
基于多传感器的四旋翼飞行器硬件系统设计*
2015-03-26 07:59李运堂贾宇宁王鹏峰赵静一楼晓春
传感器与微系统 2015年2期
李运堂,贾宇宁,王鹏峰,赵静一,楼晓春
(1.中国计量学院 机电工程学院,浙江 杭州310018;2.杭州职业技术学院,浙江 杭州310018)
0 引 言
近年来,随着微电子技术、传感器技术、信号处理技术的迅速发展,以及新能源、新材料的广泛应用,使四旋翼无人飞行器的控制算法与工程应用得到了优化与创新。国防科技大学、上海交通大学等学者提出了基于Backstepping方法、自抗扰控制、滑膜技术的控制[1,2]。斯坦福大学的STARMAC 工程研发的四旋翼飞行器系统具有可靠完全自主航点跟踪的能力,具备多飞行器协同飞行水平[3]。麻省理工学院无人机集群健康管理计划实现了通过地面操作实现多个无人机对动态环境感知、重建并规划飞行[4]。
考虑到四旋翼飞行器具有非线性、多变量、强耦合等特点,要通过无刷电调控制4 个无刷电机的转速来实现由4 个输入量,6 个自由度的欠驱动系统的控制[5]。在四旋翼飞行器控制系统总体结构设计的过程中对飞行原理进行定性定量的分析,可以减少飞行实验平台的搭建时间,也可为电源模块、飞行控制模块的设计提供理论基础。为实现四旋翼飞行器的自稳控制,通过陀螺仪、大气压力传感器、三轴加速度传感器采集到的数据对飞行姿态进行解析,但是飞行时所产生的机体震动、温漂、零漂所带来的误差以及外界环境的干扰[6],使位置姿态的估计与飞行高度的保持产生了较大的困难。
对此,本文在飞行控制系统设计中对加速度传感器与陀螺仪融合使用,解析姿态数据的过程中使用卡尔曼滤波算法,不但有效地减弱了陀螺仪的温漂、零漂现象,还使得多传感器间的优缺点互补,提高了四旋翼飞行器的控制精度。
1 飞行原理与机械结构
四旋翼飞行器的旋翼对称地安装在呈十字交叉的支架顶端,位置相邻的旋翼旋转方向相反,同一对角线上的旋翼旋转方向相同,以此确保了飞行系统的扭矩平衡[7],如图1所示。四旋翼飞行器旋翼的旋转切角是固定值,因此,要通过调节每个电机的转速来实现六自由度的飞行姿态控制。增大或减少4 个电机的转速来完成垂直方向上的升降运动,调节1,3 旋翼的转速差来控制仰俯速率和进退运动,调节2,4 旋翼的转速差来控制横滚速率和倾飞运动,调节2 个顺时针旋转电机和2 个逆时针旋转电机的相对速率来控制偏航运动。

图1 四旋翼飞行器飞行原理图Fig 1 Flight principle diagram of quadrotor
通过对飞行原理的分析,把可行性、低成本、易维护作为主要考虑因素,设计的样机如图2 所示。机臂由镂空工程塑料材料PA66 和30%玻璃纤维制成,质量相对较轻,强度大,对称电机轴距55 cm,为保证水平起飞与平稳着陆,四旋翼飞行器底部安装起落架。电机旋翼等具体参数为:机体质量为857 g;最大负载约为300 g;机身高度为31 cm;飞行时间约为8 min。在整机安装过程中尽量保证重心在机械机构的对称中心,实际飞行实验证明了系统动力设备与机械结构的可行性。

