
某型充饱和蒸气式温度传感器中焊接波纹管的设计思路及方法
2015-03-31 19:31申杰等
中国高新技术企业 2015年12期
申杰等
摘要:在发动机燃油调节系统、飞机防冰系统,充液(充气)式温度传感器都是重要的元件。充液(充气)式温度传感器通过内部充灌的感温介质感受温度变化后输出相应的位移,从而实现其调节功能或对其他元器件的控制。文章阐述了某型充饱和蒸气式温度传感器中焊接波纹管的设计思路及方法。
关键词:充饱和蒸气式温度传感器;焊接波纹管;设计思路;感温介质;弹性元件 文献标识码:A
中图分类号:TP212 文章编号:1009-2374(2015)12-0019-03 DOI:10.13535/j.cnki.11-4406/n.2015.12.010
充液(充气)式温度传感器是向产品内部充灌感温介质,当感温介质感受温度体积发生变化后,通过弹性元件输出相应位移。
充液式温度传感器感温介质在工作温度范围内不会发生相态变化,受介质本身体膨胀系数的限制,输出位移通常较小,如某型充液式温度传感器,在-20℃至50℃的温度变化范围内,位移仅有0.4mm左右。如需较大的位移,则必须有专用的感温介质存储端,必要时还要改变输出端的内部结构,如增加工艺凸台。图1中的充液式传感器就是一个大位移(2.7mm±0.3mm),且有输出端设有工艺凸台的产品。
充液式温度传感器除与充气式温度传感器一样有结构简单、工作可靠的优点,其工艺性要优于充气式温度传感器,主要是由于充气式温度传感器在充灌时感温介质为气态或气液共存状态,因此对整体充灌装置、温度传感器本身以及封口工艺的气密性要求较高。
充气式温度传感器在制造工艺流程上与充液式温度传感器基本相同,只是由于充灌介质的不同,又分为充气式温度传感器和充饱和蒸气式温度传感器。充气式温度传感器采用惰性气体作为感温介质,如氦气、氮气。充饱和蒸气式温度传感器则采用易挥发性的介质,如甲苯、乙醇等。此类温度传感器较充液式温度传感器测温范围广,当感温介质在工作温度范围内不发生相态转换时,其位移输出量与充液式温度传感器并无太大差异,但当感温介质在工作温度范围发生相态转换时,即发生气-液转换,在温度传感器同等体积的前提下,其位移量将成倍增长。
如图2所示的某型充饱和蒸气式温度传感器,采用的感温介质在工作温度范围会发生气-液两种相态的转换。该温度传感器体积与图1所示充液式温度传感器的输出端大小接近,但位移输出量达到了2mm±0.1mm。某型充饱和蒸气式温度传感器的位移输出端和感温介质存储端是一体的,这并不是此类传感器所特有的,充液式温度传感器同样也可以采用这种结构,具体采用何种结构主要决定于温度传感器安装结构和位移的需求。
在某型充饱和蒸气式温度传感器试制成功以前,此类温度传感器在国内航空机载设备中尚未见采用,也未有对其焊接波纹管设计思路及方法的系统阐述。
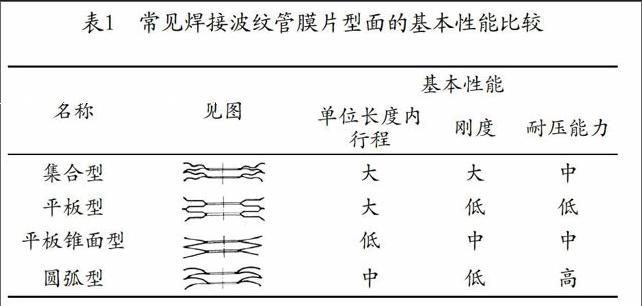
1 膜片波纹型面的选择
图2所示的充饱和蒸气式温度传感器的位移输出端(感温介质存储端)主要由焊接波纹管构成,而焊接波纹管则是通过焊接膜片的内、外圆后形成的一个气密腔体。表1向我们提供了不同的膜片波纹型面其刚度、耐压能力以及单位长度内行程的一个定性信息。从表1中我们可以看出,膜片的波纹型面对焊接波纹管的刚度、耐压能力以及单位长度内的行程都有着重要的影响,直接影响到充饱和蒸气式温度传感器的位移输出和可靠性。因此,在设计初期选择膜片波纹型面时要结合充饱和蒸气式温度传感器的输出位移要求、感温介质的充灌压力、工作温度范围等因素综合考虑,对膜片型面的选择方向做一个定性。以某型充饱和蒸气式温度传感器为例,其要求在-20℃至13℃产生2mm±0.1mm的位移,如果在体积相同的情况下,采用充液式温度传感器,在如此小的温度范围内是无法满足位移要求的。
