
基于信息预测的机电复合传动发动机起动控制*
2015-04-12 08:28郑海亮项昌乐王伟达韩立金张东好
汽车工程 2015年5期
郑海亮,项昌乐,2,王伟达,2,韩立金,2,张东好
(1.北京理工大学机械与车辆学院,北京 100081; 2.车辆传动重点实验室,北京 100081)
2015088
基于信息预测的机电复合传动发动机起动控制*
郑海亮1,项昌乐1,2,王伟达1,2,韩立金1,2,张东好1
(1.北京理工大学机械与车辆学院,北京 100081; 2.车辆传动重点实验室,北京 100081)
机电复合传动系统由纯电模式切换为混合驱动模式时,须要拖转起动发动机。由于发动机响应的滞后性,通常由电机提供额外的驱动转矩,以保证车辆的动力性。但过大的电机转矩会导致电池的放电电流过大,特别是电池的温度较低时,会影响电池的使用寿命。本文中提出了一种基于信息预测的机电复合传动系统发动机起动控制策略。首先,通过采集机电复合传动系统当前和过去的转矩需求信息,应用自适应递归多步预测算法,完成对机电复合传动系统的需求转矩的在线预测。然后利用预测的机电复合传动系统转矩需求信息,对发动机的起动过程进行控制,避免了电池的过载现象。在保证车辆动力性的前提下,能有效延长电池的使用寿命。
发动机起动控制;机电复合传动;信息预测
前言
机电复合传动系统是混联式混合动力电动汽车传动系统的一种形式,它利用行星机构将两个电机集成到传动系统中,在传动系统输入转速基本不变的情况下,通过改变两个电机的转速状态,使传动系统输出转速连续变化,因此又被称为机电无级变速器(EVT)[1-4]。机电复合传动系统根据驾驶员的踏板信息提供驱动转矩,车辆速度较低时,一般工作在纯电驱动模式,由电机提供驱动转矩。随着车速的增加,系统的需求功率超过电池允许的输出功率时,起动发动机进入混合驱动模式。当系统的操纵状态发生改变时,由于发动机响应滞后,通常由电机提供额外的需求转矩,以保证车辆的动力性[5]。当车辆冷起动,而电池的温度又比较低时,过大的电机转矩可能导致电池的放电电流超过最大允许电流,会缩短电池的使用寿命[6]。如果车辆的需求转矩可以预测,基于预测的需求转矩对发动机输出动力进行控制,能够有效延长电池的使用寿命。因此,本文中基于预测信息的机电复合传动系统进行发动机起动控制策略研究。
关于系统需求信息的预测,在统计和信号处理中,有外界输入的自回归(ARX)模型被广泛用来代表一定的随机过程,如描述输出变量线性依赖于先前数据和输入的时变随机过程[7-8]。借鉴于这些预测算法,本文中基于机电复合传动系统当前和过去的数据,采用有外界输入的自回归(ARX)模型,应用自适应递归多步预测算法,完成对机电复合传动系统的需求转矩信息的预测,然后利用预测的机电复合传动系统需求信息,对发动机的起动过程进行控制,改善系统中电池的工作状态,延长电池的使用寿命。
1 机电复合传动系统
1.1 机电复合传动系统的结构
本文中研究的机电复合传动系统主要用以满足重型车辆驱动大功率、大转矩的需求,系统结构如图1所示。系统由电机A、电机B、3个行星排、离合器CL0、离合器CL1、制动器B1和动力输入与输出等部分组成。R、C、S分别代表行星排的齿圈、行星架和太阳轮。
1.2 机电复合传动系统的工作模式
机电复合传动系统的工作模式主要有纯电驱动模式、发动机起动模式、混合驱动EVT1模式、混合驱动EVT2模式和制动能量回收模式等,前4个模式下各部件的工作情况如表1所示。
1.3 发动机起动过程及其动力学分析
车辆处于纯电驱动状态时,由于加速或爬坡等情况系统需求功率增加,须起动发动机,以共同驱动车辆。在离合器CL0接合后,电机A提供起动发动机所需转矩,保证发动机从静止到设定转速的过程不超过0.4s,使发动机正常及时地起动[9]。

