
排土机俯仰液压系统的改进及仿真优化
2015-04-25 01:43肖艳军付景海王亚旭关玉明
机床与液压 2015年8期
肖艳军,付景海,王亚旭,关玉明
(河北工业大学机械学院,天津300130)
排土机是一种大型高效的物料运输设备。我国现在正处于工业化时期,重工业发展迅速,煤炭等固体能源和固体矿物资源的需求量在不断扩大,排土机作为大型物料运输机械受到越来越广泛的应用。排土机主要由履带行走机构、受料臂、配重臂、俯仰机构、排料臂等部分组成,见图1。
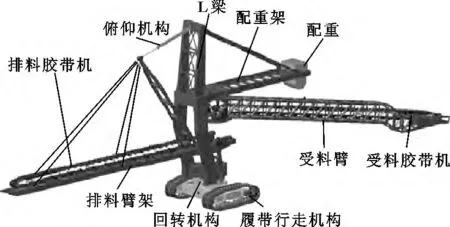
图1 排土机组成
其中俯仰机构承受排料臂的重力,并通过俯仰液压缸的伸缩实现排料臂的俯仰和物料的分层堆积。故对俯仰机构进行分析至关重要。排土机俯仰机构分为上部钢丝绳起吊和下部液压缸支撑两种形式。为了保证受力平衡,下部液压缸支撑形式通常是用两个液压缸支撑,需保证两液压缸同步,由于液压缸密封性差异及受力不平衡等诸多原因导致液压缸不同步,会造成液压缸损害。而上部钢丝绳起吊只有一个液压缸,避免了不同步问题。排土机俯仰机构通常采用上部钢丝绳起吊。此处要分析排土机俯仰结构为上部钢丝绳起吊形式。
1 排土机俯仰液压系统设计及AMESim 仿真
1.1 排土机液压系统设计
排土机俯仰部分由机械系统和液压系统组成。机械系统包括俯仰液压缸、排料臂和作为连结的钢丝绳。其动作主要是通过俯仰液压缸伸缩,由钢丝绳带动排料臂升降。由设计要求可知,此设计中是通过液压缸伸缩来实现悬臂的频繁间歇上下运动,并要保证悬臂在某一位置能够保持不动,即不能因悬臂重力使之自由下降。因此需要考虑的基本回路有卸荷回路、保压回路等。
排土机作业时,通过排料臂俯仰实现物料的分层堆积[1]。要求臂架上升、下降能快速换向以实现堆料效率。但如果液压缸速度过快,一旦超过液压泵所能提供的最大速度,工作腔中将出现真空,会导致出现液压缸超速回缩或者拉伸的危险工况。这就要求系统必须保证一定的供油压力,并在液压缸快速运动的同时不能有严重冲击,以免造成过大的瞬时倾覆力矩,危害整机稳定性。而负载敏感变量泵可以根据负载大小和调速要求对泵进行控制,故选用负载敏感变量泵[2]。设计出原理图如图2 所示。

图2 排土机俯仰液压系统原理图
1.2 排土机液压系统改进
排土机俯仰部分排料臂上下动作时,重心相对于液压缸发生左右移动,液压缸所受力发生变化,即液压缸负载发生变化。由于负载决定液压泵的流量,流量决定了液压缸缸杆的速度,所以排土机排料臂升降速度也发生改变,这对排土机俯仰部分稳定性极其不利。
为了解决压力负载变化带来的排料臂升降速度变化问题,在液压系统中加入定差减压型压力补偿器[3]。如图3 所示,定差减压型压力补偿器由梭阀4和减压阀5 组成。当液压缸3 缸杆受力变化时,液压缸有、无杆腔压力通过梭阀4 比较,当发生变化时,通过反馈给减压阀5 调节其开口量大小,改变减压阀进出油口压力,从而达到保持液压缸有、无杆腔的压力恒定[4]。

图3 改进俯仰液压系统原理图
1.3 排土机液压系统AMESim 仿真
AMESim 包含机械、信号控制、液压、液压元件设计等工程学科的应用库。对液压系统来说,设计者可以通过AMESim 直接对其进行物理建模,并对该系统进行仿真优化,从而降低开发成本和缩短开发周期[5]。
1.3.1 俯仰液压系统原理图AMESim 建模
首先,对排土机俯仰机构液压系统建模,依据上一节的俯仰部分液压系统原理图,建立AMESim 液压模型。由于俯仰部分液压缸所受力不固定,比较复杂,而作者要分析的是液压缸杆在变力作用下是否能保持速度一致,验证该系统是否合理。为了便于分析研究,将作用在液压缸缸杆的力分为两个不同大小的阶段。根据仿真结果,判断系统是否合理。AMESim模型如图4 所示。

