
基于光栅式双目技术的3D照相技术研究
2015-04-10 03:43吴献辉陈绪兵胡泰然
武汉工程大学学报 2015年11期
吴献辉,陈绪兵*,胡泰然
1.武汉工程大学机电工程学院,湖北 武汉 430205;2.化工装备强化与本质安全湖北省重点实验室(武汉工程大学),湖北 武汉 430205
基于光栅式双目技术的3D照相技术研究
吴献辉1,2,陈绪兵1,2*,胡泰然1,2
1.武汉工程大学机电工程学院,湖北 武汉 430205;2.化工装备强化与本质安全湖北省重点实验室(武汉工程大学),湖北 武汉 430205
发型是人体的典型特征,但是由于发丝颜色比较深、细且松散,通过光学测量很难获取三维信息,这给三维人像模型的扫描建模带来了一定的困难.通过建立发型模板库,将扫描数据与发型数据拼合,可以得到完整的人像模型,再使用熔融沉积成形技术进行3D打印,可以得到塑料3D人像.实验制作了丙烯腈-丁二烯-苯乙烯塑料80.29 mm×92.54 mm×63.01 mm的半身人像以及人脸,其人脸的平均偏差范围较小(-0.170 mm,0.134 mm),整体偏差稳定,表明这种方法切实可行,能够制作出外观良好、精度较高的3D人像.
光栅测量技术;人偶打印;3D测量;发型库
0 引言
随着技术的进步、大众消费理念的变化,3D人像打印渐渐走进人们的生活.与传统“泥人张”手工人像相比,3D人像打印制作过程简单、周期短、精度高.3D人像打印主要包括人像建模和人像打印两个部分.
目前,根据输入数据不同,人像建模的主要方法有两种.第一,通过输入图像重构三维模型[1-2],如利用统计学的单张图片重构法、利用特征点匹配的多张图片重构法.其输入一般为二维图像,如照片、视频等.此类技术运用计算机图形学、计算机几何、人体几何特征、数学计算、统计学数据等知识来实现.相应的软件如,facegen、candide、agisoft等,用于对精度要求不高的情况.第二,利用三维扫描仪扫描人体,直接获取人体的三维点云数据.使用的仪器如面结构光扫描仪、光栅扫描仪、红外扫描仪、CT扫描仪等[3].该方法可以较为准确逼真的得到人体模型.
3D打印技术于1995年在美国麻省理工学院诞生[4].3D打印技术种类众多,例如,选择性激光熔化成型、石膏3D打印、分层实体制造、熔融沉积技术、光固化成型技术.目前,使用最多,运用最广的就是熔融沉积技术.
采用双目光栅测量系统.利用逆向工程软件Geomagic studio 12,进行数据拼接,得到人体模型.利用3Dmax软件建立发型库.将人体数据与发型数据进行拼接、修补、封装等处理,获得完整的三维人像模型.
1 基于光栅测量的人像建模
人体存在大约2 Hz的自然频率,即人的表情和身体会发生微小抖动,影响三维模型质量.为提高采集数据的精确性、完整性,需要减少拍摄时间和次数.光栅测量为结构光投射方式的多线模式,能够一次获得较多数据,满足要求.
光栅投影到人体经过调制得到变形光栅,两个摄像机从正面、左右两个侧面背面等位置采集变形光栅,将数据导入计算机进行计算,最终得到相应面人体特征点数据.利用软件Geomagic studio 12,将数据进行拼接,得到人体模型.利用3Dmax软件建立由于光照原因无法测量的发型库数据.将人体与发型数据进行拼接、修补以及封装,最终获得完整的三维人像模型.具体流程如图1所示.
