基坑变形的测量机器人自动化监测研究
2015-10-21 17:10谢旭阳
建筑工程技术与设计 2015年33期
谢旭阳
【摘要】本文主要论述的是基坑变形的测量机器人自动化监测的研究,开篇介绍了自动化测量的一些基本情况,对测量机器人做了具体的阐述,针对自动化测量的方法和流程,包括寻找目标、需要考虑的问题、位置的确定、范围的划分和监测点的基准确定等等,逐一进行了说明,然后記述了数据处理的一些知识,文章最后对全篇做了总结。
【关键词】测量;机器人;自动化;检测;基坑变形
随着我国人口数目的增多,有限的资源被无限的分配,人均资源是少之又少,而为了更好的利用资源,城乡都开始制定相应的政策法规来节约资源,乡镇棚户区纷纷改造成楼市区,而城镇的规划则向更高楼层发展,楼层越高,那么就意味着楼底的基坑越深,伴随而来就是挖掘技术的难度越来越大,而根据《建筑基坑工程监测技术规范》规定,开挖深度大于、等于5m或开挖深度小于5m但现场地质情况和周围环境较复杂的基坑工程以及其他需要监测的基坑工程应实施基坑工程监测。
一、系统需求分析
在我们的日常基坑监测工作中,引入了 LeicaTCA2003 测量机器人。为了能够充分地发挥测量机器人的功能,并最大范围地将其应用于日常测量任务中,我们整理了过去测量施工时所遇到的问题,针对这些问题,提出需求,并开发了一套自己的全自动测量系统。
1、项目管理
以往监测项目过程数据以文件、文件夹形式保存,容易混乱及丢失。故要求系统以项目形式进行管理,以数据库格式存储,保存着各期过程中的相关监测数据,包括基准点坐标、原始观测数据及结果数据等,方便数据分析、利用和经验积累。
2、自动测量
常规基坑监测,因需要多测回重复观测,作业人员须不停地来回跑动立尺。所以本系统需要满足:设站完成后,通过软件选择待观测监测点,测量机器人自动完成盘左、盘右多测回测量,遇到困难可自动智能处理。如当目标监测点遇到遮挡时,放弃当前测量,并根据设置的等待时间重新测量该点,或者在下一站补充测量。
3、安全预警
常规监测一般都是作业人员收工后,将数据传输至计算机,然后进行对比,在基坑变形比较快的情况下往往错失了最佳的报警时间。所以要求系统满足测量过程中实时报警,一是对当前测回的超限报警,如光学测微器两次重合读数差、半测回归零差、一测回内 2C 较差和同一方向值各测回较差等;二是对变化量进行报警,基坑监测的主要目的是为了工程安全顺利地进行,所以当监测点变形量、变化率或累计变化量超过预先设定的限差时,系统应能自动报警。
4、数据处理及图表输出
监测数据必须是及时的,做到当天测,当天反馈。所以要求系统能自动进行改正(包括气象改正、仪器加乘常数改正等)、整网平差、自动报表、输出变形趋势图及监测点各期坐标值等,尽可能少的干预,做到外业结束,内业亦同步结束。
二、系统设计
1、软硬件配置
硬件:TCA2003,大量预埋标,360 度棱镜,便携式笔记本为满足基坑高精度特点,系统采用0.5°高精度测量机器人Leica TCA2003,其在仪器内部安装了伺服马达,它通过内置的自动目标识别装置 ATR1发射出的激光束经棱镜反射后由CCD相机接收,实现自动寻找和自动精确照准目标。
软件:VS2008,C#语言,GeoCOM系统使用 C#语言,基于 Visual Studio 2008 平台开发,并调用 GeoCOM 接口开发基坑变形的测量机器人自动化监测系统数据采集模块。
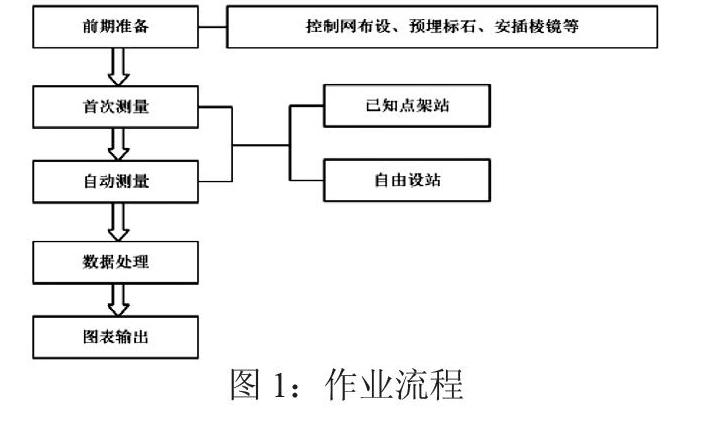
2、作业流程
预埋监测点标石,可安插360°全方位棱镜,作业前一次性安装好棱镜,除首次测量外,仪器定向后即可自动观测。
3、系统界面设计
