
车辆紧急呼救系统中碰撞类型识别的新算法
2015-08-19 09:24陈望干金鹏史雪林黄晓磊
汽车工程学报 2015年3期
陈望+干金鹏+史雪林+黄晓磊

摘 要:车辆紧急呼救(automatic crash notification,ACN)系统中传统的车辆碰撞类型识别算法仅能判断四个碰撞方向且不能准确计算斜角碰撞的碰撞力主方向(principal direction of force,PDOF)。针对此问题,提出了改进的PDOF计算算法和碰撞类型识别新算法。研究表明,改进后的PDOF计算算法能够准确计算碰撞力的主方向并以此正确判断碰撞的方向,并且碰撞类型识别新算法能够通过y轴速度变化量以及|ΔVy|/|ΔVx|峰值出现时间上的显著差异而准确区分三种正面碰撞类型。与传统算法相比,新算法具有更好的准确性与可靠性。
关键词:紧急呼救;碰撞力主方向;碰撞类型识别;斜角碰撞
中图分类号:U461.91文献标文献标识码:A文献标DOI:10.3969/j.issn.2095-1469.2015.03.09
随着我国经济的发展,汽车保有量不断增加,车辆事故频频发生,造成大量人员伤亡。2013年全国发生道路交通事故198 394起,造成58 539人死亡,213 724人受伤,直接财产损失10.39亿元[1]。很多意外人身伤亡是由于事故后抢救不及时。为了提高事故救援水平,减少事故人员伤亡,欧美等国近年来开发了ACN系统并得到了广泛的应用[2]。
有研究表明,在所有的汽车与汽车碰撞事故中,汽车发生100%正面碰撞的概率为16%,其它各种正面斜角碰撞的概率占23%,侧面碰撞的概率为11%,追尾碰撞的概率为9%。Kononen等人表示初速度为64 km/h的碰撞,前、左、右、后的严重伤害风险分别为9%、38%、21%、3%,这一数据显示碰撞方向显著影响乘员伤害程度[3]。并且不同的碰撞类型对乘员的受伤严重程度和受伤部位有影响[4-5]。因此碰撞类型的准确识别,对于呼救中心救援资源的合理分配与救援方案的制定具有重大意义,能避免资源浪费,提高救援效率,同时也为事故后的现场勘查提供了可靠依据。
1 传统算法准确性分析
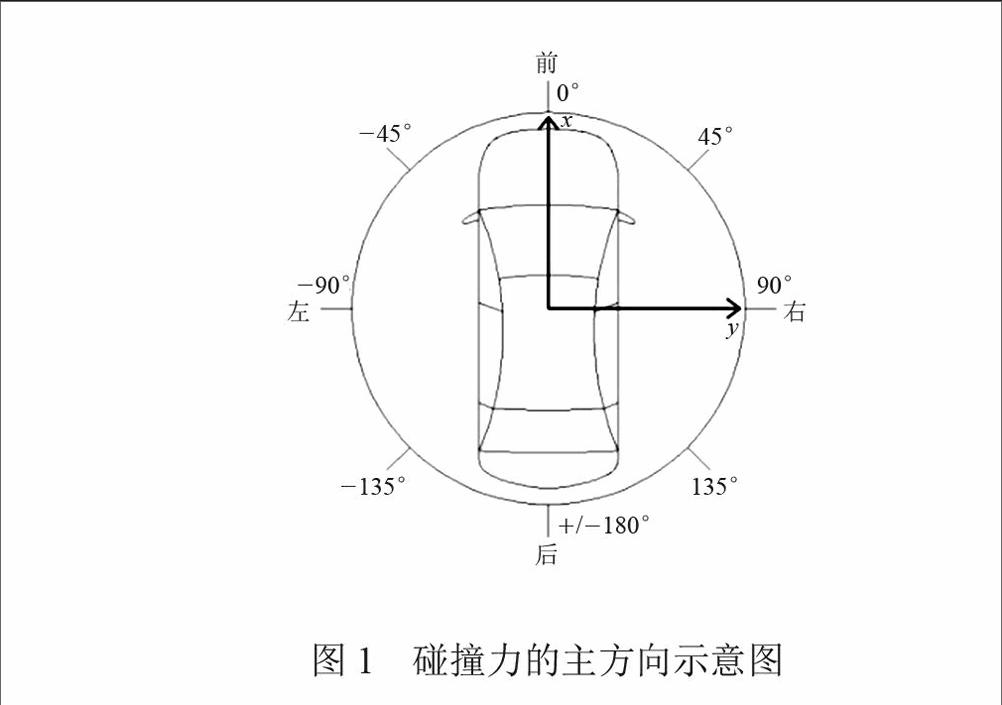
传统算法将PDOF作为碰撞方向的依据[6]。如图1所示,将-45°~45°作为车辆前部,-135°~
-45°为车辆左部,45°~135°为车辆右部,其余为车辆后部。
传统计算PDOF的算法主要有三种:ΔVmax算法,计算时使用x轴与y轴的最大速度变化量;ΔVmax,x算法,即计算PDOF时使用x轴的最大速度变化量以及当时y轴的速度变化量;ΔVmax, y算法,即计算PDOF时使用y轴的最大速度变化量以及当时x轴的速度变化量[7]。
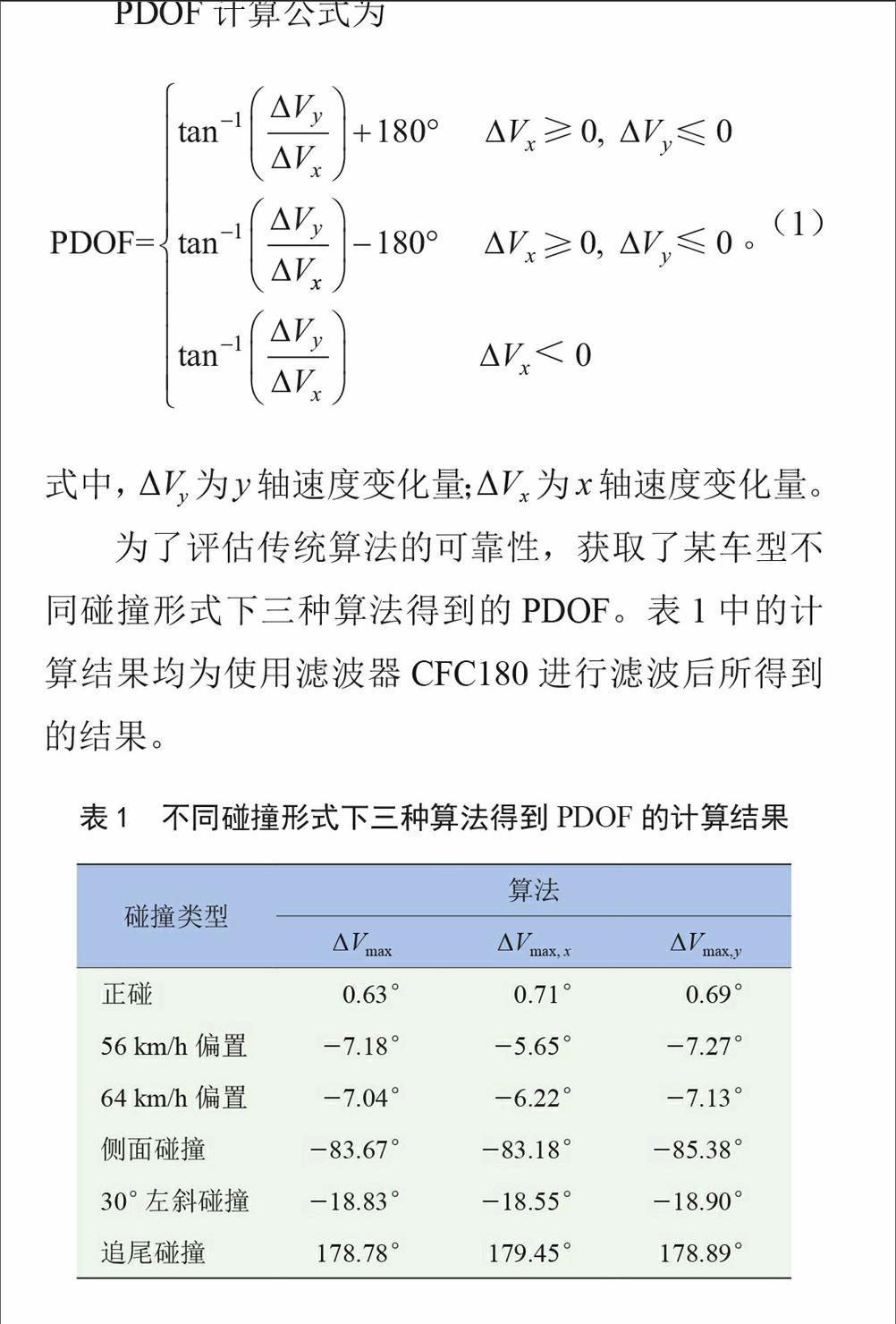
PDOF计算公式为
。
式中,ΔVy为y轴速度变化量;ΔVx为x轴速度变化量。
为了评估传统算法的可靠性,获取了某车型不同碰撞形式下三种算法得到的PDOF。表1中的计算结果均为使用滤波器CFC180进行滤波后所得到的结果。
三种传统算法计算结果之间差异较小,均能得出车辆的碰撞方向。但左30°斜角碰撞这项,PDOF计算有较大误差,且对于正面碰撞,无法识别其多样的碰撞类型。因此,现有的算法不能完全满足实际需求,有必要对现有的算法进行改进或构建一种新算法来识别具体的碰撞类型。