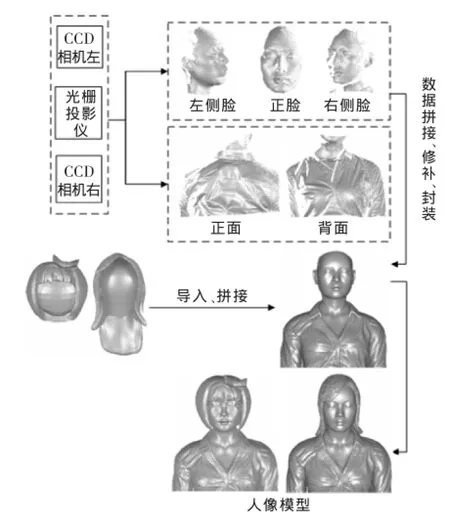
图1 三维人像模型建模流程Fig.1 Process of 3D portrait modeling
2 光栅式双目扫描计算原理
采用的扫描系统由两个CCD摄像机和一个光栅投影仪组成.其基本原理为,首先通过测量系统标定,得到光栅式双目系统参数,即摄像机内外参数以及其光栅投影之间几何位置关系.然后向被测物体表面投射一组光栅图像,光栅经调制变形,两照相机同时拍摄变形光栅图像.采用一定的算法求取变形光栅的相位分布,得到绝对相位,完成两幅图像点的匹配;最后根据双目视觉原理,解算出被测物体的三维点云坐标.
2.1 光栅相位计算
对光栅图像主值相位求解采用四部相位法,将光栅在垂直栅线条方向上平移1/4个栅距,四副标准相位光栅图像的初始相位分别为0、π/2、π、3π/2,其光强表达式如下:
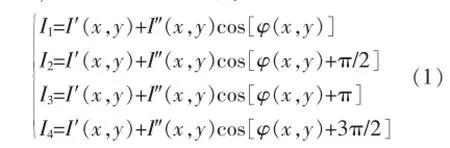
Ii(x,y)为图像坐标点(x,y)的光强,I′(x,y)为图像平均灰度值,I″(x,y)为图像灰度调制幅值,φ(x,y)为待求的主值相位,即相对相位.
根据式(1)可以得到:

根据式(2)求出像素点对应相位值φ(x,y),相位主值在[-π,π]之间,由于正弦光栅图像的周期性,主值相位在测量中并不是唯一,需要相位展开,得到绝对相位φm,如图2所示.
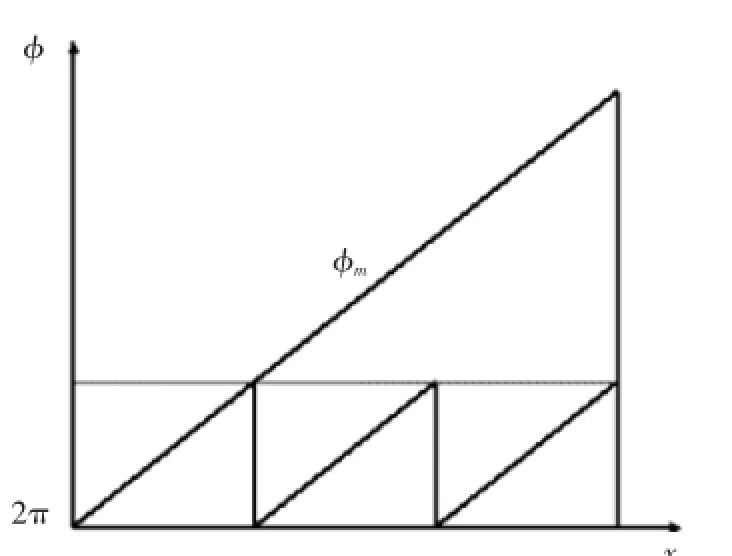
图2 绝对相位与相对相位Fig.2 Absolute phase and relative phase
采用Reich三频两步外差法[5]进行相位展开.使用三个初始值相位函数分别为φ1、φ2、φ3,其频率分别为f1、f2、f3,则由多频外差法可以得到.
