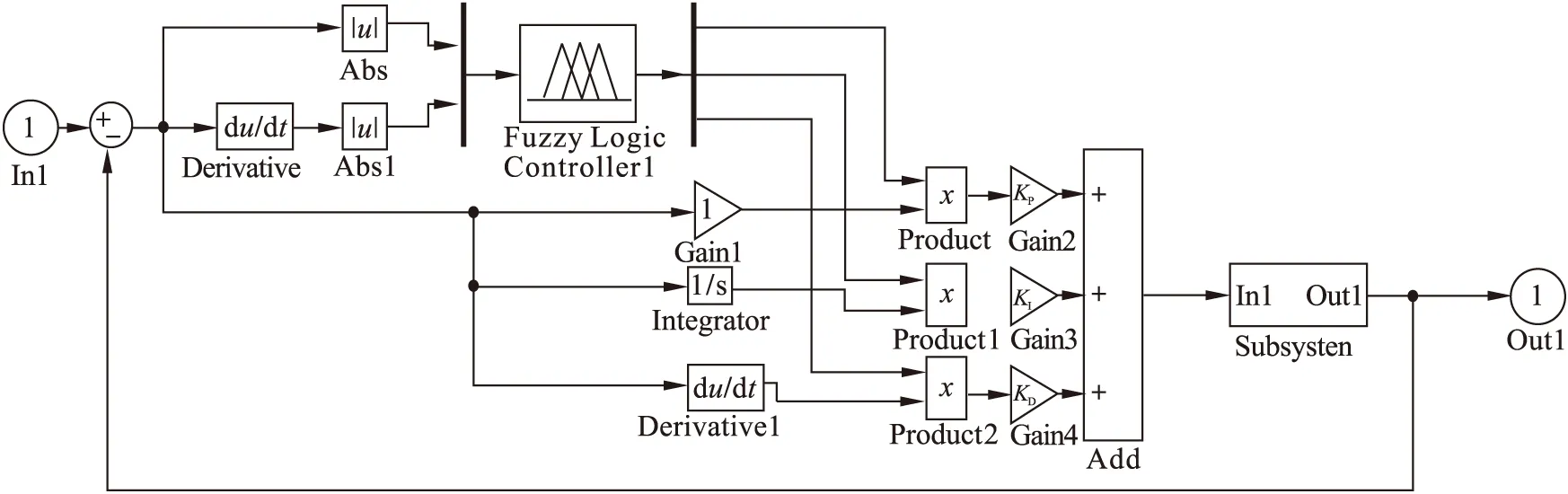
图8 模糊PID控制仿真模型

控制类型比例度值/%积分时间微分时间Pδ0PI1 2δ0 85T0PID0 8δ0 30T0 1T

图9 模糊PID控制仿真结果
同理,通过加大积分作用,对PID参数进行二次整定,得KP=3 500,KI=40,KD=2;仿真结果如图10所示,此时调节时间为3.3 s.

图10 参数整定后模糊PID控制仿真结果
3.3 控制效果比较
经过对两种控制方案仿真研究,可以得到两种控制器的最佳控制参数,如表5所示.