图4 AMESim 俯仰液压模型图
1.3.2 AMESim 液压模型设置仿真参数
仿真成功与否,除了正确建立模型以外,参数的合理性也必不可少。各模型主要参数如表1 所示。选出正确且合适的模型元件,并对这些元件进行参数赋值是至关重要的。

表1 俯仰液压系统参数表
简化后的液压缸缸杆受力如图5 所示,t=0 ~4 s时,设液压缸缸杆受力1.03 ×106N,t =4 ~8 s 时,设液压缸缸杆所受力为0.98 ×106N。
设置仿真时间为8 s,采样频率为1 000 Hz,进行仿真,得到俯仰液压缸缸杆速度曲线,如图6 所示。
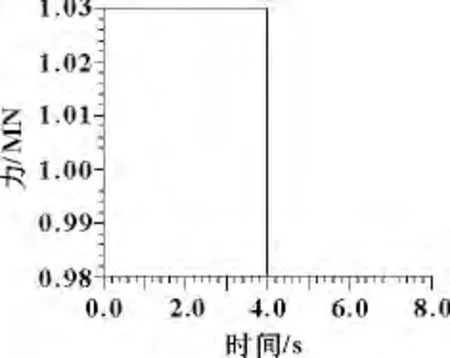
图5 俯仰液压缸受力图

图6 液压缸缸杆速度图
由图6 易知:t =0 ~4 s 时,液压缸缸杆速度稳定在0.035 m/s;t=4 ~8 s 时,液压缸缸杆速度稳定在0.024 m/s。缸杆在受力发生变化时,会出现较大的速度波动。由于俯仰液压缸在较长时间内,受力从1.03 ×106N 到0.98 ×106N,变化不是很大,不会出现像图6 所呈现的速度波动。从图6 得出:液压缸杆在不同力作用下,速度大小不同,不稳定。
1.4 改进排土机俯仰液压系统AMESim 仿真
通过分析验证易知,原设计俯仰液压系统不能保证速度的稳定性,下面用AMESim 分析上一节所设计的改进俯仰液压系统是否合理。首先,建立改进俯仰液压系统AMESim 模型,由于AMESim 中没有改进俯仰液压系统中相应的减压阀子模型,需要自己创建模型。建完的系统模型如图7 所示。

图7 AMESim 俯仰液压系统改进模型图
1.5 AMESim 液压模型设置仿真参数
建模成功后,接着对模型元件进行选型、参数赋值。除了减压阀参数外,其余参数和原液压系统一致。
同样设置系统的仿真时间为8 s,采样频率为1 000 Hz,对改进液压系统进行仿真,得到俯仰液压缸缸杆速度曲线,如图8 所示。

图8 改进后俯仰液压缸缸杆速度图
由图8 易知:改进的俯仰液压缸缸杆速度一直稳定在0.03 m/s。速度曲线波动较原液压系统大是因为所建减压阀模型不是理想的减压阀,其余液压元件均为理想元件所造成的。在t=4 s 时有较大波动,但很快就达到稳定状态。验证了上一节分析结果,改进液压系统维持了液压缸杆速度稳定。
2 总结
通过AMESim 分析,原先设计的液压系统确实存在压力发生变化时速度跟着变化的问题,而改进后液压系统在压力发生变化时,液压缸缸杆还能以固定速度运动。改进液压系统在排土机俯仰液压系统中俯仰液压缸需要速度稳定的情况下,解决了这个问题,证明了改进液压系统的可行性,验证了定差减压型压力补偿器解决了速度不稳定问题的结论。
[1]TAKAHASHI H,HASEGAWA M,NAKANO E.Analysis on the Resistive Forces Acting on the Bucket of a Load-Haul-Dump Machine and a Wheel Loader in the Scooping Task[J].Advanced robotics,1998,13(2):97-114.
[2]MITCHELL J P.Load Sensing Hydraulic Control System for Variable Displacement Pump:US,US6216456[P].2001-04-17.
[3]NAKAMURA O.Pressure Compensator for Rotary Earth Boring Tool:US,US4407375[P].1983-10-04.
[4]WILKE R A.Hydraulic Control Valve System with Nonshuttle Pressure Compensator:US,US5890362[P].1999-04-06.
[5]武小明,韩静粉,张晓光,等.排土机皮带自动张紧系统设计[J].自动化应用,2013(7):17-19.
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
模具制造(2020年6期)2020-08-03
模具制造(2019年10期)2020-01-06
中国矿山工程(2019年1期)2019-03-01
世界有色金属(2018年8期)2018-06-28
中国矿山工程(2018年2期)2018-05-04
现代矿业(2016年4期)2016-06-16
橡胶科技(2016年10期)2016-02-24
化工进展(2015年6期)2015-11-13
锻压装备与制造技术(2015年2期)2015-06-26