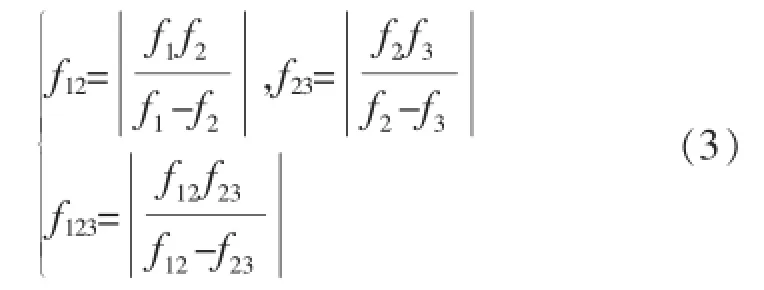
式(3)中,f12为φ1、φ2两函数叠加函数φ12的频率,f23为φ2、φ3两函数叠加函数φ23的频率,f123为φ12、φ23两函数叠加函数的频率.选择适当时f1、f2、f3,可使叠加频率f123为1,从而图像像素点相位在整个区域无歧义展开,得到φ(x,y).
2.2 双目视觉原理的立体匹配和三维重构
如图3所示,I1、I2为左右摄像机获取的图像平面,P为空间物点,P1、P2为左右图像上像点.

图3 光栅双目视觉原理图Fig.3 Schematic diagram of raster binocular vision
由光栅相位计算原理,根据左图像I1上的点P1的相位值,可在右边图像I2上找到一条与点P1具有相同相位值的变形灰度条纹.由极线原理,可找到P1在右图像对应的极线Ep.匹配点在条纹曲线和极线上,两者交于点P2,即P2为I2图像上P1对应匹配点.
摄像机投影方程如公式(4).
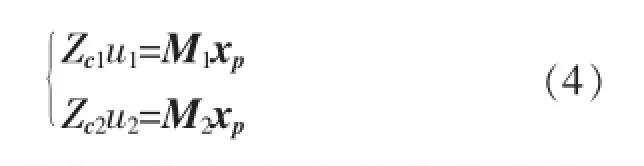
u1、u2分别为相机图像上P1、P2的像素坐标,Zc1、Zc2为比例因子,为常量.M1、M2为左右相机的投影矩阵,由摄像机标定得到.xp为空间点P三维坐标.根据式(4)能够求出物点三维坐标.
3 发型库及数据拼接
3.1 发型库
发型是人体的显著特征,但是由于发丝颜色比较深、细且松散,通过光学测量很难获取其三维信息.目前,只有红外扫描仪能够扫描到部分头发.使用其他扫描仪情况下,通过带假发或者使用理发产品将头发整理成面状的发型,采集部分被头发覆盖的头部数据.使用间接法创建人物发型,如,后期用Maya、3Dmax、Z-brush等软件构造一组发型,建立一个发型库,得到人体模型后,根据其头型和顾客的喜好,选择适合的头发进行匹配,即为发型移植法[5],流程如图4所示;将人体模型直接导入3Dmax等环境,利用手绘板等工具重建头发,该操作需要一定的美术基础,操作不易实现.