表5 控制器参数
在不同巡航速度下,分别应用常规PID和模糊PID进行控制,效果比较见表6.
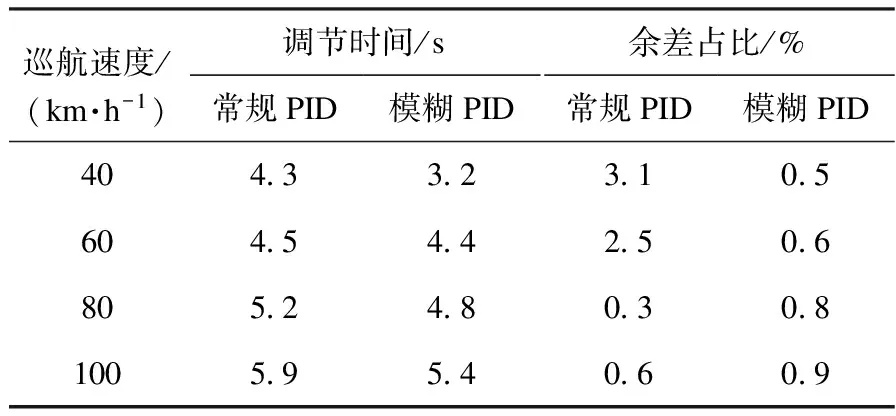
表6 控制效果比较
注:余差占比是偏差与设定值的比
3.4 抗干扰情况比较
应用MATLAB的GUI工具设计了一个仿真平台.整个平台具有以下功能:
(1) 可以在平台上任意输入模糊PID和常规PID的控制参数;
(2) 可以选择不同的巡航速度进行仿真;
(3) 可以加入干扰信号,研究系统的抗干扰情况.
利用该平台可以很方便地进行模糊PID和常规PID的比较.两种控制器的最佳控制参数如表5所示,且巡航速度为20 km/h,无干扰时,仿真结果如图11所示;有干扰时,仿真结果如图12所示.
由此可以看出模糊PID对干扰的响应速度更快,而且抑制速度也更快.
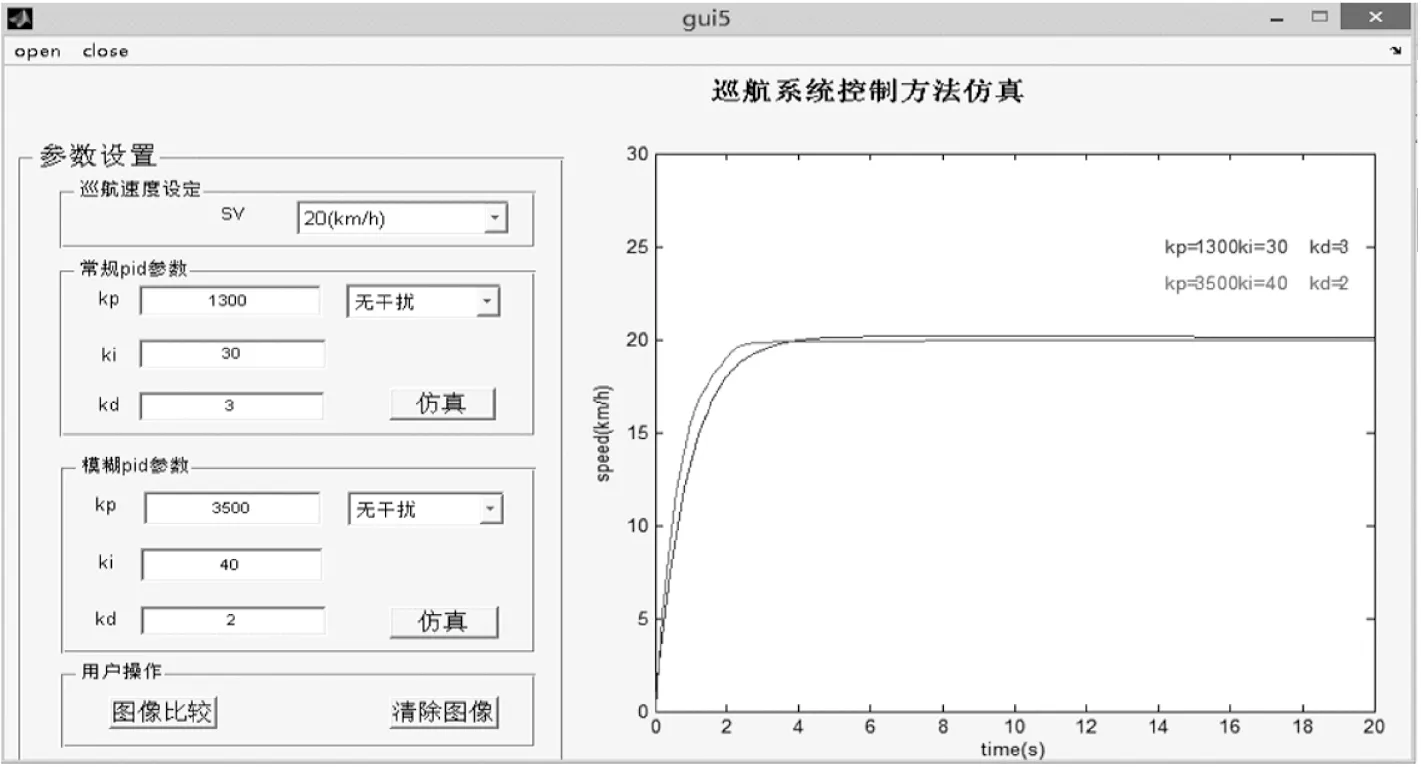
图11 无干扰时的控制结果

