
数字鱼雷的军事应用及其技术方案
2015-10-24 06:27李本昌
水下无人系统学报 2015年6期
李本昌, 李 原
(海军潜艇学院 软件中心, 山东 青岛, 266042)
数字鱼雷的军事应用及其技术方案
李本昌,李原
(海军潜艇学院 软件中心, 山东 青岛, 266042)
按照作战仿真研究和部队模拟训练的需要, 针对现代鱼雷技术复杂、与其武器系统交互关系密切的实际,提出了数字鱼雷的概念和构建数字鱼雷的技术要求, 设计了鱼雷弹道模型和外界控制模型及接口关系, 采用以型号关联性能参数、以仿真进程和战术态势关联弹道阶段的外弹道仿真设计方法构建了数字鱼雷的技术方案。最后应用Visual C++面向对象的程序设计语言给出了一个作战仿真训练系统的运用实例, 结果表明, 该方案满足作战仿真训练系统的实时性、准确性和扩展性要求。
鱼雷攻击; 自导方式; 外弹道; 作战仿真
0 引言
作为一个技术密集、功能设备较多、操作战位分散、相互协同要求高的水下作战单元——潜艇, 其战斗力的形成和提高, 在很大程度上取决于日常训练。而岸港训练由于具有安全、经济、有效的诸多特点, 又成为部队日常训练的主要方式和关键环节。因此, 按照潜艇装备实际和特点, 以及其作战的客观环境, 建造能够体现现代装备技术水平和符合作战使用客观背景的仿真训练装备是保证新装备快速形成战斗力的重要途径。
随着技术的发展和多年的开发实践, 按照装备的外形尺度乃至其功能, 如潜艇作战系统内部的指挥关系、所具备的攻防手段、控制关系、主要设备及操作界面等, 构建一型作战仿真训练系统并不存在技术难题, 但是, 能否达成逼真的训练效果, 则完全取决于作战背景、水文条件, 特别是武器性能的仿真程度。为满足作战训练的需要, 文中提出了数字鱼雷的概念, 构建了数字鱼雷的技术方案, 并应用于作战仿真训练系统中。
1 数字鱼雷概念及其军事应用
所谓数字鱼雷, 是指利用数字仿真技术模拟鱼雷的作战功能、技术性能, 及其与发射平台武器系统交互关系和弹道过程的软件集合体。
显而易见, 这种数字鱼雷以其构造灵活、组装简单的特点, 作为构成潜艇鱼雷武器系统的一个仿真部件, 可以按照应用需要, 构成规模大小不等的各种具有实物或纯虚拟的模拟仿真系统。以此可应用于两方面的主要目的。
一是作为作战仿真系统的组成部分, 用于描述鱼雷武器的使用过程和攻击结果。即应用于包括潜艇鱼雷武器系统在内的作战仿真系统中, 按照用户的需要, 在一定作战背景条件下, 完成给定鱼雷武器的作战效能评估、作战使用方法研究和岸港条件下模拟作战训练等。
二是作为潜艇武器装备的组成部分, 用于海上攻击训练或者鱼雷武器系统日常保养和维修过程的技术检查和调试。其中, 前者是利用潜艇作战系统的实装资源, 解决海上鱼雷攻击的模拟训练问题, 即在海上训练中, 以数字鱼雷代替真实鱼雷, 在不用实际发射鱼雷的条件下模拟潜艇鱼雷攻击过程, 从而保证艇员在真实的岗位和设备上、无需顾及海区客观条件和捞雷风险的环境中逼真地进行鱼雷攻击训练; 而后者则是作为鱼雷武器系统日常维护的保障条件, 在艇上武器系统检修和各层次修理过程中为艇员或工程技术人员提供鱼雷武器通道的动态调试环境。
2 数字鱼雷基本技术要求