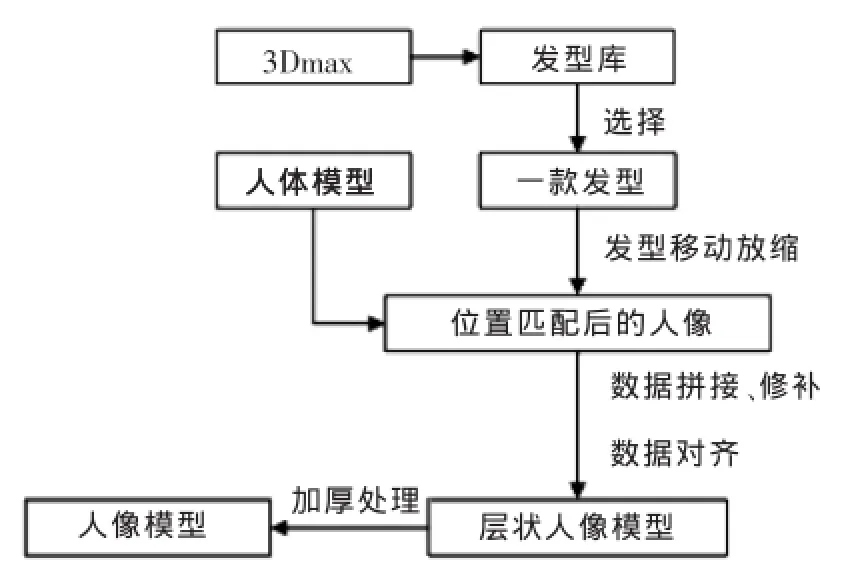
图4 发型移植流程Fig.4 Process of hair transplant
通过发型移植的方法创建人物发型,使用3Dmax建立发型库.其中四款发型如图5所示.

图5 发型图Fig.5 Hairstyle template library
3.2 数据拼接
三维扫描得到人体脸和身体不同面点云数据,需要进行拼接、封装处理得到人体模型.人体建模完成之后与发型拼接、并完成后期数据处理获得人像模型.
光栅扫描系统获得的人脸三维点云存在少量噪声、冗余等数据,为保证数据完整性精度,一般在点云阶段,只对孤点数据进行删除处理.数据拼接采用手动加自动拼接的方式.手动选取两组点云位置相似的点(点的数目大于3),如图6所示.

图6 左侧脸与正脸拼接Fig.6 Merge of left and face data
在第一次测量点云集合为P坐标分别为(xi,yi,zi),第二次测量点云集合为Q,坐标为(Xi,Yi,Zi).点1、2、3为手动选取的点,坐标为式(5).通过以下计算得到相应的变换矩阵T.
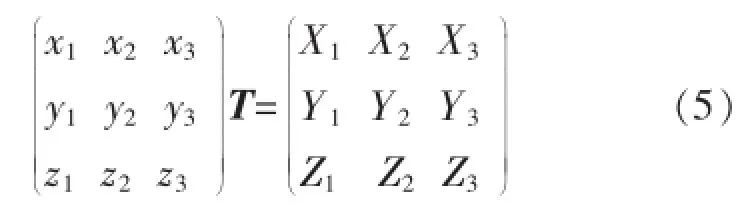
而对齐过程中,手动选点存在误差,为了减少误差,可以选取多个点(i>3).计算得到多个变换矩阵,使用最小二乘法对点云处理,测量误差,选取误差值最小时的变换矩阵对点云进行拼接.

得到最佳变换矩阵后,再通过式(6)完成所有点云拼接.再进行自动拼接,进一步对齐点云.
首先,测量中,人脸两鬓、耳蜗等部位数据,会受到头发和阴影的遮挡,可能无法完全测量,出现数据缺损的情况,需要对缺损的数据进行修补.其次,扫描数据与发型数据拼合时,为了匹配扫描人像模型.需通过齐次坐标变换对导入的发型数据进行比例缩放以及平移处理.再次,通过特征点对齐技术,将发型点云数据与人像点云数据拼齐.最后,对拼齐的点云进行封装、简化、降噪等操作,得到面片STL模型如图7所示.
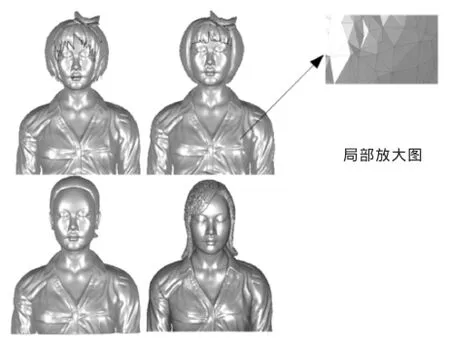
图7 人体模型图Fig.7 Human body model
4 实验
4.1 3D人像打印
实验设备为武汉维景三维科技有限公司的PowerScan-Ⅱ精密型光栅扫描仪、北京太尔S200系列3D打印机.参数如表1所示.
