
大功率异步电动机新型软起动装置的设计与实现
2015-06-25 02:51王贵锋
电气传动自动化 2015年4期
李 峰,王贵锋
(兰州理工大学技术工程学院,甘肃兰州730050)
1 引言
交流异步电动机以其结构简单、低成本、高可靠性和维护方便等优点在各种工业领域中得到广泛的应用。电动机在负载时,会产生5倍-10倍额定电流强度的起动电流。特别是对大功率的电动机来说,大起动电流会对电网造成很大的冲击电流,影响其他负载的正常运行,从而引发故障。停机时,传统的控制方式使电动机转速在短时间内由额定转速降为零,会给设备带来冲击,降低电气使用寿命。
因此采用电力电子技术、半导体技术与计算机技术开发异步电动机软起动技术具有重要的实际应用价值和学术意义。本文设计一种由晶闸管组成的软起动装置,应用晶闸管移相技术,使加到电动机上的电压按某一规律慢慢达到全电压。通过适当地设置控制参数,可以使电动机的转矩和电流与负载要求得到较好的匹配。使用软起动技术,在电动机的选型上可以选用容量较小的电动机,也减少了不必要的设备投资,通过软停机技术,可以避免电动机瞬时停机带来的冲击,进一步延长设备的工作寿命[1]。
2 主电路设计
软起动装置的主电路采用典型的交流调压电路,即3组反并联的晶闸管构成调压电路,如图1所示。本设计中异步电动机的额定功率PN为50kW,额定电流ⅠN为100A。
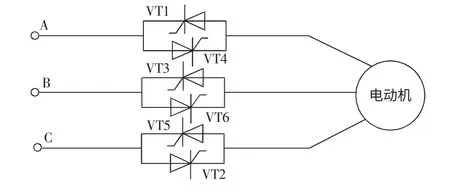
图1 软起动装置的主电路
3 控制电路的实现
系统的控制功能主要由控制算法来实现。在设计闭环调速系统时,设计了合适的动态矫正装置,用来改造系统,使它同时满足动态稳定性和稳态性能指标两方面的要求[5]。电压调节器和电流调节器均采用PI调节器。根据偏差的比例P、积分I进行控制。比例调节器的输出只取决于输入偏差量的现状,而积分调节器的输出包含了输入偏差量的全部历史。在模拟过程控制系统中,基本控制回路是简单的反馈回路。反馈值与给定值进行比较,得到偏差,模拟调节器用一定的控制律使操作变量变化,以使偏差趋近于零,实现无静差调速。