不难看出, 上述应用, 特别是用于鱼雷武器作战效能评估、作战使用方法研究和模拟作战训练, 通常都是一个实时性很强、随机因素很多、战术情况多变的时间过程。因此, 真实地描述鱼雷武器的使用过程和弹道性能是保证这种应用最重要的前提。否则, 不仅不能保证研究或训练的目的性, 而且还可能造成研究结果的偏离, 甚至对作战训练使用方法产生误导[1]。
随着鱼雷技术的进步, 现代鱼雷的功能和性能得到了极大提高, 鱼雷和其武器系统的相互依赖关系也越来越密切。这一切不仅使鱼雷自身的控制关系以及鱼雷与其武器系统之间的交互关系变得越来越复杂, 而且使得体现其作战性能的弹道过程也变得越来越复杂。所以, 为了满足上述应用目的, 数字鱼雷必须满足以下基本技术要求。
1) 计算速度要求。依据不同的应用目的, 数字鱼雷完成一次仿真计算所需要的时间应有不同的要求, 如果用于统计仿真则其速度越快越能提高效率; 如果用于攻击训练仿真, 则应能够按照自然时间完成真实鱼雷的动作进程。所以, 计算速度至少应能满足实时系统的要求。如果不能保证鱼雷与艇上武器系统的实时交互, 以及弹道仿真精度的条件下实时完成计算任务, 就不可能按照自然时间完成作战过程的仿真。
2) 交互性要求。应能按照发射平台的攻击过程完整地模拟鱼雷与其武器系统相互之间的控制关系和信息传递过程。从本质上来说, 艇上武器系统与鱼雷的交互过程就是武器系统对鱼雷的控制过程, 所以从鱼雷攻击开始, 就要按鱼雷自身固有的功能和性能, 以及鱼雷与艇上武器系统的信息协议执行诸如鱼雷各系统自检、惯导调平、参数预设定、线导遥控信息接收及执行等交互过程, 并按协议在这些交互过程中回复相关应答信息和遥测信息。
3) 弹道过程逼真性要求。应能够按照给定鱼雷的技术特点、发射平台的控制、作战使用环境、目标特性、战术态势和搜索跟踪程序, 描述鱼雷的弹道过程。鱼雷弹道是其作战性能的具体体现,所以能否按照鱼雷的技术实际描述鱼雷的弹道过程是关乎这种数字鱼雷能否满足应用的关键所在。
上述要求可以看出, 采用以往直航鱼雷或各种声自导鱼雷的仿真方法很难完整地描述现代鱼雷的功能和性能。而且, 仅仅依靠只具有仿真知识的人员, 而没有鱼雷研制的工程技术人员的参与开发, 也不可能“建造”出与实际型号在功能和性能上相一致的数字鱼雷。
3 鱼雷弹道模型
为了胜任现代作战任务, 尽管现代鱼雷通常集多种制导方式于一身, 使得其弹道过程远比以往鱼雷复杂, 但除了性能参数(鱼雷的速度、自导探测能力和机动旋回能力)的差异之外, 各型鱼雷的弹道过程无外乎以下几种主要模型及其组合。
1) 初始机动弹道模型[2]。描述鱼雷发射出管到建立起稳定的运动状态时间之内的航行过程。该过程鱼雷的弹道取决于发射管的性能、鱼雷自身动力和发射水域的水动力学特性等。
2) 自控驾驶弹道模型[2]。鱼雷完成初始机动后, 按照发射系统预先设定的航向, 完成一次转角, 到直航终了的整个过程。该过程鱼雷的弹道轨迹主要取决于发射系统的预先设定和鱼雷的机动性能。对于直航鱼雷来说是鱼雷开始一次转角到鱼雷命中目标或航程耗尽的整个过程; 对于自导鱼雷来说是开始一次转角到鱼雷自导开机的过程; 对于线导鱼雷则是开始一次转角到鱼雷第1次接受线导遥控指令时间内的过程。
3) 声自导弹道模型[2]。具有声自导导引方式的鱼雷, 在探测到目标以后转入自导阶段。在自导阶段鱼雷的自导系统按照一定的导引规律, 以程序的方式控制鱼雷跟踪目标, 并且在鱼雷丢失目标时以确定的再搜索方式搜索和跟踪目标, 直到鱼雷命中目标或航程耗尽。