图2 四旋翼飞行器样机Fig 2 Prototype of quadrotor
2 总体结构设计
四旋翼飞行器的硬件系统以飞控板为核心,搭载动力设备、电源模块与遥控模块。图3 描述了以ATMEGA644P—AU 为核心芯片搭载多传感器的飞行控制系统总体结构框图,整体系统利用11.1 V 锂电池供电,飞控与无刷电调以I2C 总线数据传输来调节4 个电机的转速;在遥控模块中,2.4 MHz 的控制信号通过PPM 解码板与飞控板进行数据传输;在多传感器系统中,大气压力感器用于飞行高度检测,陀螺仪与加速度计的融合使用用于姿态解算。
3 电源模块
四旋翼飞行器由2200 MAh,11.1 V,持续放电倍率30 C锂电池供电,通过稳压电路的设计对不同电路进行供电,确保各模块正常稳定的工作。控制系统需要5,3 V 两种电平供电,电压转换电路如图4 所示。
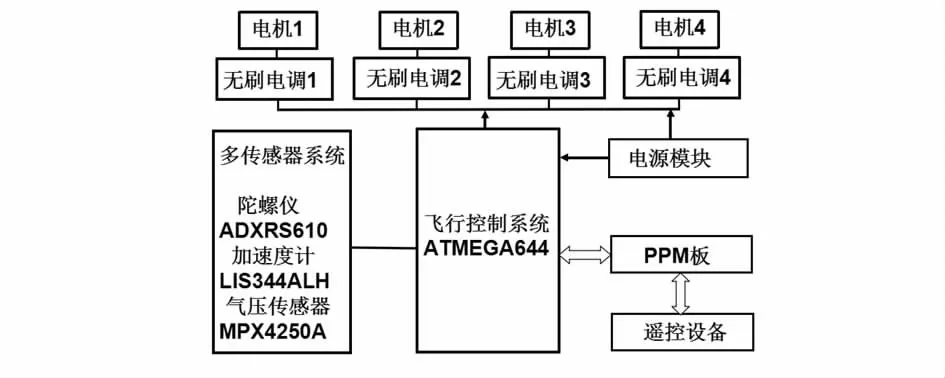
图3 飞行控制器总体结构框图Fig 3 Overall structure block diagram of flight controller
由锂电池提供的11.1 电压经两块7805 稳压芯片后转为5 V 电压,一部分用于飞控板供电,一部分向预留的外部接口供电。经7805 输出的5 V 电压经过2 个MCP1700T 稳压芯片输出3V 电压,一部分供给控制系统的数字电路,一部分供给控制系统的模拟电路。330 μF/25 V 电解电容器,10 nF/16 V 钽电容器,贴片电容器的并联使用起到了防止电压抖动与滤波的作用。
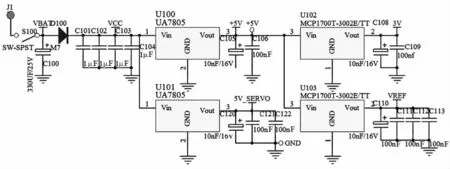
图4 电压转换电路Fig 4 Voltage conversion circuit
4 多传感器控制模块
为了准确地控制四旋翼飞行器的飞行姿态,需要在控制系统中加入不同的传感器,加速度传感器与三个陀螺仪来测量三轴加速度与角速度,大气压力传感器通过测量起始位置与飞行位置的气压差对飞行高度控制,为自主导航功能提供支持。
大气压力传感器选择的是 Freescale 公司的MPX4250A,在该集成传感器芯片上,除具有压阻式压力传感器外,还有用作温度补偿的薄膜电阻网络,测压范围为20~250 kPa,输出电压为0.2 ~4.9 V,工作温度范围为-40~+125 ℃。电路如图5 所示,可以根据压力的大小,通过控制P_1 和P_2 选择不同的放大倍数,提高采样的精度。

图5 大气压力传感器应用电路Fig 5 Applied circuit of barometric pressure sensor
LIS344ALH 是一种低功耗、高性能、高精度的三轴加速度传感器,通过模拟输出为外部电路提供直接测量信号,加速度传感器的工作电压为2.2~3.6 V,检测量程可以在±2 gn或±4 gn间选择。其中,VREF 为通过稳压芯片MCP1700T 转换为3 V 的稳定电压输入。应用电路如图6所示,选择100 nF 的贴片电容器作为VCC 端的解耦电容,在输出端使用1 μF 的滤波电容减小噪声。

图6 加速度传感器应用电路Fig 6 Applied circuit of acceleration sensor
考虑到振动误差无法通过加速度传感器进行补偿,因此,陀螺仪选型的过程中把机械性能作为重要的考虑因素,选择了可以在单芯片上实现完整单轴角速度响应的ADXRS610 陀螺仪传感器。3 个ADXRS610 陀螺仪分别安装于垂直于机体坐标系的XYZ 轴来实现系统三轴角速度的测量。应用电路如下图7 所示。