根据需要,某型充饱和蒸气式温度传感器采用了可以在工作温度范围内发生气-液相态转换的感温介质氟利昂R410,在常温20℃充灌时,饱和蒸气压力可以达到约1.5MPa,因此我们选用耐压能力适中,但单位长度内行程较大的集合型膜片。
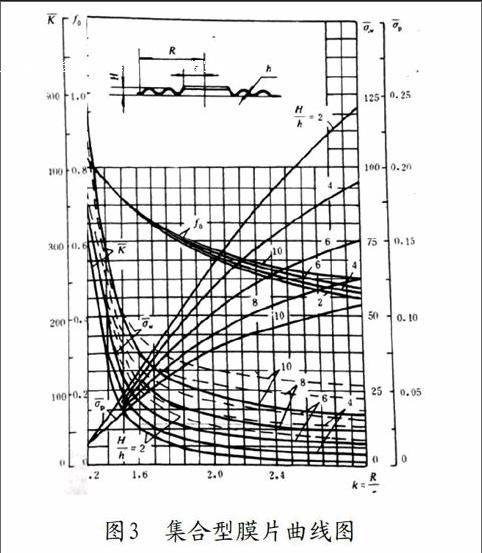
其中是需要通过查不同膜片型面的曲线图来确定。以某型充饱和蒸气式温度传感器的集合型膜片为例,当膜片波纹型面确定后,我们可以根据波纹管外半径R和波纹管内半径r的比值R/r,得到波深系数k的值,然后在集合型膜片曲线图(见图3)的横坐标上查到该值。再根据膜片高度H与厚度h的比值H/h,找到相应的值曲线,从该曲线与k值的交点沿横坐标平行画一条直线,与纵坐标的交点就是我们需要的值。
弹性模量E也需要根据不同的材料查阅资料获得,但膜片材料的选定一般是根据产品的使用环境(如温度、介质)或其他使用条件来确定。
其余变量h、n、R在下节感温介质工作压力与焊接波纹管刚度的匹配计算中进行讨论。
3 感温介质工作压力与焊接波纹管刚度的匹配方法及设计要点
当充饱和蒸气式温度传感器工作时,其充灌的感温介质在最高工作温度和最低工作温度时分别有一个压力值,这两个压力作用在焊接波纹管上,会得到两个集中力值,这两个集中力内的范围就是我们合理配置其他变量的范围。简而言之,感温介质工作压力与焊接波纹管刚度的匹配计算,其实就是一个力平衡的计算
3.1 部分变量的确定方法
其中f0仍需要借助膜片曲线图来确定,方法同值的确定方法类似,根据波纹管外半径R和波纹管内半径r的比值R/r,得到波深系数k的值,然后在膜片曲线图(见图3)的横坐标上查到该值。再根据膜片高度H与厚度h的比值H/h,找到相应的f0值曲线,沿该曲线与k值的交点与横坐标平行画一条直线,与纵坐标f0的交点就是我们需要的f0值。
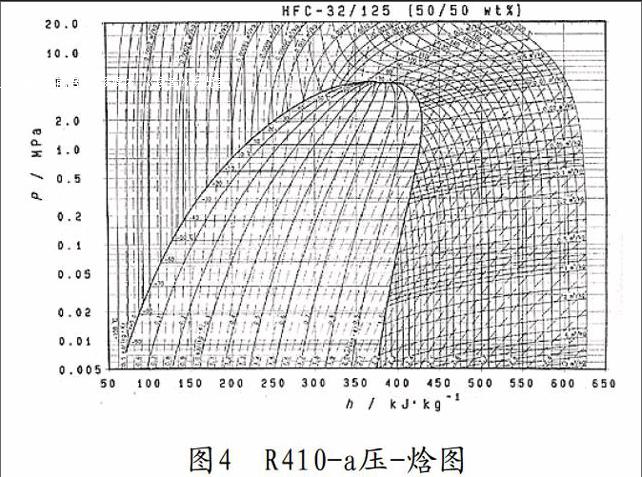
P0值则需要借助感温介质的压-焓图进行确定,压-焓图是以绝对压力为纵坐标,比焓值为横坐标的热力图,在图上可以查到该介质的不同状态的压力值、温度值、熵值、比焓值、比容值和干度值。但对本文所讨论的内容,我们只需看温度和压力的对应关系即可。
我们以某型充饱和蒸气式温度传感器所用的感温介质R410-a为例,其压-焓图如图4所示。在压-焓图上,我们先找到某型充饱和蒸气式温度传感器最高工作温度13℃和最低工作温度-20℃这两个温度点,从这两个温度点沿横坐标分别画一条横线,与纵坐标压力的交点就是该感温介质在这两个温度下的饱和蒸气压力,这时我们可以看出在这两个温度下感温介质R410-a对应的饱和蒸气压力分别约为1.2MPa和0.6MPa。
在得到这两个温度下感温介质R410对应的饱和蒸气压力值后,从式(2)中我们可以看出,变量只剩下波纹管外半径R,波纹管内半径r,膜片高度H,膜片厚度h和膜片数n。
波纹管外半径R通常意义下与用户的使用要求有关,如安装尺寸,因此用户一般会给定一个值或一个范围,这样我们就得到一个R的定值或在范围内选定一