系统结构框图如图2所示,左边的6个方块是软起动器的6个环节,右边电机的传递函数。软起动装置的6个环节的功能是:环节1和2分别是外环电压调节器和内环电流调节器,它们的调节规律是比例积分PI。环节3是触发环节,提供晶闸管主电路的触发脉冲。环节4和5为放大环节和隔离环节,对信号进行放大和隔离。环节6为晶闸管的主电路。该系统既限制了电流,又使端电压平稳上升。由于是双闭环控制,保证了电机起动过程的稳定性及可靠性。

图2 双闭环软起动控制过程的系统结构图
4 软起动装置总体原理图的设计
4.1 电压反馈电路设计
反馈环节电压的获取,是通过电压互感器从主电路中获取电压,实现转矩控制时的电压闭环。电动机不能长时间地运行于过电压状态。同样,由于异步电动机负载有轻载和重载的变化过程,若电网电压不足,重载运行时可能会因为无法驱动负载而造成转速下降甚至发生堵转现象。在系统中加入了过压和欠压保护,因此需要电压检测电路。
三相电压反馈电路如图3所示,系统工作时,电压互感器输出的UA、UB、UC和三相电压分别经过全桥整流、滤波和分压后获得一个10V的直流电压信号,将此信号作为反馈输入信号接到触发芯片的电压反馈端。该电压反馈信号既作为系统软起动时的电压反馈信号,又可以作为电动机运行时的过压和欠压保护信号。
图3中的整流电容不能太大(这里取1μF),否则滤波后的电压变化不够灵敏,会产生较大的时间延时和误差。
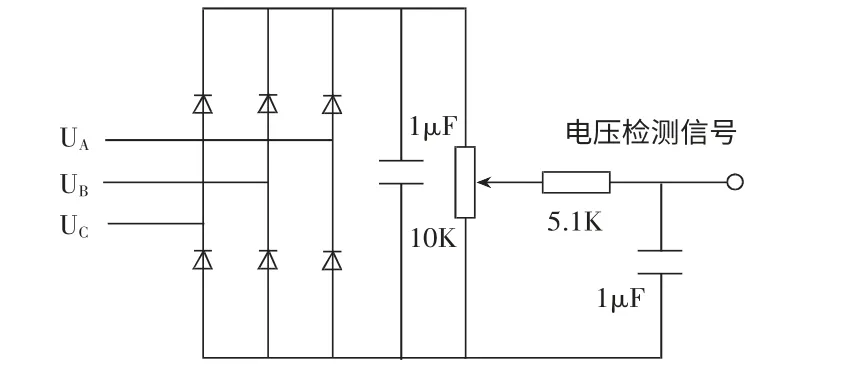
图3 电压反馈电路图
4.2 电流反馈电路设计
为了实现电流闭环和过流短路保护,设计了电流检测电路,如图4所示。采用电流互感器检测电动机定子端三相定子电流的大小,电流互感器的输出I′A、IA、IB、IC经过全桥整流、滤波和分压后获得一个1V直流电流信号,将此信号作为反馈输入触发芯片的电流反馈端作为电流反馈信号。把输入的同步电压信号改为电流信号。图4中的整流电容也取1μF,可调电阻R的最大值取10kΩ,可以较好地满足检测要求。另外,该电流反馈信号既作为系统软起动时的电流反馈信号,又作为电动机运行时的过流和短路保护信号。
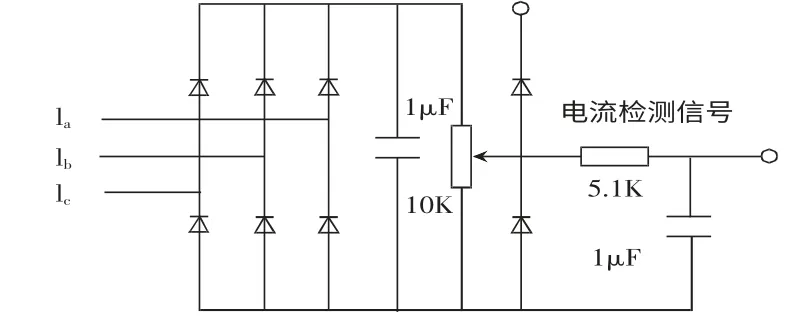
图4 电流反馈电路
4.3 系统总体原理图的设计