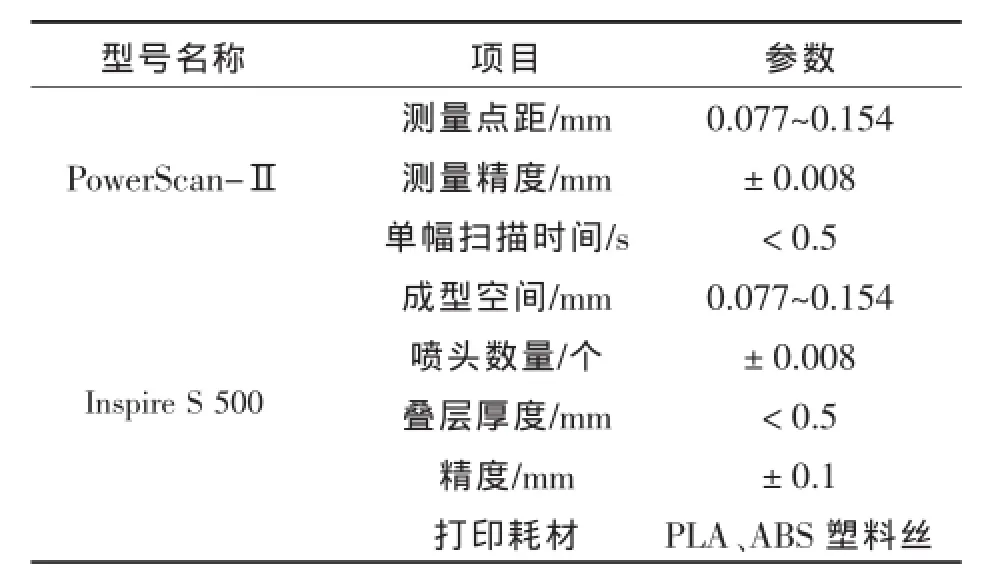
表1 扫描仪、打印机参数测量参数Table 1 Parameters of scanner and printer
通过图1流程,制作一个完整人像.其中,将扫描得到的数据和发型数据导入Geomagic Studio软件进行点云拼接得到人像模型具体点云数据如表2所示.自动拼接过程中,调整公差为0.01 mm.导入适当的发型库数据,进行数据插补与融合,得到完整的人像点云.点云封装面片三角化,导出为STL格式.经过打印机加工,材料为ABS塑料丝,得到塑料人像模型,喷漆处理后如图8所示.
由于打印机范围有限,打印模型缩放0.2.原尺寸为252.09×418.28×587.35 mm,缩放后为50.34× 83.66×117.47 mm.花费材料102 g.
4.2 人脸测量
光栅扫描人体得到一次扫描数据,处理打印,将塑料人像再次使用光栅扫描,得到二次扫描数据.将二次扫描数据与一次扫描数据进行拟合比较,测量人像模型打印精度.为了方便检测,减小检测误差,另一做组人脸实验,如图9所示.