2 改进的PDOF计算算法建立及有效性验证
2.1 碰撞类型分类
如图2所示,传统算法中碰撞方向分为四种主要类型,即正面、左、右侧碰撞与追尾碰撞。由于车辆侧面的防撞性低于正面,侧面碰撞更容易对驾驶员或乘员造成严重伤害,因此将侧面碰撞分为左、右侧碰撞。因为正面碰撞在交通事故中所占比例高于其它三种碰撞类型,所以将正面碰撞细分为100%正面碰撞、偏置正面碰撞以及斜角正面碰撞。
2.2 计算算法建立
车对车碰撞作用阶段的时间在150 ms以内,而在0~50 ms期间车辆横摆角速度、横摆角等都几乎没有变化[8]。因此,当计算碰撞力的主方向时,可在0~50 ms区间内进行研究。
同一速度下不同角度的碰撞,角度越大,y轴最大加速度越大,即y轴碰撞强度越大;而相同角度不同速度碰撞时,汽车x、y轴的最大加速度随速度的增大而增大,但比值不变。因此在原有算法使用速度变化量作为计算变量的基础上,同时引入x、y轴加速度作为PDOF的计算变量。
。
如式(2)和式(3)所示,有两种PDOF的计算方法,公式相同,但计算变量不同,即碰撞发生后n ms内的x、y轴速度变化量和n ms内x、y轴的最大加速度作为计算变量。
式中,ΔVx、ΔVy为碰撞发生后n ms内x、y轴的速度变化量;axmax、aymax为碰撞发生后n ms内x、y轴加速度最大值。
2.3 计算时间区间的选取
为研究式(2)和式(3)中合适的ΔV积分和最大加速度选取的时间区间,在碰撞发生后35 ~55 ms这一时间段内进行研究,选取最准确的PDOF的计算值所对应的时间区间。图3~4是四款不同车型30°斜角碰撞试验下,PDOF计算值随时间变化的曲线,横坐标为时间,纵坐标为PDOF的计算值。
如图3所示,当计算变量为ΔV时,在50 ms这一点,也就是ΔV的积分区间为0~50 ms时,四种车型计算出的PDOF均接近于30°,最大误差能够控制在24.7%以内。如图4所示,选取最大加速度作为计算变量时,四种车型同样在0~50 ms区间内,计算结果均接近30°,最大误差也在19.8%以内。计算结果见表2。
表2所示为四款车型30°斜角碰撞的PDOF使用不同计算变量的计算结果。改进后算法的计算值均比传统算法准确,可将传统算法的计算误差至少减小18.43%以上,能够有效提升PDOF计算结果的准确性。因此可选取碰撞发生后0~50 ms这一区间内的速度变化量与加速度最大值作为PDOF的计算变量。两种算法均能较为准确地得出PDOF,并且当一种方法失效时,另一种方法可作为补充。
通过该算法对同一种车型六种不同碰撞类型的PDOF进行计算。如表3所示,两种方法计算得到的PDOF均能根据碰撞方向的划分原则,正确得出碰撞方向。当计算变量为最大加速度时,正碰、侧碰以及追尾碰撞的计算值虽有误差,但都控制在15%以内,并不影响碰撞方向的判断。存在误差是因为,以上三种碰撞,虽然车辆不会发生明显偏转,但垂直于碰撞方向上的加速度会有大幅值的震荡。这一现象对计算变量为最大加速度的PDOF计算值有一定影响,但对计算变量为速度变化量的计算值影响很小。
因此,改进的计算算法能够通过计算出PDOF,正确判断四种基本的碰撞类型。
3 碰撞类型识别新算法
通过改进后的PDOF计算算法得出碰撞方向后,如发生的是正面碰撞,需对正面碰撞的三种类型做出判断。