表1 机电复合传动系统工作模式
注:●表示接合;○表示分离。
CL0离合器接合后,机电复合传动系统的转速、转矩关系为
(1)
(2)
式中:ki为各行星排特性参数,是齿圈齿数与太阳轮齿数的比值,i=1,2,3;nA,TA分别为电机A的转速和转矩;nB,TB分别为电机B的转速和转矩;ni,Ti分别为系统的输入(发动机输出的)转速和转矩;no,To分别为系统输出的转速和转矩。
要求发动机快速平稳地起动,电机A须在规定的时间内(设定为0.4s)将发动机拖转起动,并以怠速转速(设定为800r/min)稳定运行。通过上文分析可知,要使发动机在一定的时间内达到设定转速,电机A的转矩需求和相关的约束条件为
(3)

2 机电复合传动系统仿真模型
机电复合传动系统的仿真模型由车辆控制系统模型、系统各部件仿真模型和车辆系统动力学模型等组成,结构如图2所示。
在车辆控制系统模型中,驾驶员模型用于模拟驾驶员的操作,以跟踪给定的期望车速;车辆控制器模型用于控制发动机和电机分别输出动力,以满足驾驶员的驱动转矩需求,包含能量管理策略和动态协调控制算法。
系统部件仿真模型包括发动机及控制器模型、电机及控制器模型、动力电池组模型和耦合机构模型等。车辆的动力学模型应用车辆行驶动力学方程进行表示。仿真模型中,系统各种参数如表2所示。
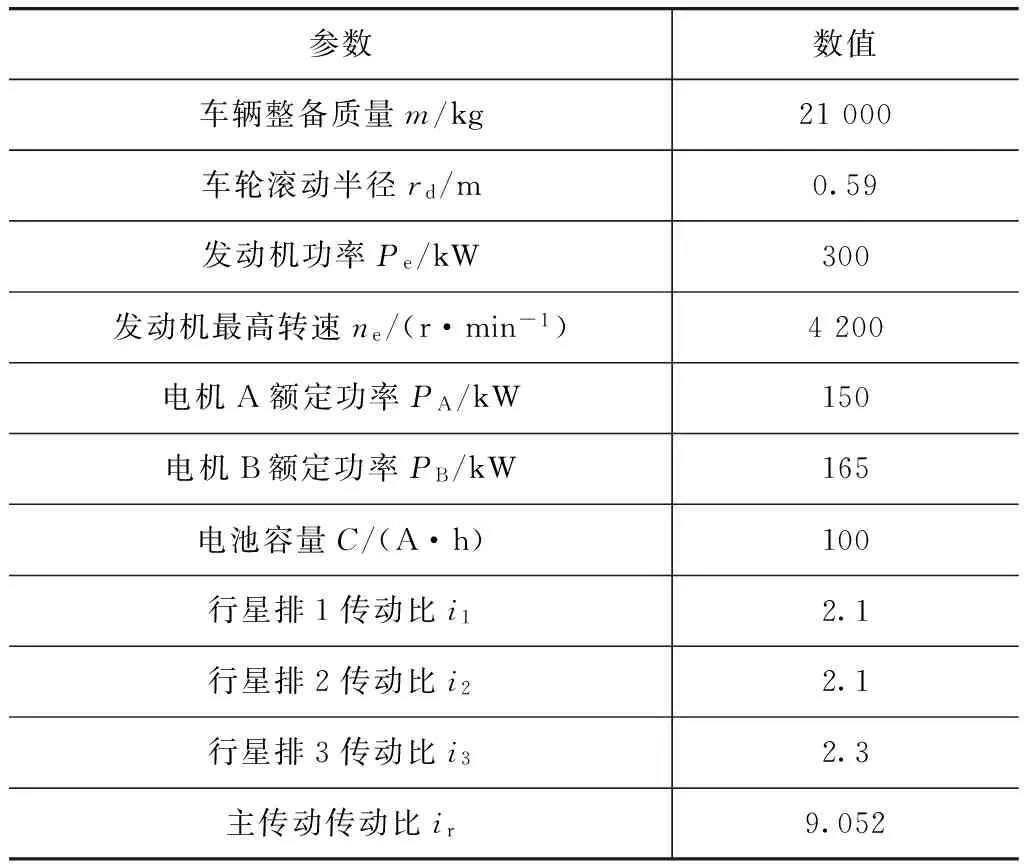
表2 机电复合传动系统相关参数
3 系统需求转矩预测
基于机电复合传动系统的当前和过去的转矩需求和踏板行程信息,采用ARX模型,对机电复合传动系统的需求转矩信息进行预测,预测流程如图3所示。
在k时刻,ARX预测模型的表达式为
(4)
式中:u为踏板信息;y为系统的需求转矩信息;yp为预测的需求转矩信息;ai,bi分别为y和u的权重系数;m为设定预测信息的步长。
为了建立预测输出与已知输出之间的关系,式(4)可以改写为
(5)
其中:


分别定义向量Yp(k)、Y(k)和Φ(k)为
Yp(k)=[yp(0)yp(1) …yp(k)]T
Y(k)=[y(0)y(1) …y(k)]T
Φ(k)=[φn(0)φn(1) …φn(k)]T
ARX模型多步自适应递归预测可以定义为
(6)
式中α∈(θ,1](θ>0)和β≥1为迭代回归预测算法的权重系数。α<1,用于遗忘过去的采样数据削弱过去数据对于预测结果的影响,α越小过去数据遗忘越快,但过快的遗忘会导致过去信息的缺乏,导致预测的精度变差;β≥1用于增加当前采样数据的权重,使得预测结果更加符合当前的实际工况。通过参数α和β可以调节过去和现在数据在回归算法中的贡献度,以适应不同的车辆行驶工况,提高预测算法的自适应性。
为了计算每步的回归权重系数,定义价值函数为
(7)
应用最小二乘法求解可得
[α2ΦT(k-m-1)Y(k-1)+
(8)
综合式(4)~式(8),应用文献[10]中的推导过程,自适应递归预测算法可归纳为
(9)
同时,为了防止权重系数α过小导致过去数据的过多丢失,使得预测的精度变差,须对系数α进行限制,采取以下规则:
(10)
式中:satα(·)为α(k)的饱和函数,确保α(k)∈(θ,1];sate(·)为e(k)的饱和函数,确保-errmax≤e(k)≤errmax,errmax>0;γ>0为可调增益;Pn为矩阵P(k)F范数的目标值。
自适应递归多步预测算法的计算流程如图4所示。
预测算法的预测步长为0.01s,根据发动机的起动时间需求,预测步数设定为40步。针对FTP循环工况,自适应递归多步预测算法仿真结果如图5所示。转矩的预测误差约为4%,可以满足实际的应用需求。
4 发动机起动控制策略