图12 有干扰时的仿真结果
4 结 论
通过仿真数据可知在相同的巡航速度下,模糊PID响应速度更快,可以更快达到稳态,而且达到稳态后的偏差更小.但是模糊PID也存在不足,即随着巡航速度的增大,模糊PID控制的余差占比在逐渐的增大,而常规PID控制的余差占比却是在减小.这说明模糊PID对于减少余差还存在不足.但是从实际出发,为了避免汽车发动机的频繁变速,一般允许存在少量偏差,所以,在汽车巡航控制方法的选取上,模糊PID完全适用.
[1] 纪光兰.汽车电子巡航控制系统[J].公路与汽运,2005(5):8-11.
[2] 刘波.现代汽车的电子巡航控制[J].汽车与配件,2007(34):34-36.
[3] 周洁,子荫.巡航控制系统及自适性巡航控制系统[J].汽车电器,2001(1):33-36.
[4] Huang Qiang,Bai Nan,Ji Zhen,et al.Simulation Support for Vehicle Control Systems Development[J].系统仿真学报,2006,18(8):2314-2318.
[5] Rajamani R,Zhu C.Semi-autonomous Adaptive Cruise Control Systems[J].IEEE Transactions on Vehicular Technology,2002,51(5):1186-1192.
[6] 王地川.汽车自适应巡航跟随模式研究[D].长沙:湖南大学,2003:1-4.
[7] 别秀梅,葛安林.机械式自动变速器车辆的模糊巡航控制[J].农业机械学报,2004,35(5):16-19.
[8] 胡克非.定速巡航系统的设计[D].武汉:武汉理工大学,2012:25-41.
[9] 喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2005:87-120.
[10]中国汽车技术研究中心标准化研究所.汽车标准汇编:2010[M].北京:中国标准出版社,2011:187-211.
[11]雷霞.PID参数整定方法的研究与应用[D].吉林:吉林大学,2003:20-48.
PID Control Method of Cruise Control System Based on Simulink
LI Ling, ZENG Jie
(Shenyang University of Chemical Technology, Shenyang 110142, China)
With the rapid development of automobile industry and the rapid growth of the number of highway,demands for safety and comfort in driving had been increasing.So more and more attentions were paid to the research of control method of cruise control system.First,the mathematical model of vehicle longitudinal motion was established.Then based on the Matlab Simulink toolbox,respectively by using conventional PID control and fuzzy PID control to study the model,the advantages and disadvantages of two different control methods were compared.The simulation results showed that the system had a quicker response speed in the fuzzy PID control and the control result was better.The conclusion provided the reference for the selection of control method for the cruise control system.
cruise control system; modeling; PID control; fuzzy PID control; simulation
2014-06-04
2013年沈阳化工大学校教改基金(2013C18)
李凌(1972-),女,山东梁山人,副教授,博士,主要从事复杂系统的先进控制方法研究.
2095-2198(2015)03-0273-06
10.3969/j.issn.2095-2198.2015.03.017
TP29
A
猜你喜欢
小学生学习指导(高年级)(2021年3期)2021-04-06
学生天地(2020年6期)2020-08-25
力学学报(2020年4期)2020-08-11
数学年刊A辑(中文版)(2020年2期)2020-07-25
黑龙江电力(2017年1期)2017-05-17
红土地(2016年7期)2016-02-27
系统医学(2016年8期)2016-02-20
中国卫生(2014年7期)2014-11-10
城市道桥与防洪(2013年8期)2013-03-11
电子工业专用设备(2011年8期)2011-03-23