3.1 三种正面碰撞的动力学分析
偏置、斜角正面碰撞与100%正面碰撞不同,由于前两者受到的碰撞力并没有通过车辆的质心,所以,发生碰撞后,车辆沿y轴方向发生平移且绕碰撞点发生偏转;而100%正面碰撞由于碰撞力沿x轴方向,且经过质心位置,因此y轴方向的速度变化量显著小于偏置与斜角正面碰撞。通过碰撞发生后y轴速度变化量上的差异能够将100%正面碰撞与偏置、斜角正面碰撞区分开。
但是偏置正面碰撞与斜角正面碰撞在y轴速度变化量方面没有显著差异,并且高速情况下偏置正面碰撞的y轴速度变化量可能大于低速斜角碰撞的y轴速度变化量,仅从y轴速度变化量无法明显区分这两类碰撞,因此从y轴速度变化量与x轴速度变化量绝对值的比例值出发,研究两者区别。
图5为三种车型的偏置正面碰撞|ΔVy|/|ΔVx|随时间变化的曲线,前两条曲线为同一车型两种不同碰撞速度。这里|ΔVx|为x轴速度变化量的绝对值,|ΔVy|为y轴速度变化量的绝对值。0~10 ms内,y轴加速度有无规律剧烈震荡,有些情况下0~10 ms内的ΔVy会很大,|ΔVy|/|ΔVx|比值相对10 ms后的比值较大,因此为了更好地反映比值的变化趋势,图中横坐标时间起点为碰撞发生后10 ms。
10~40 ms内,4条曲线均出现比例值为0的情况,即ΔVy为0,但40 ms过后,比例值处于明显上升状态,4条曲线在72~100 ms时间段内分别达到峰值,之后呈下降趋势,峰值最大为0.25。这是因为,前40 ms车辆处于第一级碰撞区,此处刚度较小,车辆与壁障之间的力矩小于地面提供给车轮的摩擦力力矩,因此这段时间内ΔVy的值在0附近呈波动状态;而40 ms过后,车辆处于第二级碰撞区,此处由于发动机、纵梁及车架等刚体的存在,刚度明显大于第一级碰撞区[9],因此壁障与车辆之间的力矩足以克服地面提供给车轮的摩擦力力矩使车辆发生y轴方向的位移,此时ΔVy处于明显上升状态;车辆撞击至第三级碰撞区后,由于车辆已经发生了横向位移,壁障对车辆横向的作用力开始减小,ΔVy增长放缓,并且第三级碰撞区由于由转向管柱、防火墙、仪表板等结构组成,刚度略小于第二级碰撞区,因此ΔVx依然持续增长,|ΔVy|/|ΔVx|整体呈迅速下降趋势。120 ms后,车辆与壁障脱离,失去了碰撞力后,比值变化较小。同一种车型不同碰撞速度情况下,64 km/h碰撞比56 km/h碰撞只提前了4 ms达到峰值,但峰值大了0.08。速度上的差异在峰值上表现明显,但在峰值出现时间上差异不大。
图6为四种车型不同速度斜角碰撞试验|ΔVy|/|ΔVx|随时间变化的曲线,横坐标时间起点为碰撞发生后10 ms。10~40 ms内,3条曲线均没有出现ΔVy为0的情况,在30 ms过后,ΔVy处于明显上升状态,4条曲线在前50 ms内分别达到峰值,之后缓慢下降,峰值最小为0.426,且不同车速对峰值大小影响不大。这是因为壁障是斜角刚性的,因此碰撞初始阶段,车辆便发生y向位移,ΔVy不断增大,不会出现ΔVy为0的情况。车辆处于第一级碰撞区时,x轴的碰撞力较小,相应的ΔVx不大,因此比例值在20~40 ms有明显上升趋势;4条曲线均在前50 ms达到最大值;50 ms后,车辆处于第二级碰撞区,刚度较大,因此ΔVx迅速增大,比例值呈减小趋势。
