
一种铁镍合金磁致伸缩位移传感器设计*
2015-04-01 12:19鲍丙豪曹一涵
传感器与微系统 2015年12期
孔 宁,王 娟,鲍丙豪,曹一涵
(江苏大学 机械工程学院,江苏 镇江212013)
0 引 言
磁致伸缩位移传感器是利用力磁耦合产生的磁弹性波在磁伸波导丝中传播延时效应来实现位移测量。该传感器具有测量精度高、测量范围大、重复性好、稳定性高、非接触测量以及适用于恶劣环境等优点[1],已被美欧等发达国家广泛地应用于石油、化工和机械制造等领域。美国MTS 公司开发的量程为2 000 mm 的R 系列位移传感器,分辨力高达2 μm,线性度达±0.01%,平均无故障时间高达20 年[2],我国在磁致伸缩位移传感器研究方面虽与西方国家还有较大差距,但也正在积极探索,并取得一定成就[3]。
本文阐述了力磁耦合扭转应力波的产生和感应线圈检测磁弹性波产生电信号机理,优化了磁致伸缩位移传感器的激励信号参数和检测信号脉宽调制(PWM)处理电路,所得传感器信号更易处理和控制,实现待测量D/A 显示,并对优化后传感器性能进行相关分析。
1 磁致伸缩位移传感器的相关理论
1.1 力磁耦合扭转应力波产生分析
磁致伸缩材料具有优异的电磁性能,当其同时受到纵向磁场和轴向环形磁场共同作用时,磁畴排列发生改变,在宏观上表现为材料的扭转[4],图1 是单个磁畴受到磁场作用时的取向变化分析。
此处不考虑温度变化影响,则磁畴的自由能仅由自身内应力和外界磁场决定[5]。图1(a)所示为磁伸材料未施加激励电流时,环形磁场Hp=0,此时磁畴仅受到内应力和永久磁体产生的轴向磁场He作用,M1为磁畴平衡时取向。图1(b)是磁伸材料施加周期性瞬时激励电流Ip时,根据右手定则,在波导丝周围产生周期性的瞬时环形磁场Hp,其与轴向磁场He耦合叠加并共同作用于磁畴,M2为此时磁畴平衡时取向,使磁畴取向在空间上偏转一定角度,磁畴的偏转引起材料宏观上扭转变形,使待侧位置处形成振动源,即产生力磁耦合扭转应力波,实现电磁能转换为机械能。

图1 内应力、偏置磁场及脉冲磁场引起磁畴取向变化Fig 1 Change of internal stress,bias magnetic field and pulse magnetic field cause magnetic domain orientation
1.2 感应线圈检测磁弹性波产生电信号机理
力磁耦合扭转应力波的检测方法是采用磁致伸缩逆效应实现[6],当待测位置处产生磁弹性波后,形成的振动源沿磁伸材料以声速v 向两端传播,传向末端所引起的振动经阻尼装置吸收,根据逆磁致伸缩效应,传向前端的振动会产生扭转式冲击波,致使检测线圈处磁伸材料内部磁畴变化,进而引起其周围磁场改变。
图2 所示为弹性波拾取装置,线圈直接缠绕到波导丝的一端,偏置磁铁用于整形检测线圈感应的激励脉冲信号。当磁伸材料周围磁场变化时,反映待测位置处磁感应强度B、感生磁场强度M 和介质磁场强度H 之间关系

式中 μ0为真空磁导率。根据法拉第电磁感应定律,检测线圈两端产生感应电动势E,实现机械能转换为电磁能,其大小如式(7)所示[8]