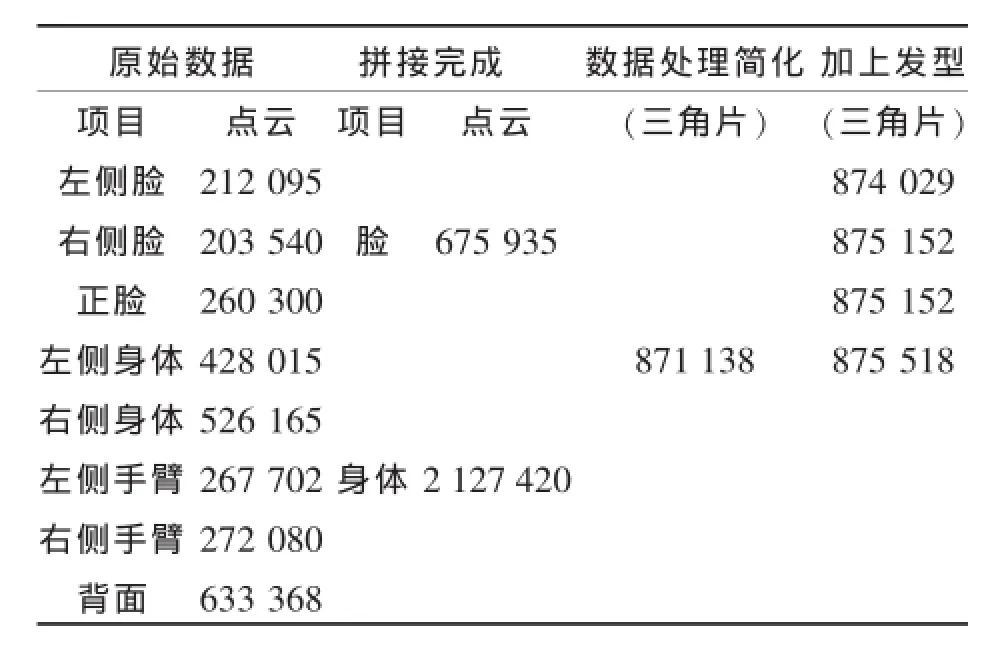
表2 人像拼接数据Table 2 Merging data of portrait
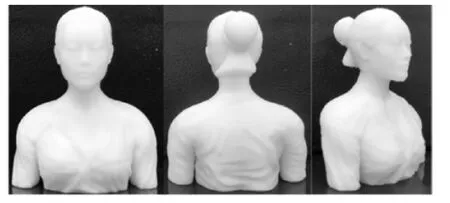
图8 3D塑料人像Fig.8 Portrait of 3D plastic
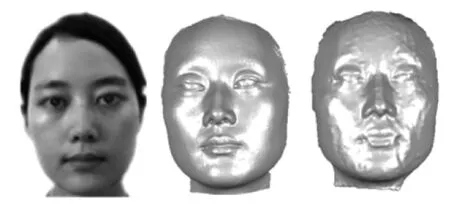
图9 人脸照片(左),一次、二次人脸扫描数据Fig.9 Face image(left),the original(middle)plastic and(right)face scan data
Geomagic Studio中的“最佳拟合对齐”功能可以实现模型拟合比较.对两组脸型数据进行拟合分析,一次扫描数据为参照,二次扫描数据为测量数据,如图10所示,其偏差如表3所示.
