
沥青路面压实实时监测及分析系统研究
2015-05-08 07:28张丽丽张立宏
现代交通技术 2015年5期
张丽丽, 张立宏
(1.苏交科集团股份有限公司,江苏 南京 210017;2. 山西永力实业有限公司,山西 太原 030006)
沥青路面的现场压实度指标是沥青路面施工质量控制的核心,国内外相关研究表明,压实度不足是导致路面早期损害的主要原因之一(水损害、老化、车辙等等)[1-2]。目前传统的碾压工艺主要依据压路机操作手的经验估算压实次数,通过施工完成后的压实度检测控制压实质量[3-4],由于压路机操作手无法及时获取当前路表温度信息,仅按照顺序进行碾压,部分路段的压实效果达不到要求,并且事后取芯检测压实度的质量控制方法不全面又滞后,无法满足过程质量控制的需求。
为解决传统碾压工艺所存在的问题,本文基于高精度GPS(cm级精度)、红外温度传感器等外部硬件设备,开发了基于碾压次数和碾压温度沥青路面压实实时监测及分析系统。该系统能够实现实时采集碾压过程中的压实次数和路表温度信息,并以彩图的方式实时地反馈给操作手,避免欠压和超压,不仅提高了沥青路面的压实质量,而且在提高施工效率、减少燃油消耗、保护环境方面都有积极的作用。
1 压实关键控制参数分析
1.1 压实度实时检测技术
目前已有的压实度实时检测技术主要包括CMV检测系统、日本酒井(SAKAI)CCV、BOMAG的Evib[5-7]。CMV检测系统利用振动轮垂直加速度谐波分量,反映材料被压实的程度,许多振动压路机制造商如Dynapae、Caterpillar都采用了CMV测试系统。日本酒井公司的CCV(Compaction Control Value)与CMV系统采用了类似的算法,与CMV系统相比,CCV较为完整地采用了加速度信号谐波分量。BOMAG认为随着铺层材料的压实,振动轮与被压材料之间的相互作用力将增大,振动轮加速度信号特征的变化正是这种力学特性变化的反映,将检测到的振动轮加速度信号通过信号处理并经过由力学模型确定的软件算法可计算出材料Evib,来表征材料压实状况。
目前,压实度实时检测技术已在土基、路基施工中得到了应用,并取得了良好的效果[8],但在沥青面层压实控制中应用较少,且精度较差。分析其原因,主要包括两个方面,一是实时压实度检测是基于振动压路机与被压材料动力学响应特征,只适用于振动压路机,不能在胶轮压路机中使用;二是路基厚度较大,材料较硬,可以准确得到土壤刚度数据;但沥青面层厚度小,沥青混合料材料软,刚度数据受土基、基层等影响,很难精确得到。
因此,考虑沥青面层的特点,本文暂不考虑实时压实度检测,而是通过控制影响压实度指标的关键参数,进而控制沥青路面的碾压过程。
1.2 碾压次数与压实度相关性分析
碾压次数决定对同一点施压的次数,受沥青黏度阻力及粒料间阻力等因素的影响,施压一次很难使内部颗粒达到最大的位移量,必须重复施压才能达到理想值,因此一般在碾压速度和压力一定的情况下,碾压遍数越多压实效果越好。但当混合料的密实度达到一定值后,再增加遍数就不会有明显的效果[9]。以某道面工程为例,工程的碾压方案为:初压,钢轮压路机碾压1遍;复压,钢轮压路机2遍,胶轮压路机1遍;终压,静压收面2遍。检测方案为:每隔50 m选取某一横断面,压路机每来回碾压算一遍,紧接着迅速读取数据并作记录,待碾压结束后整理对应横断面的密度测试数据。试验数据如图1所示。
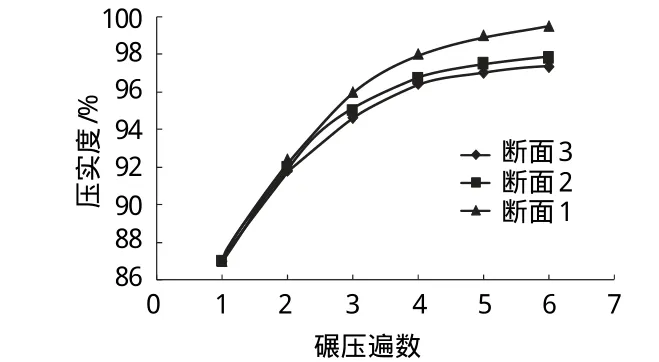
图1 压实度随碾压遍数的变化趋势