4) 尾流自导弹道模型[2]。末段尾流自导鱼雷,在探测到目标尾流后转入尾流自导阶段。在跟踪目标尾流的过程中, 依据自导装置检测尾流的机理不同, 又可分为单波束和三波束制导, 其弹道过程由程序确定。
5) 线导导引弹道模型[3]。线导导引段是鱼雷出管并且与平台发射系统建立起信息联系之后,由发射平台对鱼雷的遥测与控制过程。在这一过程中, 发射平台按照一定的导引方法对鱼雷实施变深、变速和变向控制。可以看出, 在这一过程中鱼雷的弹道是由发射平台控制的。
6) 反水声对抗弹道模型[4]。当鱼雷发现并识别出所跟踪的目标是被攻击目标所释放的水声对抗器材时, 鱼雷将按照程序弹道进行反水声对抗的战术机动与搜索, 鱼雷的弹道轨迹或鱼雷的反水声对抗方式取决于水声对抗器材的类型、目标态势等。
7) 其他功能弹道模型[2]。为了应对各种特殊情况, 潜射鱼雷除了配备接近、搜索、跟踪目标的弹道之外, 还具备诸如保护发射平台安全等应对特殊情况的功能弹道。
4 外部控制模型及接口关系
潜射鱼雷的发射控制信息主要来源于声呐这一目标定位精度较低的水声探测器材, 正是原始信息的不准确性, 使得鱼雷发现目标存在很大的随机性。此外, 目标的位置、运动状态和作战海域的水文条件都对鱼雷的探测、判断, 乃至跟踪和命中产生重要影响。这些都是数字鱼雷计算自导作用距离、判断是否发现或丢失目标, 以及鱼雷弹道过程控制的重要依据。所以, 作为数字鱼雷的输入, 外部的仿真系统应建立相应的模型,并通过软件接口给予提供, 如图1之虚线方框内。

图1 数字鱼雷仿真模型的基本框架Fig. 1 Frame of digital torpedo simulation model
1) 发射控制进程模型[5]。按照鱼雷攻击的自然过程, 描述武器系统对鱼雷的控制。包括从鱼雷上电、使用方式和自导方式确定、预设定参数装订、线导遥控等, 体现的是艇上鱼雷武器系统对鱼雷的控制过程和控制方法。
2) 装订参数模型[2]。为了提供鱼雷弹道的控制条件, 作战仿真时, 不仅要按照装备实际提供装订参数, 而且这些参数还存在符合潜艇计算目标运动参数和射击参数误差分布规律的一定量的随机误差。
3) 战场水文环境模型[2]。作战海区的水文环境是影响鱼雷自导性能的重要因素, 通常这种影响的主要表现是鱼雷自导探测距离的不确定性,最终体现在鱼雷弹道轨迹的不确定。
4) 目标及其运动状态模型[6]。目标舰艇的初始状态、发现鱼雷的距离, 鱼雷接近目标过程中相对于目标的位置, 以及目标速度及其机动对抗措施都对鱼雷的探测和弹道控制产生重要影响。
5 数字鱼雷的技术方案构建
由鱼雷的弹道模型可以看出, 在需要描述多型鱼雷, 而且每型鱼雷又具有多种制导方式的仿真环境中, 如果采用过去那种只针对某一特定型号进行仿真, 其仿真软件将是庞大而复杂的, 远不能胜任多型鱼雷或同型鱼雷多种制导方式的应用环境。
为了实现通用性的目的, 在内部结构上必须采用模块化设计的技术方法。为此, 可将实现鱼雷不同功能的代码分别做成子模块, 然后把这些子模块封装一起构成数字鱼雷, 如图1之实线的方框内。
数字鱼雷作为作战仿真系统的重要组成部分之一, 其运行的时机取决于训练中鱼雷是否发射,所以由仿真训练系统调用。为了满足描述不同型号鱼雷的需要, 数字鱼雷应包含鱼雷性能参数库和弹道模型库两个主要部分。