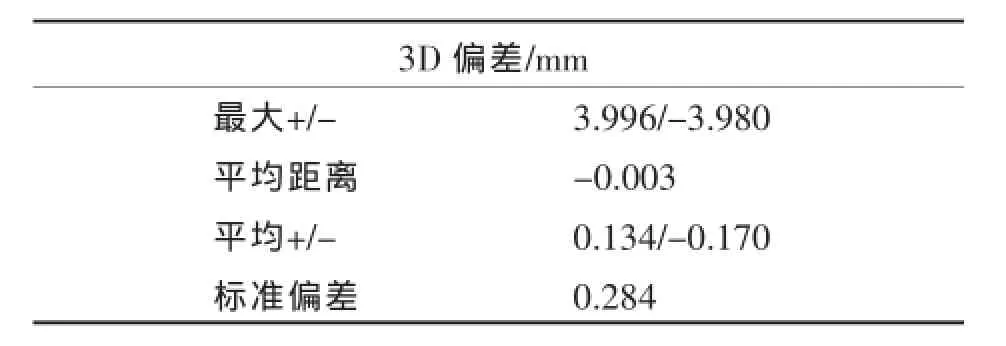
表3 偏差数据Table 3 Data of deviation
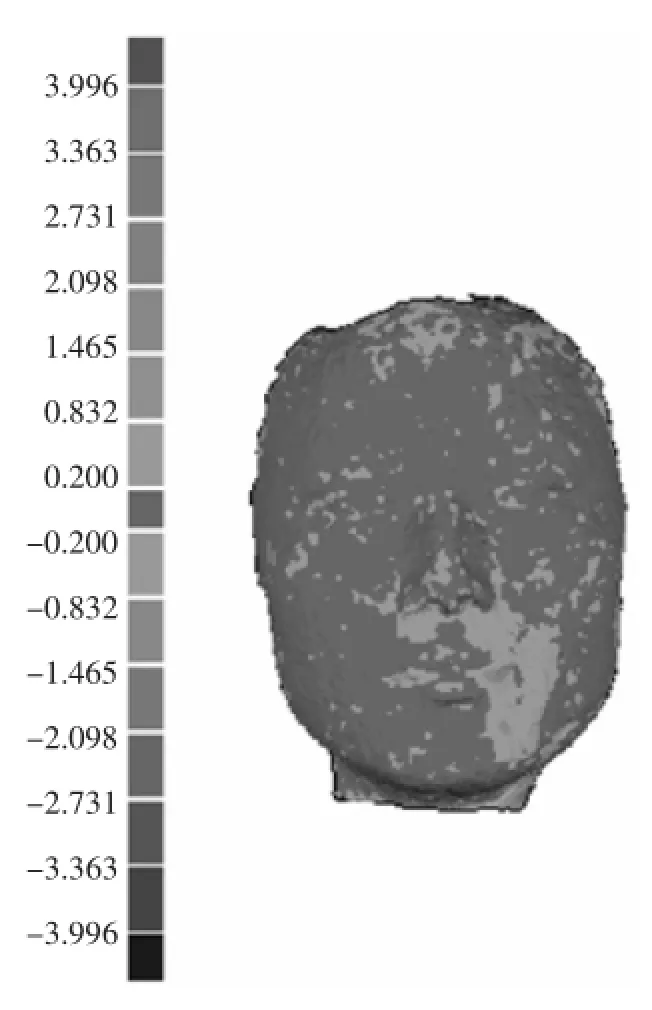
图10 偏差测量Fig.1 0Deviation measurement
3D光栅分别扫描人体与塑料人像,得到其平均偏差为0.134~-0.170 mm,平均偏差值较小.说明平均拟合精度高.可依据此拟合分析,而且小偏差范围(0~0.200 mm)分布面积大,占大半脸,说明整体偏差较为稳定.综合测量仪精度±0.008 mm,打印机精度±0.1 mm,偏差范围合理.说明这种测量方法具有良好的精度.
5 结语
使用双目光栅测量技术、FDM技术制作3D人像.双目结构光系统获得人体数据,提高精度,减少误差.对于无法测量的发型数据,建立发型库模板,经过数据的拼合、减噪、简化,得到模型即一次扫描数据.最后3D打印,得到实体模型.实体模型再扫描,与一次扫描数据拟合,得知该模型具有高的精度.
该发型移植的方法,可以省略3D测量中头发型难得的过程,可用于其他的3D测量系统,扩大了人偶测量的仪器种类.实验中,得到的塑料人像数据表面较为粗糙,改进实验可对塑料人像喷漆处理,进一步提高人偶美观度.
[1]OLIVEIRA Santos,BAUMBERGER T.3D face reconstruction from 2D pictures:First results of a web-based computer aided system for aesthetic procedures[J].Annals of Biomedical Engineering:The Journal of the Biomedical Engineering Society,2013,41(5):952-966.
[2]易法令,熊伟.人脸自适应三维建模的研究与实现[J].计算机工程与应用,2010,46(19):200-203.