由此可见,偏置正面碰撞与斜角正面碰撞在|ΔVy|/|ΔVx|峰值出现时间上存在显著差异,斜角碰撞峰值出现在50 ms前,而偏置正面碰撞出现在72 ms后。并且碰撞角度越大,峰值出现时间会越早,因为角度越大,壁障施加于车辆y轴的作用力越大,ΔVy增长越迅速。反观车辆x轴方向,角度越大,相对于小角度碰撞的情况施加于x轴的作用力减小,导致ΔVx增长放缓。因此,|ΔVy|/|ΔVx|峰值出现时间会随着碰撞角度的增大而提前,并且峰值会增大。
因此在相同碰撞速度下,斜角正面碰撞|ΔVy|/|ΔVx|峰值出现时间显著早于偏置正面碰撞,所以通过|ΔVy|/|ΔVx|峰值出现时间上的差异,能够区分偏置与斜角正面碰撞。
综上所述,不同的正面碰撞类型在y轴速度变化量以及|ΔVy|/|ΔVx|峰值出现时间上的显著差异,为识别不同的正面碰撞类型提供了可能。
3.2 新算法设计
为使碰撞类型识别新算法具有良好的抗路面干扰性,首先对路面干扰下的车身加速度曲线进行分析。图7为车辆以50 km/h速度过减速带时三个方向的车身加速度曲线。x、z轴有明显峰值,y轴峰值相对较小,所以车辆在路面行驶时,主要的干扰来源于x与z轴方向的振动。因此抗路面干扰算法主要围绕x与z轴的加速度设计。
图8为碰撞类型识别新算法的流程图。车辆行驶时实时采集车身三个方向的加速度。当x轴方向加速度小于admax时(admax为车辆制动时所能产生的最大加速度,此值为负值),对z轴方向加速度进行判断,当az大于azmax时(azmax为车辆过减速带或上台阶时z轴所产生的最大加速度),使用移窗法检测碰撞是否发生。
当检测到碰撞发生后,计算碰撞发生后50 ms内的ΔVx、ΔVy、axmax和aymax,并通过式(2)和式(3)计算出PDOF后,判断碰撞的四种基本类型。如果识别出的是正面碰撞,计算整个碰撞过程的|ΔVy|,当|ΔVy|小于1 km/h时,即为100%正面碰撞,当|ΔVy|大于1 km/h时,计算碰撞10 ms后|ΔVy|/|ΔVx|比值峰值出现时间t,如果t早于50 ms,即为斜角碰撞,反之为偏置碰撞。
4 结论
传统车辆碰撞类型识别算法通过计算PDOF进而判别车辆受到碰撞的方向,但其对斜角碰撞的PDOF计算有很大误差。通过改进的PDOF计算算法,对斜角碰撞的PDOF,可将传统算法的计算误差减小18.43%以上,提高了计算结果的准确性,并且以此正确判断车辆的四种基本碰撞类型。在此基础上对正面碰撞的三种类型进行判别,通过y轴速度变化量以及|ΔVy|/|ΔVx|峰值出现时间上的显著差异,能够准确将三种类型加以区分。与传统算法相比,新算法具有更好的准确性与可靠性。
参考文献(References):
中华人民共和国交通事故事故统计年报(2013年度)[M]. 北京:公安部交通安全管理局,2014.
Traffic Accident Casualty Statistic Report (2013) [M]. Beijing:Transportation Security Administration of Public Security Ministry,2014.(in Chinese)
CHAMPION H R,AUGENSTEIN J,CUSHING B,et al. Automatic Crash Notification and the Urgency Algori-thm:Its History,Value,and Use [J]. Advanced Emer-gency Nursing,2004,26(2):143–156.