1) 鱼雷性能参数库的构建。鱼雷性能参数库中以数据的形式存储了需要仿真的鱼雷性能参数资料, 如鱼雷速度、自导探测性能和航程,以及特殊弹道的控制策略等。为了便于引用可采用关系数据库, 以使鱼雷的性能参数与其型号相关联。
2) 弹道模型库的构建。弹道模型库封装了鱼雷各阶段的弹道模型, 其本质是用于解算给定条件下鱼雷的弹道轨迹和运动参数(瞬时速度和航向), 所以是弹道仿真的关键部分。
其他附属模型用于描述鱼雷弹道的相关附属模型包括鱼雷控制系统精度模型, 描述了鱼雷航行过程的各种误差, 通常是鱼雷型号所固有的。
仿真过程中, 仿真训练系统在鱼雷发射后,只需通过传递所发射鱼雷型号、自导方式和战术态势调用数字鱼雷。由数字鱼雷从模型库中分别调用相应的子模块即可达成型号、参数和弹道模型的统一, 进而在具有针对性的“作战”条件下完成仿真过程模拟和计算。
6 作战仿真应用实例
采用面向对象的程序设计方法, 为作战仿真功能的集成奠定了基础。在具体编程时, 利用Visual C++面向对象设计语言, 各个较大的模型都是以类的形式进行设计, 如目标和潜艇的战术行为等。在这些专有类的基础上, 加上一些Visual C++中的用于生成人机界面的通用类, 构成整个仿真程序。图2给出了作战仿真训练系统中各专有类之间的逻辑关系和仿真流程。可以看出, 数字鱼雷作为这种应用系统的一个部件, 无需开发者对其内部的仿真问题做任何工作。

图2 作战仿真系统流程Fig. 2 Flow chart of operational simulation system
在系统运行过程中, 启动数字鱼雷的时机是由受训者的攻击决策结果和鱼雷发射后的时间确定的, 作为仿真系统只需在鱼雷发射时向数字鱼雷提供所发射鱼雷的类型、使用方式和预设定参数, 随后按照系统的仿真周期, 以当前时间、作战态势和水文条件, 周期地启动数字鱼雷, 直到鱼雷命中目标或航程耗尽。
图3给出了线导加尾流自导鱼雷弹道仿真的局部轨迹, 包括线导导引弹道、自导自适应弹道和三波束尾流自导弹道。仿真软件不仅满足动态仿真系统的实时性要求, 而且鱼雷弹道仿真精度高、各阶段衔接良好。
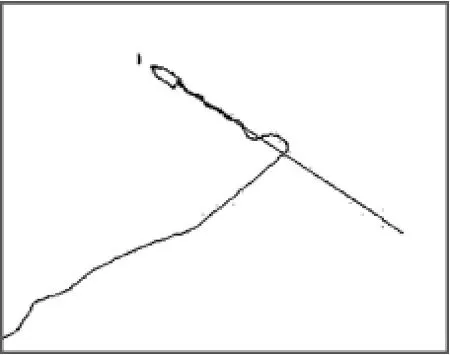
图3 线导导引和尾流自导跟踪的仿真示意图Fig. 3 Simulation example schematic of wire guidance and wake homing tracking
7 结束语
无论在技术上, 还是在战术使用上, 鱼雷武器弹道仿真都是一个十分复杂的系统工程问题。目前, 针对鱼雷功能研究的弹道仿真模型相对较多, 而用于战术仿真、特别是复杂对抗条件下的鱼雷弹道仿真模型, 不仅过少, 而且过于简单,以至于难以体现作战过程的实际。因此, 在用于作战使用研究, 或者战术训练目的时, 将难以达到贴近实际的效果。文中提出数字鱼雷及其技术方案的目的也就在于对这方面工作的探索, 所研究的方法满足了鱼雷型号多、制导方式复杂条件下, 作战仿真训练系统对实时性、准确性和扩展性的要求。
[1] 李本昌. 潜艇作战仿真训练系统的功能需求与技术实现[J]. 军事运筹与系统工程, 2002, 61(3): 17-20.