式中 N 为检测线圈匝数,S 为线圈等效横截面积,m2。
2 磁致伸缩位移传感器测量原理

图2 弹性波信号拾取装置Fig 2 Device of elastic wave signal pickup
图3 是传感器的工作原理示意图,当激励信号模块产生的脉冲电流Ip施加于磁伸材料波导丝时,脉冲沿磁伸材料向前传播,根据电磁理论,其周围产生周向环形磁场Φa,该磁场与游标磁环产生的纵向磁场Φb耦合得到瞬间扭转磁场Φc,由于磁致伸缩效应,导致合成磁场处的磁致伸缩线内部磁畴发生瞬间形变,在波导丝表面形成力磁耦合磁弹性波,并沿轴向以声速v 向波导丝两端传播,传向末端的磁弹性波被阻尼器件吸收,传向激励端的信号则被检波装置接收[9]。
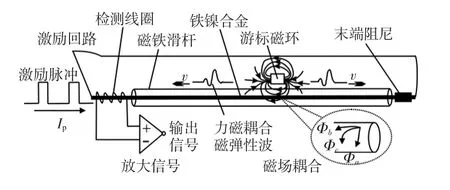
图3 磁致伸缩位移传感器工作原理示意图Fig 3 Diagram of magnetostrictive displacement sensor working principle
感应线圈感应产生的输出信号通过检测信号调理电路,得到正比于测量位移的PWM 信号。图4 是时间差测量示意图,设磁弹性波的传播速度为v,通过计算磁弹性波从发生位置至测量基点间的时间t 得出待测位移量,故磁铁至感应线圈间的距离为[10]


图4 时间差测量示意图Fig 4 Diagram of time difference measurement
3 传感器电路系统设计
图5 是磁致伸缩位移传感器电路结构框图,主要由激励信号产生电路、检测信号处理电路和D/A 显示部分组成。
3.1 激励信号发生电路设计

图5 磁致伸缩传感器电路结构框图Fig 5 Structure block diagram of magnetostrictive sensor circuit
激励信号发生电路主要包括脉冲信号发生电路、单稳态触发电路和脉冲功率放大电路组成。本实验选用的铁镍合金材料直径0.75 mm、长度92 cm,分析铁镍合金材料本身性能和相关理论,实验选用NE555 组成的多谐振荡器产生周期为1.5 ms 的矩形波信号。为了方便后续电路脉宽可调,需给铁镍合金施加6 ~12 μs 的窄脉冲,本实验选用10 μs 的窄脉冲信号,如图6 中a 曲线所示。

图6 单稳态和功放电路输出波形Fig 6 Output waveforms of monostable and power amplifier circuits
由于单稳态电路输出的窄脉冲信号带负载能力弱,不足以直接驱动波导丝产生磁弹性波。本文实验设计了由TDA1514 构成的窄脉冲功率驱动放大电路,图6 中a 曲线所示为脉冲功率放大信号,从图中可知,输出的窄脉冲信号幅值达10.3 V,实验所用铁镍合金直流电阻器为2.43 Ω,将激励脉冲信号加载到波导丝材料,其脉冲电流幅值高达4.24 A,满足实验激励要求。
3.2 传感器输出信号电路设计
由于检测线圈的感应信号十分微弱,仅有几毫伏,且频率较高,还有杂波干扰,故必须将其进行滤波、放大等处理,图7 中a 曲线是感应信号滤波放大波形图,图中前两个信号分别为感应到的激励信号和磁弹性波信号,第三个信号是由磁弹性波信号传至传感器末端反射而形成的,故通过电压滞回比较电路得到三个脉冲信号(图7 中b 曲线所示)。

图7 感应信号放大、电压比较、PWM 电路信号输出波形Fig 7 Output waveforms of inductive signal amplification,voltage comparison and PWM circuits
考虑到末端反射波脉冲信号对后续时间测量的影响,设计了PWM 电路(图8 所示),采用CD4013 构成D 触发器,通过捕捉参考脉冲信号和比较电路的磁弹性波信号的脉冲上升沿而产生PWM 信号(图7 中c 曲线所示),为了使参考脉冲信号与感应信号相位一致,本实验选用单稳态触发信号作为参考脉冲信号,且需调节合适的脉宽,使其大于感应信号激励波的脉宽,这样通过硬件电路有效地消除了末端反射波造成的影响,提高信号质量,触发信号的响应快,方便后续处理。

