
两轮自平衡代步滑板的机械结构设计与有限元分析
2015-04-12 08:35王一博刘博文
黑龙江工程学院学报 2015年4期
王一博,卿 铜,刘博文
(黑龙江工程学院 汽车与交通工程学院,黑龙江 哈尔滨150050)
近几年,自动平衡技术发展十分迅速,该技术在各行各业里得以广泛的应用,特别是在电动车领域,用于代步的自平衡车得到人们的密切关注。在2001年,美国发明家狄恩卡门(Dean Kamen)与他的DEKA研发公司(DEKA Research and Development Corp.)团队发明设计了世界上第一辆能够自主平衡的人类运输工具Segway[1]。Segway内置5个精密固态陀螺仪来判断车身所处的姿态,通过精密且高速的中央微处理器计算出适当的指令后,两台驱动马达来做到平衡效果,最高时速25km,最大载重110kg。在2004年,中国科技大学屠动武、张培仁等[2]研制出了两轮自平衡代步车Free Mover,其车架和轮轴位于同一水平面上,以两台低速有刷电机作为动力来源,车重30kg,最高时速30km。
两轮自平衡车主要由控制系统和机械结构两大部分组成。控制部分则采用当前流行的动平衡技术,而在结构方面,无论是在国内还是在国外结构形态都基本相似,驾驶者直立在平台上,双手控制操纵机构。同时,自平衡独轮车也渐渐进入人们的视野。本次设计的自平衡电动滑板不仅可以当做滑板使用,而且用户还可以体验到与滑雪板和冲浪板一样的运动感受,更重要的是解放了用户的双手。两轮自平衡车(segway)和自平衡独轮车(IPS)的机械结构各有优点,因此笔者结合两者结构优点提出一个新的结构方案,并对关键部件进行有限元分析。
1 两轮自平衡代步滑板的平衡原理
图1为两轮自平衡代步滑板在水平路面上行驶的物理模型。如果某一瞬间驾驶者与竖直方向成一倾斜角θ,同时给车轮一个顺时方向的力矩M=M0,让车轮在路面上加速滚动,由于惯性的存在,滑板不会绕车轮轴A转动但会有平动产生。与此同时,轮胎与地面的静摩擦力f为临界驱动力,排除空气阻力和车轮滚动阻力的影响,可以得到M0与f 的关系式[3]为

式中:M0为临界驱动力矩;f为临界驱动力;R为车轮半径;m2为车轮质量。
对于临界驱动力f,文献[4]中可以得到表达式

式中,m1为驾驶员(包括滑板车架及操纵机构)的质量。

图1 自平衡滑板的受力分析
将式(2)代入式(1)得

如果使M>M0,滑板将绕车轮轴A逆时针转动,回到竖直位置,达到平衡效果。
2 两轮自平衡代步滑板结构设计
2.1 基本设计参数
滑板长度900mm,滑板宽度220mm,滑板整体重量20kg,平衡角度-8°~8°,最大爬坡角度10°,最大载重100kg,最大车速15km/h,平均车速10km/h。
2.2 车架的结构设计
为了全面准确地了解两轮自平衡代步滑板的外观,便于最终方案的确定,在其设计制作之初,运用 Autodesk Inventor Professional[4]软件中的零件设计模块对车架部分进行三维设计,得到以下两种设计方案[5],如图2、图3所示。

图2 方案1

图3 方案2
方案1与传统的滑板结构类似,两轮自平衡代步滑板采用平行结构。滑板上表面平整,滑板前后结构对称,前部和后部,采用两层钢管结构,滑板中部一层钢管。
方案2与传统的滑板不同,两轮自平衡代步滑板采用梯形结构。设计初始的滑板模型大致可分为前、中、后3个部分。中间部分向上凸起,前后两部分则是由上下两根钢管构成,四周用梯形钢管做成倒角。
对比方案1和方案2,在外部条件相同的情况下,可以得出方案2的重心要比方案1更低。对于操纵稳定性,由于重心更低,加上气流压力的作用,让两轮自平衡滑板更稳定,抓地力更强,让两轮自平衡滑板在行驶时更为平衡稳定,转向时不容易倾侧,因此操控性更强,转向时的安全性也更好,在受到威胁时可以快速转向而不轻易翻车,稳定系数高。综上所述,方案2更加符合操纵稳定性的要求,所以选方案2为两轮自平衡滑板车的车架。
2.3 轮毂法兰盘的设计
以互换性为原则,轮胎为选购标准的尺寸,在选购轮胎时轮胎本身自带轮毂,但轮胎与电机无法连接,所以在原有轮毂基础上添加了一个法兰机构,构成了轮毂法兰盘,如图4所示。该机构直接把电机的动力传递给车轮,可以避免不必要的传动机构,并有利于减少传递过程中机械损失。此外,轮毂和法兰设计成一体式,以便轮胎的拆装和更换,有利于降低维修的难度。