基于预测的系统需求信息,对发动机起动过程进行控制,控制策略流程图如图6所示。
控制策略主要由电池供电能力的判断和发动机的拖转起动两部分组成。首先,根据电池的温度和SOC信息计算当前状态下电池的供电能力,与通过预测获得的机电复合传动系统需求信息进行比较,判断电池的供电能力是否满足系统的驱动需求。当电池功率不足以提供预测的系统需求功率时,提前拖转起动发动机进入混合驱动模式,避免电池功率的过载。系统控制策略给出发动机起动指令后,根据式(3)对电机A的输出转矩进行控制,快速平稳地实现发动机的拖转起动。
5 硬件在环仿真
5.1 硬件在环仿真平台
硬件在环仿真平台由综合控制器ECU、dSPACE实时仿真系统、双模式机电复合系统动力学模型和驾驶员与转矩预测模型组成,其结构如图7所示。
驾驶员控制信号通过实时仿真接口模块(RTI)的A/D接口输入到含有系统控制策略的综合控制器中,机电复合系统Simulink仿真模型被转换成C语言代码后下载到dSPACE硬件板卡中运行,dSPACE系统通过RTI模块的CAN通信接口实现与综合控制器之间的信息交互,包括模型状态和预测信息的反馈和控制信号的传递。
实时仿真界面能动态实时地显示仿真过程中系统的关键参数和各个部件的运行状态。
5.2 硬件在环仿真测试
基于硬件在环仿真平台,对基于预测的机电复合传动系统发动机起动控制策略进行了性能验证。普通驾驶工况仿真结果如图8所示。其中,加速/制动踏板行程进行了统一处理,范围为[-100%,+100%],正值为加速踏板行程,负值为制动踏板行程。系统工作模式编号:0为驻车模式;1为纯电驱动模式;2为混合驱动EVT1模式;4为混合驱动EVT2模式;5为制动模式。
在仿真的驾驶工况下,根据反复变化的踏板行程反映驾驶员的加速/制动意图,双模式机电复合传动系统驱动车辆以不同的车速行驶,如图8(a)和图8(b)所示。根据车辆速度和系统需求驱动功率的变化,系统在不同的工作模式间切换,如图8(c)所示。车辆速度较低、机电复合传动系统需求功率较小时,系统工作在纯电驱动工况,车辆速度增加系统需求功率较大时,发动机起动,系统进入混合驱动模式。基于预测的机电复合传动系统发动机起动控制策略,根据预测的系统需求信息,提前起动发动机完成了纯电驱动到混合驱动的模式切换。
在系统模式由纯电驱动向混合驱动模式转变时,由于发动机动力的响应迟滞,为了保证车辆的动力性,需要电池提供额外的补偿功率。系统电池功率的变化如图8(d)所示,基于预测的发动机起动控制策略,在11.6s时提前进入混合驱动模式,将电池的极值功率由221降至162kW,改善功率需求26.7%,能够有效减少电池功率的过载现象,延长电池的使用寿命。
为了进一步验证发动机起动控制策略,分别针对NYCC、US06、FTP、IM240等4种典型循环工况进行了仿真,结果如表3所示。

表3 典型循环工况仿真结果
6 结论
(1) 基于机电复合传动系统的当前和过去的数据,采用有外界输入的自回归模型,应用自适应递归多步预测算法,完成了对机电复合传动系统的需求转矩信息的预测。
(2) 利用预测的机电复合传动系统需求信息,建立了基于预测信息的机电复合传动系统发动机起动控制策略。
(3) 硬件在环仿真结果表明,开发的基于预测的机电复合传动系统发动机起动控制策略降低了电池的极值功率,减少了电池功率的过载,能有效延长电池的使用寿命。
[1] Liu J, Peng H, Modeling and Control of a Power-Split Hybrid Vehicle[J]. IEEE Transactions on Control Systems Technology,2008,16(6):1242-1251.