图8 电压比较与PWM 电路图Fig 8 Voltage comparison and PWM circuit
4 传感器性能测试与分析
在实验环境下对传感器性能进行测试,本实验选用92 cm铁镍合金材料实验,去除传感器检测线圈端和末端测量盲区,该传感器有效测量量程84 cm,滑动磁铁组件,每隔3 cm 记录一组数据,同时,记录模拟式电压值和数字式时间示数,测得数据分别通过Matlab 软件最小二乘法进行数据拟合,图9 和图10 分别为数字式和模拟式最小二乘法拟合曲线,通过数字式和模拟式拟合曲线可以看出:实验测得数据均匀地分布在拟合直线上,且在该传感量程范围内拟合线性度高。
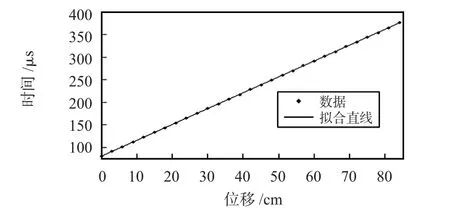
图9 数字式最小二乘法拟合直线Fig 9 Fitting straight line of digital least square method
数字式最小二乘法拟合曲线关系为

式中 T 为返回脉冲与激励脉冲之间的时间差,μs;s 为活动永久磁铁的实际位移,cm。
可计算出数字式传感器的线性度为


图10 模拟式最小二乘法拟合直线Fig 10 Fitting straight line of analog least square method
式中 Δsmax为测量点中的最大偏差,YFS为测量值的满量程输出。
模拟式最小二乘法拟合曲线关系为

式中 U 为活动磁铁实际位移所对应的电压值,V;s 为活动永久磁铁的实际位移,cm。
可计算出模拟式传感器的线性度为

5 结束语
本文设计了一种数字/模拟式铁镍合金磁致伸缩位移传感器,研究并分析力磁耦合扭转应力波产生和感应线圈检测磁弹性波产生电信号机理,在PWM 电路设计中,通过触发电路很好地消除了波导丝末端反射波信号。根据传感器相应参数标定实验,当激励脉冲信号脉宽为10 μs,激励功放幅值达10.3 V,检测线圈匝数为600 匝时,该传感器的激励脉冲信号驱动铁镍合金波导丝效果理想,两种反映铁镍合金磁致伸缩位移传感器测量线性度的输出方式线性度相当,基本能够满足设计的整体要求,该传感器系统设计成本低,结构简单,为后续基于磁致伸缩效应的相关位移传感器的开发研制奠定了基础。
[1] 冯希辰,周新志,余 波.磁致伸缩位移传感器回拨信号滤波器设计[J].传感器与微系统,2013,32(6):104-106.
[2] Carvalho H R,Bruno A C,Braga A M,et al.Remote magnetostrictive linear position sensors interrogated by fiber Bragg gratings[J].Sensors and Actuators A,2007,135:141-145.
[3] 李丛珊,蒋印平.一种磁致伸缩位移传感器的优化设计方法[J].传感技术学报,2014,27(9):1202-1207.
[4] 冯 健,赵 辉,刘伟文.磁致伸缩位移传感器电路系统的设计[J].电子测量技术,2010,33(1):11-13,28.
[5] 夏 天,高学绪,李纪恒,等.铁镍合金丝威德曼效应测量与磁畴结构[J].磁性材料及器件,2008,39(2):21-25.
[6] 王智强,彭勇刚,韦 巍.磁致伸缩位移传感器在精密注塑机上的应用[J].传感器与微系统,2010,29(9):138-144.
[7] 王 峥,常晓明,脇若弘之.长线磁致伸缩位移传感器的磁极化强度模型[J].传感技术学报,2010,23(8):1075-1078.
[8] Seco F,Martin J M,Jimenez A R.Improving the accuracy of magnetostrictive position sensors[J].IEEE Transactions on Instrumentation and Measurement,2009,58(3):722-729.
[9] 杨雅洁,周 丽.基于磁致伸缩效应的超声应力波传感器设计与优化[J].仪器仪表学报,2010,31(11):2474-2480.
[10]Kim Y G,Moon H S,Park K J,et al.Generating and detecting torsional guided waves using magnetostrictive sensors of crossed coils[J].Independent Nondestructive Testing and Evaluation,2011,44(2):145-151.
猜你喜欢
大电机技术(2022年4期)2022-08-30
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
河北省科学院学报(2020年1期)2020-05-25
装备制造技术(2020年12期)2020-05-22
模具制造(2019年7期)2019-09-25
中学生数理化·高二版(2016年12期)2017-02-28
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
Coco薇(2016年1期)2016-01-11