Li Ben-Chang. The Function Requirement and Technical Implement of Submarine Combat Simulation Training System[J]. Military Operations Research and Systems Engineering, 2002, 61(3): 17-20.
[2] 李本昌. 潜射鱼雷作战运用理论与工程[M]. 北京: 国防工业出版社, 2014.
[3] 李本昌. 线导鱼雷的速制及其作战运用[J]. 鱼雷技术,2009, 17(4): 74-76.
Li Ben-Chang. Multispeed Application of Wire-guided Torpedo[J]. Torpedo Technology, 2009, 39(4): 74-76.
[4] 谢飞跃. 鱼雷对抗假目标的再搜索弹道研究[J]. 鱼雷技术, 2003, 11(3): 38-40.
Xie Fei-Yue. A Study of Torpedo′s Re-attacking Trajectory Countering False Targets[J]. Torpedo Technology, 2003, 11(3): 38-40.
[5] 李本昌. 潜射鱼雷射击控制方式及有关问题[J]. 火力与指挥控制, 2012, 37(11): 1-3.
Li Ben-Chang. Submarine Torpedo Weapon Firing Control Mode and Relevant Problems[J]. Fire Control & Command Control, 2012, 37(11): 1-3.
[6] 李本昌, 杨辉, 潜射鱼雷的自导方式及机动对抗条件下的运用[J]. 指挥控制与仿真, 2015, 37(1): 1-3.
Li Ben-Chang, Yang Hui. Homing Mode and Application in Counter Condition of Sub-Launch Torpedoes[J]. Command Control and Simuliation, 2015, 37(1): 1-3.
(责任编辑: 许妍)
Military Application and Technical Scheme of Digital Torpedo
LI Ben-Chang,LI Yuan
(Research Centre of Submarine Operation Software, Navy Submarine Academy, Qingdao 266042, China)
According to the needs for operational simulation and military simulation training, this paper proposes a concept of a digital torpedo and its technical requirements by considering the complexity of a modern torpedo and its interaction with weapon system, and builds a torpedo trajectory model and an external control model with interfaces. Moreover, the technical scheme of a digital torpedo is designed by adopting the external trajectory simulation method, in which performance parameter is related to torpedo type, and trajectory stages are related to simulation process and tactical situation. In addition, an application example of an operational simulation training system is programmed with Visual C++. The result shows that the scheme can meet the requirements of real-time, accuracy and expansibility for an operational simulation training system.
torpedo attack; homing mode; external trajectory; operational simulation
TJ630; TP391
A
1673-1948(2015)06-0465-05
10.11993/j.issn.1673-1948.2015.06.014
2015-07-30;
2015-10-14.
李本昌(1955-), 男, 教授, 研究方向为潜艇作战系统和武器运用.
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
小哥白尼(军事科学)(2021年8期)2021-11-22
智能计算机与应用(2021年5期)2021-10-05
数字海洋与水下攻防(2020年5期)2021-01-04
小哥白尼(军事科学)(2020年8期)2020-05-22
舰船电子对抗(2019年2期)2019-05-23
电子制作(2019年7期)2019-04-25
军事运筹与系统工程(2017年1期)2017-07-31
水下无人系统学报(2016年3期)2016-10-13
制导与引信(2016年3期)2016-03-20