多页面双屏管理,界面上方为数据,下方为图形,两者同步显示,可直观地了解到各监测点位置、属性及动态。界面上方显示监测点的观测记录等,下方显示底图及高亮显示监测点位置。每个测回中,已观测点红色显示,未观测点灰色显示。
4、软件模块设置
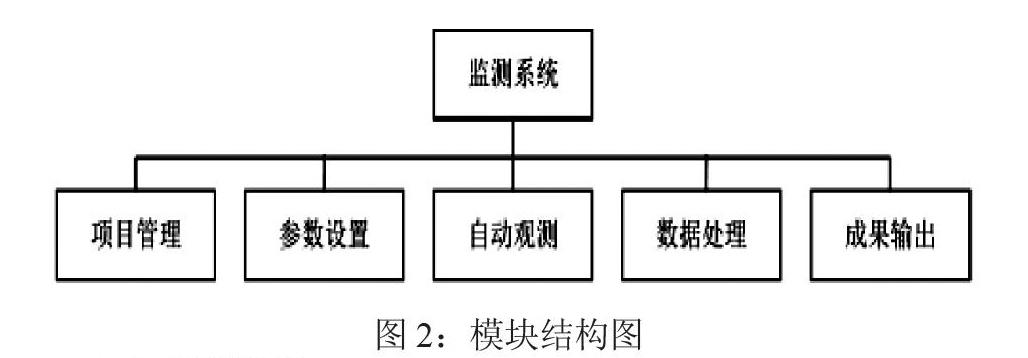
系统共有 5 个功能模块,各模块设有子项若干。
(1) 模块结构图
(2)系统设置
根据测量机器人属性,设置系统连接的各项通讯参数,包括串口号、波特率、仪器型号等。同时还包括测量机器人的附件棱镜的设置(类型、常数等) ;根据基坑监测的等级,设置观测等级及对应限差、测回数等;根据当日实时环境,设置气象信息等;除此之外的特殊情况设置,如点位遮挡、多目标、超限处理等。
(3)自动观测
项目第一次开展须进行首次测量,首次测量前须录入监测基准点及工作基点信息,而后在工作基点上架站,人工照准各个目标点,输入各点点号,获取目标点概略空间位置信息,以便于计算机控制测量机器人自动测量。自动观测可根据系统设置的信息、控制点及目标点坐标信息,自动完成多测回观测。可根据需要选择监测点及分组。
(4)数据处理
数据处理模块满足不同架站模式的数据处理功能,除已知点架站模式外,还兼容自由网架站模式。同时考虑到作业中的操作失误,增加了数据的后期修改功能。数据处理前须对观测值进行改正,包括气象改正、水平角差分改正等。在数据处理流程中,拟稳平差用于针对基准网进行平差处理,在对基准网进行拟稳平差处理后,可在基准网修正数据的基础上,采用经典平差方法对监测网进行平差。
拟稳平差坐标的互协因数矩阵
其中,I为3n阶的单位阵;F、E为3n阶的方阵,除拟稳点所对应的列由3×3的单位阵组成外,其他列元素均为零。数据处理过程中,如果发现超限,系统自动报警。
(5)成果输出
建筑基坑监测的目的在于:检验设计计算理论、模型和参数的正确性;及时反馈,指导基坑开挖和支护结构的施工;确保基坑支护结构和相邻建筑物的安全;提高基坑工程设计和施工水平积累工程经验。所以系统在数据处理完成后,自动输出阶段性报表,在项目完全结束后,输出总结性报表。包括本次测量值、单次变化值、变形速率、累计变形等信息,并附注折线图。对达到或超过监测报警值的监测点做报警标示,结合各期数据,生成基坑变形模型并预测变形走势,对监测项目给予判断性结论。
四、结束语
基坑变形的测量机器人自动化监测的研究是针对未来监测的发展方向,在科技的进步中不断的摒弃糟粕才能一直立于发展的潮流中,而传统的监测模式已经跟不上科技发展的浪潮,只能被淹没在历史的洪潮中。自动化的监测解放了人的劳动力,还能得到较为精确的监测结果,这一显著的优势就是它领先的资本,从手动到半自动,再到全自动,凝结了人类智慧的结晶,而智能机器人与电脑的联用更是谱写一个测绘的新篇章。
参考文献:
[1] 张君华,张宇琳,许文涛.基坑变形的测量机器人自动化监测研究及系统设计.测绘技术装备[J].2015,11(1):91-93.
[2] 范本,宋运辉.测量机器人自动化变形监测通讯技术研究.北京测绘[J].2015(2):74-76.
猜你喜欢
军事文摘·科学少年(2017年4期)2017-06-20
军事文摘·科学少年(2017年2期)2017-04-26
中国市场(2016年36期)2016-10-19
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
少儿科学周刊·儿童版(2016年1期)2016-03-14
少儿科学周刊·儿童版(2016年1期)2016-03-14
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07