图7 陀螺仪应用电路Fig 7 Applied circuit of gyroscope
5 实验与仿真
四旋翼飞行器在姿态解算时,陀螺仪传感器直接测量的是角速度,在积分得到角度的过程中随着时间的增长会产生累计积分误差,积分误差产生的原因一方面是积分时间,另一方面,由于自身的机械特性会产生零漂温漂等现象[8]。在陀螺仪的使用过程中融合加速度传感器,不仅为陀螺仪提供了绝对参考系,而且使加速度传感器优秀的静态性能与陀螺仪良好的动态性能相结合[9],较好地抑制了外界干扰。数据经卡尔曼滤波算法处理后,可有效地降低数据噪声。
图8 为加速度传感器采样数据与卡尔曼滤波后的数据比较,可以明显地看到噪声信号减小了,但是仍有少量的扰动存在。
图9 的曲线表明了陀螺仪采集角速度数据存在零漂、温漂现象,当确定零漂为0.05°,静态输出电压为2.63V时,从波形图中可以观察到通过卡尔曼滤波处理后的积分数据平滑收敛,不但对零点漂移进行了补偿,而且对累计积分误差,温漂有较好的抑制作用。

图8 加速度计采样数据经卡尔曼滤波后的数据图Fig 8 Data diagram of sampling datas of accelerometer processed by Kalman filtering

图9 陀螺仪采样数据经卡尔曼滤波后的数据图Fig 9 Data diagram of sampling datas of gyroscope processed by Kalman filtering
6 结 论
本文从四旋翼飞行器的飞行原理入手,整合各个功能模块并通过对主要传感器的选型完成四旋翼飞行器控制系统的硬件电路设计,实现了飞行实验平台的搭建,多次飞行实验证明了硬件系统的可行性,达到了预期设计目标。在加速度传感器与陀螺仪的融合使用过程中,通过卡尔曼滤波算法对数据进行处理,有效地抑制了在硬件电路设计中无法避免的零漂、温漂等干扰因素,仿真结果证明了该方法的有效性。
[1] 王俊生,马宏绪,蔡文澜,等.基于ADRC 的小型四旋翼无人直升机控制方法研究[J].弹箭与制导学报,2008,28(3):31-34.
[2] 基 隆,张庆杰,朱华勇.微小型四旋翼无人机研究进展及关键技术浅析[J].电光与控制,2010(10):49-51.
[3] Hoffmann Gabe,Rajnarayan Dev Gorur,Waslander Steven L,et al.The standard testbed of autonomous rotorcraft for multiagent control(STARMAC)[C]∥Proceedings of the 23rd Digital Avionics Systems Conference,2004.
[4] Mario Valenti,Brett Bethke,Daniel Dale.The MIT indoor multivehicle flight testbed[C]∥IEEE International Conference on Robotics and Automation,2007:2758-2759.
[5] Salih A L,Moghavvemi M.Modelling and PID controller design for a quadrotor unmannedair vehicle[J].Automation Quality and Testing Robotics(AQTR),IEEE,2010,1:1-5.
[6] 百 慧,段军政,王红雨.基于薄膜磁阻传感器的微弱磁场测量仪的硬件设计[J].现代电子技术,2003(23):90-94.
[7] 杨庆华,宋召青,时 磊.四旋翼飞行器建模、控制与仿真[J].海军航空工程学院学报,2009,24(5):499-502.
[8] 徐东升.惯性导航中加速度计和陀螺仪性能研究[J].佳木斯大学学报:自然科学版,2012,30(3):334-337.
[9] Lotters J C,Schipper J,Veltink P H,et al.Procedure for in-use calibration of triaxial accelerometer in medical applications[J].Sensors and Actuators A,1998,68:221-228.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
电子制作(2019年23期)2019-02-23
百科探秘·航空航天(2017年9期)2017-12-31
北京航空航天大学学报(2017年9期)2017-12-18
山东工业技术(2016年15期)2016-12-01
北京航空航天大学学报(2016年8期)2016-11-16
系统工程与电子技术(2016年7期)2016-08-21