图4 轮毂法兰盘
2.4 两轮自平衡滑板的整体布置
图5 为两轮自平衡滑板的整体结构图,图中显示的是主要零部件,支撑面和传感器部分等被隐藏。
该滑板主要由前、中、后3部分组成。前后两部分则是由上下两根钢管构成,在滑板车架的中部有足够的空间安装电机和驱动板等零件。后部两根钢管的间隙可以放置锂电池板和电池板保护垫,电机则安装到中部梯形结构钢管的下方。

图5 整体结构
3 车架的有限元分析
目前国内应用比较多的有限元分析软件主要是ANSYS[6],但由于其涉及学科众多,建模比较复杂,所以其应用有一定难度。而Autodesk Inventor Professional软件中的有限元分析模块是以ANSYS软件的网格划分和数值运算的内核技术,因此不仅在建模、施加力和约束方面的操作比较简单,而且在运算结果方面也比较准确。本文则主要基于 Autodesk Inventor Professional软件中的有限元分析模块对车架进行分析[7]。
车架由矩形方钢管(材质Q235钢[8],尺寸规格宽×高为20mm×20mm,厚度为2mm)焊接而成。主要参数见表1,车架承受驾驶者的重力载荷和电机连接处的支反力。中间4根管的底面为固定约束对象,为了简化分析,车架只受到驾驶者的压力,用静态值来计算,保留充足的安全系数,来减少计算过程中产生的误差。约束车架中间4根支撑钢管的底面,如图6所示;向左右两侧12个受力面施加载荷,如图7所示,所施加载荷为


表1 材料参数

图6 车架所受约束示意图
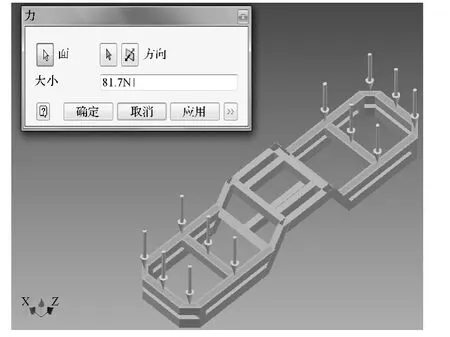
图7 车架受力示意图
表2为车架的有限元分析结果。该车架的本体材料为Q235,从材料手册[9]查出其弹性模量E=196~216GPa,泊松比为0.3,计算后显示,最大应力为18.953 7MPa,如图8所示。在不考虑约束影响造成的局部过大应力的情况下,应力较大的值分布在车架梯形钢管连接处,远小于材料的许用应力235MPa。如图9所示,最大位移为0.056mm,变化非常小,所以,该车架的静力分析满足设计要求[10]。

图8 车架应变和应力云图

图9 车架应变和应力云图

表2 分析结果
4 结束语
两轮自平衡代步滑板以自平衡技术和传统滑板相结合,成为新型的城市代步工具,具有良好的发展前景,笔者对车架进行设计和有限元分析,从分析结果看出,车架的强度达到预期设计要求。
[1] Essa.Segway次世代的移动方式[J].城色,2008(7):110-113.
[2] 张培根,屠运武,张先舟,等.自平衡两轮电动车[P].中国:CN 1502513A2004-6-9.
[3] 程刚,屈胜利,刘学超.两轮自平衡小车可控角度的推导研究[J].伺服控制,2008(6):51-52.
[4] 胡仁喜.Autodesk官方标准教程系列[M].北京:电子工业出版社,2014.
[5] 苏梦香,郑超欣,王佳梅,等.基于 Autodesk Inventor的三维参数化设计方法[J].机械设计与制造,2007(6):168-169.
[6] 赵雨旸.基于ANSYS的变速器齿轮有限元静力学分析[J].黑龙江工程学院学报:自然科学版,2009,23(9):1-10.
[7] 李现友,段伟.Inventor有限元分析模块的实例应用[J].包头职业技术学院学报,2009(4):20-22.
[8] 丁发兴,余志武,温海林.高温后Q235钢材力学性能试验研究[J].建筑材料学报,2006(2).
[9] 付建勋,李京社,汪春雷,等.Q235钢杨氏弹性模量的研究[J].材料导报,2009(18):68-70.
[10]张三川,彭楠,李霞.两轮自平衡电动车的结构设计与有限元分析[J].郑州大学学报,2011(1):30-33.
猜你喜欢
上海涂料(2021年5期)2022-01-15
乐活老年(2019年4期)2019-05-20
小学生导刊(2018年4期)2018-04-18
制造技术与机床(2017年10期)2017-11-28
中国自行车(2017年1期)2017-04-16
小猕猴智力画刊(2017年3期)2017-03-24
制造业自动化(2017年2期)2017-03-20
学与玩(2017年12期)2017-02-16
读者·原创版(2016年12期)2016-12-13
作文与考试·小学高年级版(2016年2期)2016-09-10