系统的整体设计如图5所示。起动电动机时,按下起动按钮后,电动机进入软起动阶段。通过集成触发芯片BSC6M-1三相晶闸管控制触发板控制触发脉冲,电压慢慢增加,直到达到全压电动机正常运行。电压和电流的双闭环的实现是通过电压、电流互感器,然后经过整流、分压得到反馈信号。通过给定与反馈的比较,用PI调节器实现无静差控制,使系统稳定运行。设计中还加入了各种保护措施,如过电压、过电流和晶闸管的电压上升率和电流上升率保护。
大功率的50kW异步电动机软起动装置的设计,采用了双闭环控制的三相交流调压电路;对于电压外环和电流内环的控制规律均采用PID控制中的比例积分实现无静差控制[7]。晶闸管的触发电路采用集成芯片BSC6M-1三相晶闸管控制触发板,其各项指标都满足设计要求。
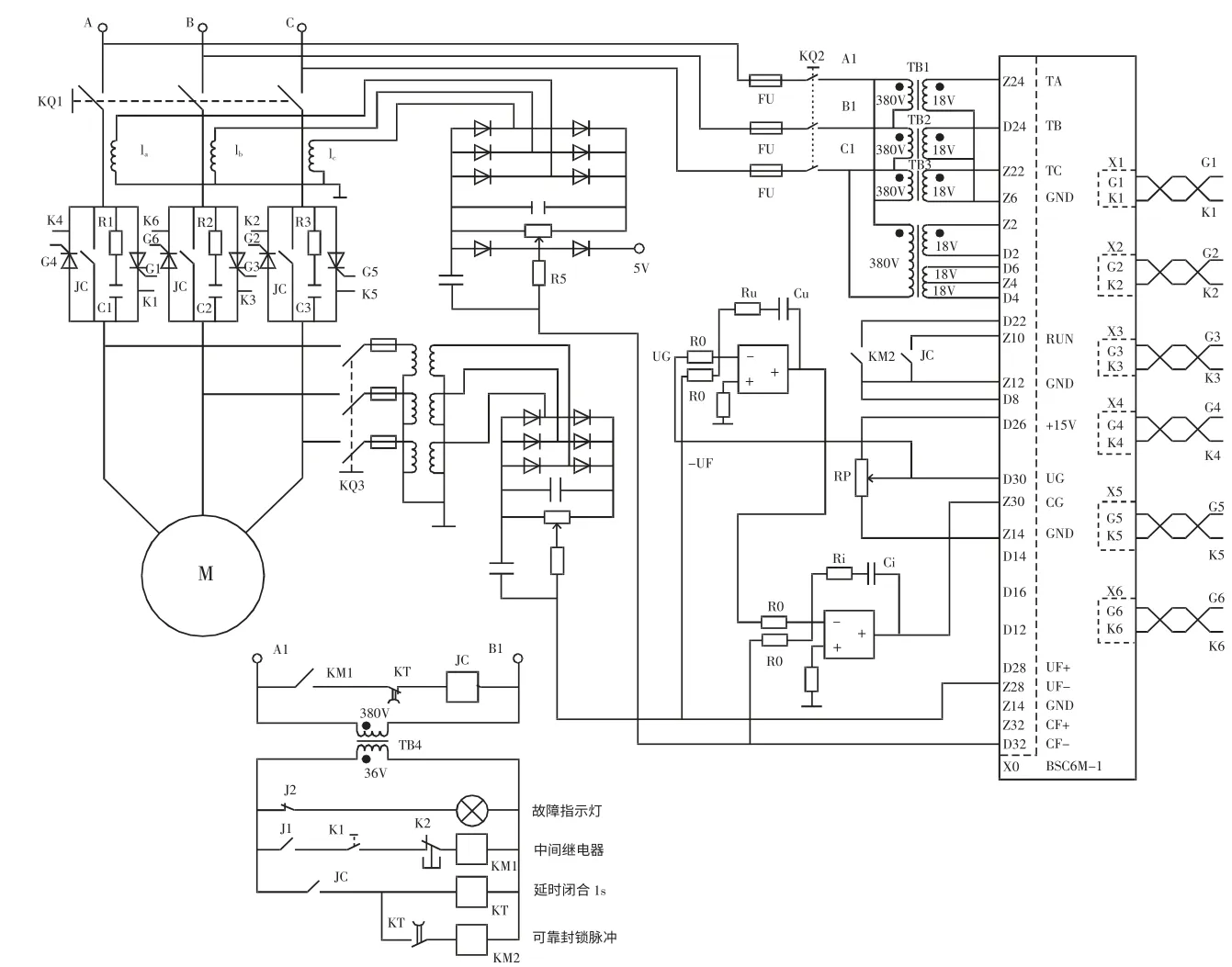
图5 50kW异步电动机软起动装置电路原理图
4.4 过电压保护
晶闸管整流电路正常工作的最大电压是线路的峰值电压,凡是超过这个峰值电压的都算是过电压。过电压分为操作过电压及浪涌过电压两种,操作过电压是由变压器的合闸以及晶闸管元件本身关断引起的,浪涌过电压是由于雷击等原因从电网侵入的偶然性过电压,它可能比操作过电压还要高。对操作过电压所设的保护措施,也会对浪涌过电压有抑制作用。
如图6所示为RC阻容吸收电路。软起动装置在每一相晶闸管两端并联RC阻容吸收回路进行电压上升率的限制。
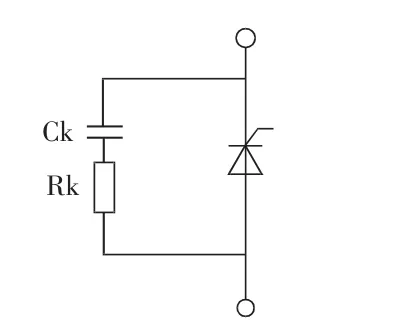
图6 RC阻容吸收电路
4.5 过电流保护
若过电流数值较大而切断电路的时间又稍长,则晶闸管因为热容量小会产生热击穿而损坏,因此必须设置过电流保护。在本系统中采用快速熔断器保护晶闸管的过电流[10]。采用控制电路中的电流调节器或电流截止环节来实现。当发生过载,电流超过一定数值时,通过调节环节移动触发脉冲相位降低整流电压,使电动机转速降低,从而将过载电流限制在一定数值之内;或通过封锁信号封锁移相触发脉冲。
5 结论
本文采用双闭环控制的三相交流调压电路设计了异步电动机软起动装置。对于电压外环和电流内环的控制规律采用PID控制中的比例积分实现无静差控制。根据电动机的参数选择主电路晶闸管的耐压值和额定电流。通过对三相交流调压电路中的6个晶闸管的相位控制实现控制电动机的电压,完成了软起动装置的设计。设计中集成芯片BSC6M-1三相晶闸管控制触发器,各项指标都满足设计要求。