由检测数据可以看出,随着碾压遍数的增加,密度明显增大,且在1~4遍内密度呈直线增加,碾压5遍后密度慢慢趋于平衡,变化幅度较小。经过计算得出,初压时压实度为85%以上,复压时为95%左右,尤其在碾压2~4遍时压实度增加明显,最终趋于平衡时超过最大理论密度98%,满足规范要求。因此,针对此工程碾压以5~7遍为宜,不宜过多。
1.3 碾压温度与压实度相关性分析
碾压温度是压实质量控制的关键,直接决定路面成型的质量[5],温度过高,塑性越大,越容易压实,平整度越好;但温度过高,会导致混合料隆起、裂纹以及前轮推料等问题。而温度过低时,需要的压力较大,碾压工作变得较为困难,且容易产生很难消除的轮迹,造成路面不平整。
某项目沥青路面施工过程中(摊铺完成后),每隔1 min测1次沥青混合料的温度,得到的热拌沥青混合料温度随时间变化规律如图2所示。由图2可以看出,沥青混合料温度随时间的延长不断降低,要想达到较好的压实效果,必须把握碾压时机,尽可能在高温状态下完成碾压。
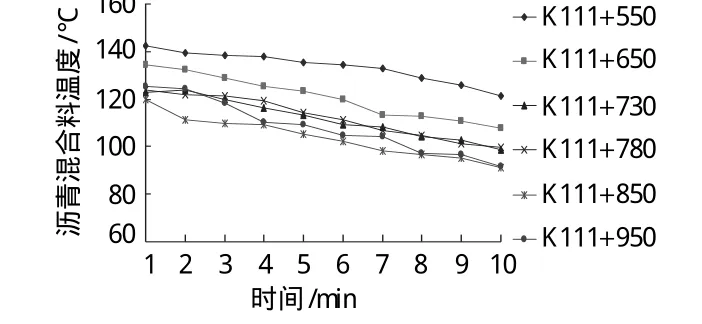
图2 压实过程中沥青混合料温度随时间的变化规律
1.4 碾压速度与压实度相关性分析
在振动压实过程中,被压材料的颗粒由静止的初始状态变化为运动状态有一个过程,碾压速度直接影响单位面积内振动轮对被压材料的压实时间。碾压速度快时,生产率高,但所得到的压实度低,并且容易导致路面的不平整。因此,既想达到规定的压实度,又要保持较高的生产率,就必须合理地选择工作行驶速度和碾压遍数。
2 硬件设备选型及开发
根据前文分析的压实监控系统关键控制参数的需求,本文在调研相关硬件设备的基础上,设计了系统的硬件模块,其中包括中心控制模块、电源模块、卫星定位模块、温度传感模块,如图3所示。
2.1 中心控制模块
本文中心控制模块基于通用的工控机,进行独立开模设计,保留系统需要的卫星数据输入接口、红外路面温度检测接口、振动加速度计扩展接口,减少工控机的多余端口,在控制器主板上,预留振动检测数据采集卡位置。此外接口采取了防抖动措施,避免施工中振动而导致通信接口脱落的情况。其设备接口图如图4所示。
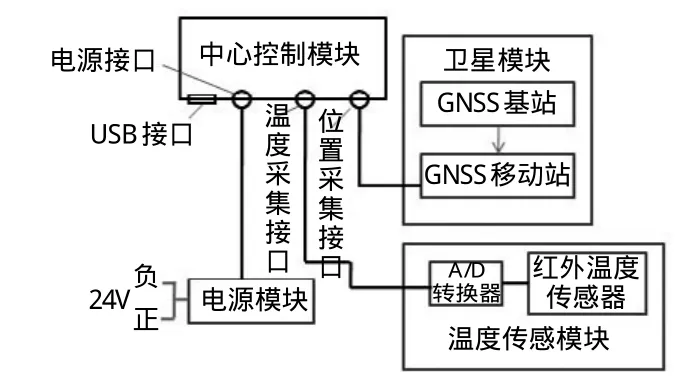
图3 硬件模块设计图
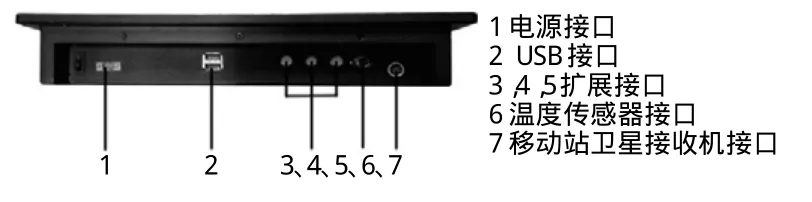
图4 中心控制模块接口
2.2 卫星接收模块
在施工过程中,位置信息、碾压次数信息以及速度信息主要由卫星定位数据组成。本系统采用了基于基站和移动站的差分定位技术,经过后期的路面试验,采用差分设备作为卫星信号接收处理模块,能够达到厘米级精度的位置信息采集,可以有效地将位置信息转换为碾压次数信息。
2.3 温度传感模块
经过多次测试论证,系统最终采用工业级的红外温度传感器—美国雷泰RAYCML TV3型温度传感器进行路面温度采集,该型号温度传感器检测温度范围为-20 ℃~500 ℃,满足现场施工温度要求。
3 软件控制系统功能模块开发研究
软件控制系统主要包括3个模块数据采集处理模块、实时监控模块和历史数据查询分析模块,其中数据采集和处理模块包括温度数据和卫星数据的采集和处理。
3.1 数据采集和处理模块
3.1.1 温度数据采集和处理模块
温度数据采集和处理模块接收温度传感器串口设备采集的温度数据,并将串口数据转换成温度数据,保存到数据库中。
3.1.2 卫星数据采集和处理模块
系统接收到的卫星数据是NMEA0183格式,需要将数据进行进一步处理,保存到数据库中。GPS位置数据采集和处理模块包括数据解析、数据量化、平面坐标转化。
(1)GPS数据解析