KONONEN D W,FLANNAGAN C A C,WANG S C. Identification and Validation of a Logistic Regression Model for Predicting Serious Injuries Associated with Motor Vehicle Crashes [J]. Accident Analysis & Prevention,2011,43(1):112–122.
周航飞. 轿车前部斜角碰撞仿真及驾驶员损伤防护研究 [D]. 长沙:湖南大学,2009.
Zhou Hangfei. A Research on Drivers. Injury Biomechanics and Countermeasures in Vehicle Oblique Impact [D]. Changsha:Hunan University,2009.(in Chinese)
RAGLAND C L,FESSAHAIE O,ELLIOTT D. Evaluation of Frontal Offset/Oblique Crash Test Conditions [C]// Proceedings:International Technical Conference on the Enhanced Safety of Vehicles,2001:8.
GEISLER S,MICHELINI M. A Study of Crash Rates for Vehicles with Advanced Crash Avoidance Features [C]// SAE International Technical Paper Series,Number 2011-01-0587.
KUSANO K D,GABLER H C. Automated Crash Notifi-cation:Evaluation of In-Vehicle Principal Direction of Force Estimations [J]. Transportation Research Part C,2013(32):116–128.
魏郎,陈萌三,石川博敏. 车辆碰撞过程的试验分析研究 [J]. 汽车工程,2000,22(4):256-261.
Wei Lang,Chen Mengsan,HIROTOSHI I. An Experi-ment Research on the Car-to-car Collision [J]. Automotive Engineering,2000,22(4):256-261.(in Chinese)
Shun Yijin,ALTENHOF W. Control of Load/Displacement Responses of AA6061-T6 and T4 Circular Extrusions Under Axial Compressive Loads [J]. International Journal of Impact Engineering,2011,38(1):1-12.