[2] 韩立金,刘辉,等.双模式混合驱动装置电机参数匹配[J].吉林大学学报(工学版),2011,41(6):1527-1531.
[3] Kim N, Kim J, Kim H. Control Strategy for a Dual-mode Electro-mechanical, Infinitely Variable Transmission for Hybrid Electric Vehicles[J]. Journal of Automobile Engineering,2008,222(9):1587-1601.
[4] 郑海亮,项昌乐,王伟达,等.双模式机电复合传动系统综合控制策略[J].吉林大学学报(工学版),2014,44(2):311-317.
[5] Fu Z X. Real-time Prediction of Torque Availability of an IPM Synchronous Machine Drive for Hybrid Electric Vehicles[C]. Proceedings of the IEEE International Conference on Electric Machines and Drives, San Antonio, May,2005:199-206.
[6] Pesaran A. Battery Thermal Management in EVs and HEVs: Issues and Solutions[C]. Advanced Automotive Battery Conference, Las Vegas, NV, USA, February,2001.
[7] Taieb S B, Sorjamaa A, Bontempi G. Multiple-output Modeling for Multi-step-ahead Time Series Forecasting[J]. Neurocomputing,2010,73(10):1950-1957H.
[8] Cheng H, Tan P, Gao J, et al. Multi-step Ahead Time Series Prediction[C]. Proceedings of the Tenth Pacific-Asia Conference on Knowledge Discovery and Data Mining (PAKDD), Singapore,2006:765-774.
[9] 庄杰,杜爱民,许科.ISG型混合动力汽车发动机启动过程分析[J].汽车工程,2008,30(4):305-308.
[10] Kailath T. Recursive Estimation Methods, In System Identification: Theory for the User (2nd Edition)[M]. New Jersey 07632: Prentice-Hall, Inc., Englewood Cliffs,1987:306.
Engine Start Control for Electro-mechanical TransmissionSystem Based on Information Prediction
Zheng Hailiang1, Xiang Changle1,2, Wang Weida1,2, Han Lijin1,2& Zhang Donghao1
1.SchoolofMechanicalEngineering,BeijingInstituteofTechnology,Beijing100081;2.NationalKeyLabofVehicularTransmission,Beijing100081
When the electro-mechanical transmission (EMT) system switches to hybrid drive mode from pure electric mode, it is required to crank and start the engine. Due to the response lag of engine, the motor usually provides additional driving torque to ensure the power performance of vehicle. However, the excessive motor torque can cause too large a battery discharge current, in particular, when battery temperature is relatively low, may affecting the service life of battery. In this paper, an engine start control strategy for EMT system is proposed based on predictive information. Firstly by sampling the present and past information on system torque requirement and applying adaptive recursive multi-step predictive algorithm, the online prediction on the required torque of system is completed. Then the predicted information on the torque requirement of system is used to control engine starting process with the phenomenon of battery overload avoided. Hence on the premise of ensuring vehicle power performance, battery life can be effectively extended.
engine start control; EMT; information prediction
*国家自然科学基金(51305026)资助。
原稿收到日期为2014年4月3日,修改稿收到日期为2014年8月25日。
猜你喜欢
中国造纸(2022年8期)2022-11-24
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年7期)2022-04-20
青少年科技博览(中学版)(2022年1期)2022-03-28
一重技术(2021年5期)2022-01-18
商品与质量(2021年43期)2022-01-18
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
进出口经理人(2021年8期)2021-02-12
建材发展导向(2019年10期)2019-08-24