系统接收到的位置信息数据是NMEA 0183格式,需要进一步处理成系统需要的GPS位置信息。系统启动后,GPS移动站会不断地发送NMEA0183格式的数据包,它是一组包含有各种地理位置信息的字符串,控制系统只解析和本系统相关的信息,包括推荐最小定位信(GPRMC)和GPS定位信息(GPGGA)[13]。
(2)数据量化
压路机碾压次数彩图实时展示是本项目的核心。为了提高显示速率,数据采集和处理模块在对GPS数据分析之后,将其同步量化压缩;然后保存到数据库。通过量化,一定程度上减少了数据量,保证了项目的精度。
(3)平面坐标转化
GPS采集的数据是经纬度数据,而显示给操作手的是平面坐标彩图,因此需要根据转换规则,将经纬度数据转化成平面坐标数据,同时保存到数据库。
3.2 实时监控模块
实时监控模块可实时显示压路机的碾压次数轨迹、碾压速度和碾压温度,实时显示界面设计图如图5所示;界面的上方实时显示碾压温度和碾压速度,主体界面显示碾压次数轨迹图。

图5 实时监控模块展示图设计
碾压次数轨迹实时显示是项目的核心技术。由于压路机一直处于运动状态,路面单位面积压路机经过的次数一直在改变,这给压实次数统计带来了很大的困难,同时由于数据采集频繁,计算量大,单位时间处理数据量大是本项目实时碾压次数展示的瓶颈。为了解决问题,本文采用了以下核心技术。
(1)数据量化和监测视野缩小
本项目在采集卫星数据时,首先进行了数据量化处理,这在一定程度了压缩了数据处理的量。通过缩小监测视野,在满足施工实时检测的范围同时,大大减少了工控机单位时间处理的数据量,为压路机碾压次数实时展示奠定了重要的基础。
(2)alpha通道画笔绘图技术
传统的绘图模式采用路段分块绘图技术,无法实时展示碾压次数。由于卫星传回的压路机轨迹点离散点,首先需要根据压路机宽度连接并扩展为与压路机等宽的面路径,如果以秒为单位累加,数据会急剧增加,直至超出工控机运算速率造成死机,导致实时显示失败。
为解决以上问题,本文摒弃以路面ID为依据的路段分块绘图方法,采取根据压路机轨迹用彩色画笔直接画图的方法[11-12],彩色画笔利用压路机的折返点作为画笔的起点和终点,利用压路机的宽度作为画笔的宽度,利用画笔的alpha通道叠加原理,将压实次数信息记录在alpha通道中,通过读取alpha值,并将alpha值转换成RGB值,将画面转化成直观的彩色色码图。
3.3 历史数据查询和分析模块
历史数据查询和分析模块主要用于施工完成后,对当天或者固定某一段时间内碾压次数均匀性情况进行分析。系统以彩图的方式展示给用户,用户通过彩图可以查看当天或某一段时间内的整体施工情况、碾压次数不足区域以及碾压不均匀区域,为下一步的施工管理提供辅助支持。
4 系统应用测试与分析
为了检测系统合理性和稳定性,在实验室进行了多次模拟测试,并在嘉兴环城东路改造工程进行了现场测试。
嘉兴环城东路改造工程初压采用1台钢轮压路机,复压采用2台胶轮压路机,终压采用1台钢轮压路机。本次测试时间为一天,分别在初压的钢轮压路机和复压1号胶轮压路机安装了2台设备。
通过本次现场测试得出以下结论:(1)在硬件设备稳定性方面:各项设备在高温、强振的情况下都可以正常进行采集数据和运算分析工作 ;(2)在实时监控控制程序稳定性方面:在碾压过程中能够实现实时采集和处理碾压次数、温度和速度数据,并以彩图的方式实时展示给操作手,可以指导操作手施工;(3)初压单台钢轮压路机的碾压次数彩图如图6所示,从彩图可以看出,单台钢轮压路机整体碾压不均匀,碾压效果不是很好,初压只有1台钢轮压路机,碾压不及时,应增加1台压路机;(4)复压1号胶轮压路机碾压次数彩图如图7所示,整体比较均匀,但是碾压路面的边缘均匀性状况不是很好。通过碾压次数彩图,可以很好地指导操作手,达到更好的碾压效果。