通过对电动机的软起动装置的设计,减小了异步电动机起动过程中对电网的冲击、消除了传统降压起动设备的有级触点控制对异步电动机的冲击、改善异步电动机的起动特性。根据该电动机性能参数选取了合适的晶闸管元件,内环电流控制及外环电压控制采用PI控制,不但限制了电流,又使端电压平稳上升,实现了交流异步电动机平稳软起动。
[1]逄海萍,康 健,朱殿琪.异步电动机软启动节能控制器[J].电工技术,2001,(1).
[2]邱阿瑞,柴建云,孟 朔等.现代电力传动与控制[M].北京:电子工业出版社,2004.
[3]罗 飞.运动控制系统[M].北京:化学工业出版社,2001.
[4]钱 平.交直流传动控制系统[M].北京:高等教育出版社,2001.
[5]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.
[6]黄 俊,王兆安.电力电子技术[M].北京:机械工业出版社,1994.
[7]吕 锋,孙 杨.异步电动机的软起动器[J].华北电力技术,2001,(6).
[8]杨 伟,吴茂刚.电机软启动器的原理与应用[J].农机化研究,2005,3(2):21-25.
[9]李 翔,胡虔生.异步电动机软启动技术的应用及展望[D].江苏省电工技术学术论文集.江苏:苏州大学,2004.
[10]骆宝俊.异步电动机软起动器研究[D].江苏:南京理工大学,2007.
猜你喜欢
四川电力技术(2022年6期)2023-01-31
现代信息科技(2022年20期)2022-11-17
建材发展导向(2021年19期)2021-12-06
炎黄地理(2018年11期)2018-11-30
宇航计测技术(2018年3期)2018-09-08
电子制作(2017年2期)2017-05-17
通信电源技术(2016年4期)2016-04-04
东北电力大学学报(2015年1期)2015-11-13
汽车与新动力(2015年1期)2015-02-27
云南电力技术(2014年4期)2014-03-16