YI Fa-ling,XION Wei.Research and implement of automatic adaptation 3-dimension face-modeling[J].Computer Engineering and Applications,2010,46(19):200-203.(in Chineses)
[3]杨宇,阚凌雁.基于激光扫描的人脸三维重建方法[J].红外与激光工程,2014,43(12):3946-3950.
YANG Yu,KAN Ling-yan.Face 3D reconstruction based on laser scanning system[J].Infrared and Laser Engineering,2014,43(12):3946-3950.(in Chineses)
[4]DUDEK P.Fdm 3D printing technology in manufacturing composite elements[J].Archives of Metallurgy and Materials,2013,58(4):1415-1418.
[5]REICH C,RITTER R,THESING J.3-D shape measurement of complex objects by combining photogrammetry and fringe projection[J].Optical Engineering,2000,39(1):224-231.
[6]WARD K,BERTAILS F.A survey on hair modeling:styling,simulation,and rendering[J].Ieee TransactionsonVisualizationandComputerGraphics,2007,13(2):213-234.
[7]魏振忠,樊妍睿,张广军.光栅式双目立体视觉传感器的立体匹配方法[J].红外与激光工程,2010,39(2):330-334.
WEI Zhen-zhong,FAN Yan-rui,ZHANG Guang-jun.Stereo matching method for raster binocular stereo vision sensor[J].Infrared and Laser Engineering.2010,39(2):330-334.(in Chineses)
[8]林源,桂良琰.基于真实感三维头重建的人脸替换[J].清华大学学报:自然科学版,2012(5):602-606.
LIN Yuan,GUI Liang-yan.Face swapping based on 3-D photo realistic head reconstruction[J].J Tsinghua Univ(Sci&Teh),2012(5):602-606.(in Chineses)
3D portrait printing based on raster binocular vision technologies
WU Xian-hui1,2,CHEN XU-bing1,2,HU Tai-ran1,2
1.School of Mechanical and Electrical Engineering,Wuhan Institute of Technology,Wuhan 430205,China;2.Hubei Key Laboratory of Chemical Equipment Intensification and Intrinsic Safety(Wuhan Institute of technology),Wuhan 430205,China
Hair is a typical feature of the human body.It is difficult to obtain 3D information of hair by optical measurement because of its dark colour,thin and loose structure,which brings some difficulties for 3D scanning and portrait modelling.A complete portrait model was obtained firstly by merging scan data with hairstyle data which based on establishing hairstyle template library,and then a face of 3D plastic was printed by employing the fused deposition modelling technology.A half-length acrylonitrile-butadiene-styrene plastic portrait of 80.29 mm×92.54 mm×63.1 mm was produced in the laboratory.The results show that the mean deviations of ABS plastic face are between 0.134 mm and-0.170 mm,and the overall deviation is stable.It demonstrates that the proposed method is feasible with better appearance and higher precision of 3D portraits.
raster measurement technique;3D portrait modeling;3D printing;hairstyle template library
TB35
A
10.3969/j.issn.1674-2869.2015.11.011
1674-2869(2015)11-0052-06
本文编辑:陈小平
2015-10-09
湖北省教育厅重点项目(D20131507);武汉工程大学第六届研究生教育创新基金资助项目(CX2014032)
吴献辉(1990-),女,湖北荆门人,硕士研究生.研究方向:快速成型.*通信联系人
猜你喜欢
大学物理(2022年7期)2022-07-26
广西物理(2020年3期)2020-07-09
电子制作(2019年20期)2019-12-04
西安工程大学学报(2016年6期)2017-01-15
现代计算机(2016年11期)2016-02-28
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
汽车文摘(2015年11期)2015-12-14
第二课堂(课外活动版)(2015年6期)2015-10-21
销售与市场·管理版(2015年5期)2015-05-05
湖南大学学报·自然科学版(2014年3期)2014-12-30