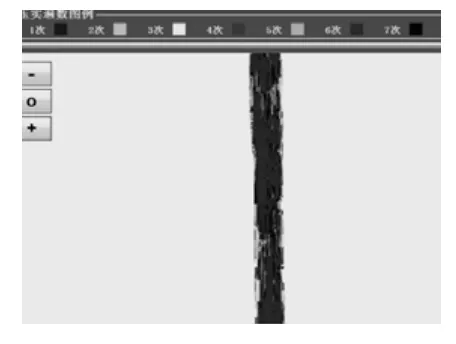
图6 初压钢轮压路机碾压次数彩图
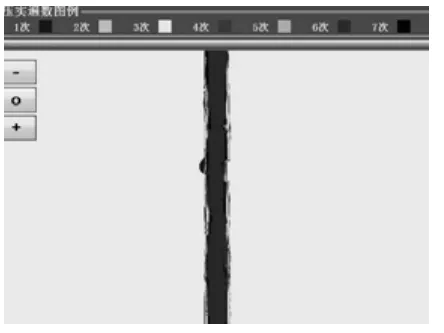
图7 复压1号胶轮压路机碾压次数彩图
5 结语
(1)本文开发的基于碾压次数和碾压温度的沥青路面压实实时监控及分析系统,一方面能够在施工过程中实时指导操作手完成预定的碾压次数,避免欠压或者超压,提高沥青路面压实质量;另一方面还可以分析在施工完成后,某一段路或某一段时间内碾压均匀性情况,为下一步的施工管理提供辅助支撑。
(2)实体工程测试结果表明,该系统在高温、强震的环境中运行稳定可靠,达到预期目标,满足实际工程需要。
(3)通过碾压次数彩图可以直观地看出碾压次数均匀性状况,然而如何准确判定均匀性区域和不均匀区域,还需要进一步提出碾压均匀性控制指标和控制方法,并将其方法纳入系统,由系统自动判定碾压均匀性区域和不均匀性区域,从而实现碾压次数均匀性的准确判定。
(4)关于后期的数据统计分析,本文仅实现了碾压次数的统计,建议进一步完善数据分析功能,如碾压温度彩图分析、碾压速度分析等。
[1]游东云,杨海.沥青路面压实度检测中的几个问题[J].工程技术,2009(22):68.
[2]李炎,杨伟良,付长凯.沥青路面压实度的主要影响因素及其提高措施[J].四川理工学院学报(自然科学版),2013,26(5):64-66.
[3]乔利红.高等级公路沥青路面施工质量过程监控技术研究[D].天津:河北工业大学,2006.
[4]杨春霞.碾压温度对 SMA-13沥青混合料压实特性影响分析[J].公路交通科技(应用技术版),2011,5.
[5]BOMAG Terrameter BTMOS BOMAG Compaction Management System BCM03 Compaction Control and Documentation Systems,1998.
[6]汪学斌,王宇峰,刘洪海.压实在线检测技术的发展现状及前景[J].筑路机械与施工机械,2011.03.
[7]Minchin Jr. R. Edward,Thomas,H. Randolph,Swanson,David C..Theory behindvibration-based,onboard asphalt density measuring system. Transportation ResearchRecord,2001.
[8]杨存柱.德国 BOMAG 公司BVC智能压实技术介绍[J]. 建筑机械技术与管理,2006.9.
[9]王春玲,李丛豪,栗威. 碾压遍数与温度对沥青道面压实度的影响研究[J].公路与汽运,2013,4.
[10]杜文雅,宋卫平.智能压实中的GPS测距技术探讨[J].公路,2012,7.
[11]杨亚. ASP. NET2.0高级编程[M].北京:清华大学出版社,2007.
[12]黄陇,李虎.Windows核心编程[M].北京:机械工业出版社,2008.
猜你喜欢
建材发展导向(2022年23期)2022-12-22
车主之友(2022年4期)2022-08-27
商品与质量(2021年43期)2022-01-18
动漫界·幼教365(大班)(2021年4期)2021-05-23
西部交通科技(2021年9期)2021-01-11
文苑(2020年8期)2020-09-09
东坡赤壁诗词(2018年5期)2018-12-17
凿岩机械气动工具(2017年3期)2017-11-22
中国工程咨询(2016年12期)2016-01-29
筑路机械与施工机械化(2015年11期)2015-07-01