个值。
当R值确定以后,我们就可以通过式(2)确定出该某型充饱和蒸气式温度传感器在最高工作温度13℃和最低工作温度-20℃时所能产生的集中力范围。
在这个范围内我们可以对剩余的变量r、h、n、H进行合理的配置,方法与充液式温度传感器类似,主要是配置过程中考虑加工的工艺性和经济性。如厚度h,其值越小,刚度K值则越小,但我们不能为了寻求小的刚度值,而不断降低厚度h的值,这样会大大增加冷轧工艺上的难度,同时由于冷轧次数的增加,成本也会大幅攀升。
3.2 设计要点
当充饱和蒸气式温度传感器充灌的感温介质在常温下是高压的气体或气液共存体时,就会存在极高的泄漏风险。
仍以某型充饱和蒸气式温度传感器为例,最初设计采用0.07mm厚度膜片,目的在于保证焊接波纹管刚度的同时,减少焊接工序。但常温下该感温介质充灌压力为1.4MPa,充灌完毕后,当天测试该温度传感器性能良好,满足产品的性能要求。经过一周的存放,再次测试时发现该充饱和蒸气式温度传感器的总位移已经下降至原测试数据的70%,说明充饱和蒸气式温度传感器已经发生了泄漏。后经理化分析,膜片材料最终状态的平均晶粒度为30μm,也就是说在单个膜片厚度上只有约2个晶粒,在高压条件下,致使感温介质沿晶间泄漏。后将膜片厚度加至0.1mm,单个膜片厚度约有3个晶粒,经存放后证明,此时的泄漏率可以满足该充饱和蒸气式温度传感器的使用要求。
因此建议在确定变量膜片厚度h时,应保证膜片厚度h大于等于3个该膜片材料最终状态的平均晶粒度之和,这样可以保证充饱和蒸气式温度传感器在使用年限内,泄漏率保持在合理可靠的范围。
4 结语
第一,本文阐述了某型充饱和蒸气式温度传感器中焊接波纹管的设计思路与方法,主要不同于充液式温度传感器(常压充灌)的方面有:(1)膜片型面选择要结合位移输出量、工作温度范围和感温介质充灌压力,综合考虑膜片的刚度、耐压性和单位长度内的行程;(2)通过感温介质压-焓图确定最高工作温度和最低工作温度时的压力范围,在此压力范围内合理配置其他变量;(3)膜片厚度的选定要考虑防止感温介质在高压气态下沿晶间泄漏。
第二,本文所阐述的某型充饱和蒸气式温度传感器中焊接波纹管的设计思路与方法,部分参数是基于理想化的参数,与实际参数会有一定出入,因此计算结果不能完全与测试结果一致。该设计思路与方法可以最大限度缩小与实际要求的距离,在实际试验过程仍需要进行微量调整方可满足充饱和蒸气式温度传感器的性能
要求。
参考文献
[1] 金慧根.航空制造手册/弹性元件工艺[M].北京:航空工业出版社,1994.
[2] 朱颖.制冷工艺设计[M].北京:机械工业出版社,2013.
作者简介:申杰(1978-),男,山西原平人,太原航空仪表有限公司敏感元件研究所工程师,研究方向:弹性敏感元件设计;毛慧卿(1987-),女,山西五台人,太原航空仪表有限公司敏感元件研究所工程师,研究方向:弹性敏感元件
工艺。
(责任编辑:周 琼)
猜你喜欢
水电站机电技术(2023年11期)2023-11-29
中小企业管理与科技(2019年23期)2019-09-21
河北农机(2017年4期)2017-02-26
商情(2016年43期)2016-12-23
新教育时代·教师版(2016年30期)2016-12-05
橡胶工业(2015年11期)2015-08-01
上海计量测试(2014年4期)2014-04-26
制造业自动化(2011年23期)2011-04-10
