
小波滤噪对多光谱遥感水深反演精度的影响分析
2015-11-28 11:08张靖宇
海洋科学进展 2015年3期
张靖宇,马 毅*,田 震,2,梁 建
(1.国家海洋局 第一海洋研究所,山东 青岛266061;2.山东科技大学 测绘科学与工程学院,山东 青岛266590)
水深是海洋环境重要的要素。不论是航海运输,还是海洋工程,都需要有详实准确的水深信息支撑。传统的水深测量具有测量精度高的优势,但费时费力,经费消耗大。遥感具有同步大面积覆盖、时空分辨率高的特点,已成为水深测量的一种有效方式。
近年来的水深遥感研究工作主要集中在反演模型研究、反演模型比较和反演应用等方面。对于水深遥感反演模型研究,Su等[1]提出了一种自适应地理反演模型,该模型在复杂沿海水域的水深反演精度有明显提高;Hedley等[2]发展了针对哨兵2号的新模型,并分析评价了其水深、底质探测能力。在反演模型比较方面,Gholamalifard等[3]用3种不同的反演模型在里海东南部海岸带开展了水深遥感反演实验,发现神经网络模型较蓝光和红光波段的单波段模型、主成分分析模型更为理想。在水深反演应用方面,相关学者分别应用不同模型对南沙群岛中业岛、西沙群岛的广金岛和琛航岛、广东雷州半岛周边的水深进行了反演[4-6]。可以看出,遥感水深反演模型日益丰富,且开始关注海岛周边海域。需要指出的是,海面上波浪破碎(即白冠),在光学遥感影像上形成光斑,光斑的强反射会破坏水体光辐射的信息,导致影像像元的辐亮度畸变,是影响光学遥感水深反演的主要噪声。传统的遥感影像滤噪方法主要有均值滤波和中值滤波,都曾用于水深遥感反演的影像预处理中,前者常用于抑制高斯噪声,但有噪声传播的问题,后者对消除椒盐噪声表现较好,但易造成影像灰度的不连续性。小波变换是一种影像多尺度分离算法,其滤噪功能强,不仅能去除光斑噪声,而且可以分离影像中小尺度的海浪信息,这有利于水深遥感信息的提取。虽然小波变换的理论研究日趋成熟,并在众多领域中得到了广泛应用,但小波滤噪对多光谱遥感水深反演影响的相关研究还没有受到关注;此外,任何滤噪方法在去噪的同时,都会或多或少影响目标信息,这就需要开展有针对性的研究,即小波滤噪对多光谱遥感水深反演精度的影响分析。
本文以西沙群岛的东岛为实验区,利用高空间分辨率WorldView-2多光谱遥感影像开展小波滤噪,应用三波段对数线性模型实现东岛礁盘周围0~20m深度海域的水深反演,并从如下3个方面讨论了小波滤噪对水深反演精度的影响:原始影像与一级至五级小波滤噪后影像的水深总体反演精度比较分析;0~5,5~10和10~20m三个水深段分别开展的原始影像与一级至五级小波滤噪后影像反演精度的比较分析;小波滤噪与传统的均值和中值滤噪方法对反演精度影响的比较分析。
1 数据与方法
1.1 数据与处理
东岛地处中国西沙群岛东部的宣德群岛,位于一长形弧状的巨大礁盘上。距岸线几百米范围内的水深均小于20m,层次性良好且变化平缓。此处海水清澈,遥感影像辐亮度受水质和环境等因素的影响较小,适合开展水深反演实验。
本文选用数据为2012-05-02T11:22(北京时间)获取的 WorldView-2多光谱影像,其多光谱8个波段的空间分辨率为2m,相关参数如表1所示。图1是实验区域WorldView-2影像的彩色合成图像。
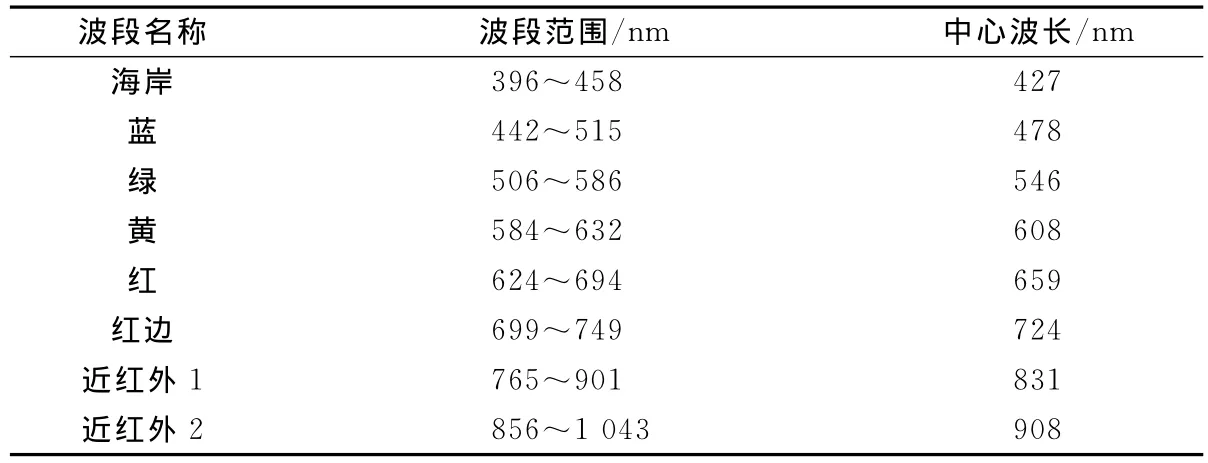
表1 WorldView-2多光谱影像的波段设置Table 1 Bands configuration of WorldView-2multi-spectral imagery
选用2010年现场测量的水深数据作为水深反演模型的控制和验证信息,水深点共11 682个,为了充分研究滤噪对海岛周边水深多光谱遥感反演精度的影响,未对点数进行删减。上述水深实测点在东岛礁盘和0~5,5~10和10~20m三个水深段上均匀分布,其水深值范围是0~20m。本文选其中的1/3作为水深遥感反演模型的控制点,其余作为检查点。
数据处理包括几何校正、辐亮度转换、大气校正和潮汐校正。利用现场采集的像控点和WorldView-2影像RPC参数开展几何校正,校正精度优于1个像元。辐亮度转换是将遥感影像的灰度值转换为传感器的入瞳辐射亮度值,World-View-2数据的辐亮度转换分为两步:先将像元DN值转换为波段积分辐射亮度,然后计算光谱辐射亮度,式(1)用于计算波段积分辐射亮度:


图1 实验区域彩色合成影像图(R5G3B2)Fig.1 Color composite image of the study area(R:Band 5;G:Band 3;B:Band 2)
计算光谱辐射亮度值的公式如式(2):

式中,Li是波段积分辐射亮度;absCalFactor为绝对定标因子;L是光谱辐射亮度值;Δλ为波段有效宽度。
水体遥感中,传感器接收的辐射包括水底反射光、悬浮物反射光、水面反射光和天空散射光。大气校正就是消除遥感影像中由大气散射引起的辐射误差的处理过程。本文利用遥感影像处理软件ENVI提供的FLAASH模块进行大气校正,最终得到表观反射率数据。
海水受天体引潮力作用产生周期性运动,垂向涨落为潮汐,其变化有一定的时间规律。根据影像获取时间,查找《2012年潮汐表(第三册)台湾海峡至北部湾》[7]对应时刻的潮汐信息,以平均海面下95cm为潮高基准面,确定影像获取时西沙群岛岛礁周围潮高是105.5cm。利用该值对水深控制点和水深检查点进行潮汐校正。
1.2 小波变换方法
对于水深遥感反演,影像中的太阳耀斑、波浪破碎产生的白冠、海面漂浮物体等都是噪声,应采用滤噪方法去除。小波变换具有时频局域化的特点[8],考虑到其强大的滤噪功能,本文利用 Mallat小波算法,对WorldView-2多光谱遥感影像进行多尺度分解。图2以实验区第三波段图像为例,展示了图像小波的分解与重构算法流程。该算法首先通过一组分解滤波器对原始影像滤波,分解出长宽减半的4个分量,包括低频分量、水平高频细节分量、垂直高频细节分量和对角方向高频细节分量。其中,低频分量体现了影像轮廓,高频分量体现了影像细节和噪声。之后,保留原始影像低频分量信息,将高频分量赋0值重构影像,该重构影像就是一级小波滤噪后的影像。重复上述步骤,得到二级至五级的小波变换影像。

图2 图像小波的分解与重构算法流程Fig.2 Flowchart of wavelet-based image decomposition and construction algorithm
1.3 水深反演方法
文中水深反演方法采用Lyzenga[9]提出的多波段模型。选择蓝、绿、红这3个波段,其水深反演公式如式(3)所示:

式中,z为水深;A0和Ai(i=1,2,3)为待定系数;Xi=Ln(ρi-ρsi);ρi是第i波段反射率数据;ρsi是该波段深水处的反射率。多波段模型考虑了底质等方面的因素,综合了多个波段的水深信息,在水深反演精度上优于单波段模型;蓝、绿、红波段又位于水体反射率较强的区间范围内,对不同深度的水深信息相对红外等其他波段更为敏感,适于水体遥感探测,所以采用蓝、绿、红三波段对数线性模型反演水深。
2 结果与分析
2.1 原始影像与小波滤噪后影像的水深总体反演精度比较
原始影像及一级至五级小波滤噪后影像的水深反演误差见图3。其中,原始影像、一级至五级小波滤噪后影像水深反演在检查点处的平均相对误差分别为32.6%,28.4%,28.0%,27.5%,29.3%和29.2%,原始影像和一级小波滤噪影像水深反演的平均绝对误差分别为1.5和1.3m,二级及更高尺度小波滤噪的均为1.1m。比较小波滤噪前后影像的水深反演结果发现:小波噪声滤除后影像较原始影像水深反演精度高,且前三级滤噪影像水深反演精度随着滤噪尺度的增加而升高,反演精度最好的是三级小波滤噪的影像,较原始影像提高了5%;后续小波滤噪影像的水深反演精度均有下降,其中四级小波滤噪影像仅比原始影像反演精度高,五级小波滤噪影像的反演精度相比四级略有升高,但比前三级小波滤噪影像的反演精度低。

图3 小波滤噪前后影像水深反演误差比较Fig.3 Comparison of the inversion accuracies before and after wavelet denoising
小波滤噪前后水深检查点处实测水深与反演水深的散点图如图4所示,图中红线为1∶1参考线,绿线为拟合线,并标示了相关系数r。根据散点图,所有影像都呈现出较为明显的线性相关性。原始图像的r值最小,此后随小波滤噪尺度增加,r值不断增大,至三级小波后保持不变。其中,除原始影像反演的数据点较为松散地分布在拟合线的两侧外,从一级至五级小波滤噪影像数据点的分布逐渐向拟合线集中。原始影像的散点图中残差较大的数据点在经过小波滤噪后有所减少。小波滤噪影像的水深反演结果整体较原始影像的相关性更强,而且这种相关性趋势在深度大于5m的数据点上表现更为明显。

图4 小波滤噪前后影像水深反演检查点散点图Fig.4 Scatter plots of the check points before and after wavelet denoising
2.2 原始影像与一级至五级小波滤噪后影像在不同水深段的水深反演精度比较
以5和10m为间断点将检查点分为3个水深段,每个水深段的误差分布情况见表2。随着深度增加,小波滤噪前后影像的平均相对误差均减小,平均绝对误差则先减小后增大。在0~5m水深段内,反演结果精度普遍较低,一级至三级小波滤噪后影像的水深反演精度均优于原始影像,四级、五级小波滤噪影像反演的平均相对误差与原始影像相差不大。随着滤噪尺度的增加,平均相对误差呈先减小后增大的趋势,平均绝对误差则先减小后保持不变,其中,一级小波滤噪影像反演的平均相对误差最小,为76.5%,平均绝对误差也最小,为1.2m。在5~10m水深段内,一级至三级小波滤噪影像反演的平均相对误差随滤噪尺度增加而减小,四级、五级小波滤噪影像反演的平均相对误差则随滤噪尺度增加而增大,平均绝对误差趋势与0~5m水深段相同,其减小到一定程度后保持稳定,其中,三级小波滤噪影像反演的平均相对误差最小,相比原始影像同水深段的反演精度提高了约5%,为13.2%,二级至五级小波滤噪影像的反演平均绝对误差最小,均为1.0m。10~20m水深段处,小波滤噪影像反演的平均相对误差按小波滤噪尺度增加先减少,当尺度增加到四级小波滤噪时最小,其值为7.2%,五级小波滤噪后反演结果的平均相对误差又有小幅上升;平均绝对误差则从原始影像的1.8m减小到三级小波滤噪影像的1.1m,之后不再继续增减。

表2 小波滤噪前后影像在不同水深段的反演精度比较Table 2 Comparison of inversion accuracies before and after wavelet denoising
综合2.1节和2.2节的结果,虽然四级和五级小波滤噪在0~5m水深段内的反演精度远不如前三级小波,但平均绝对误差均为1.2m,平均相对误差与前三级相比,最多也就相差约11%;在5~10和10~20m段,四级和五级小波滤噪影像的反演精度虽优于一级小波,但由于0~5m浅水区的反演精度差,导致其水深反演的整体精度较一级至三级小波滤噪影像有所降低。
2.3 不同滤噪方法处理影像的水深反演精度比较
用传统滤噪方法——中值滤波和均值滤波处理影像,得到窗口大小为3×3,5×5,7×7,9×9和11×11的中值滤波与均值滤波影像,将其与小波滤噪影像的平均相对误差作比较,分析结果见图5。
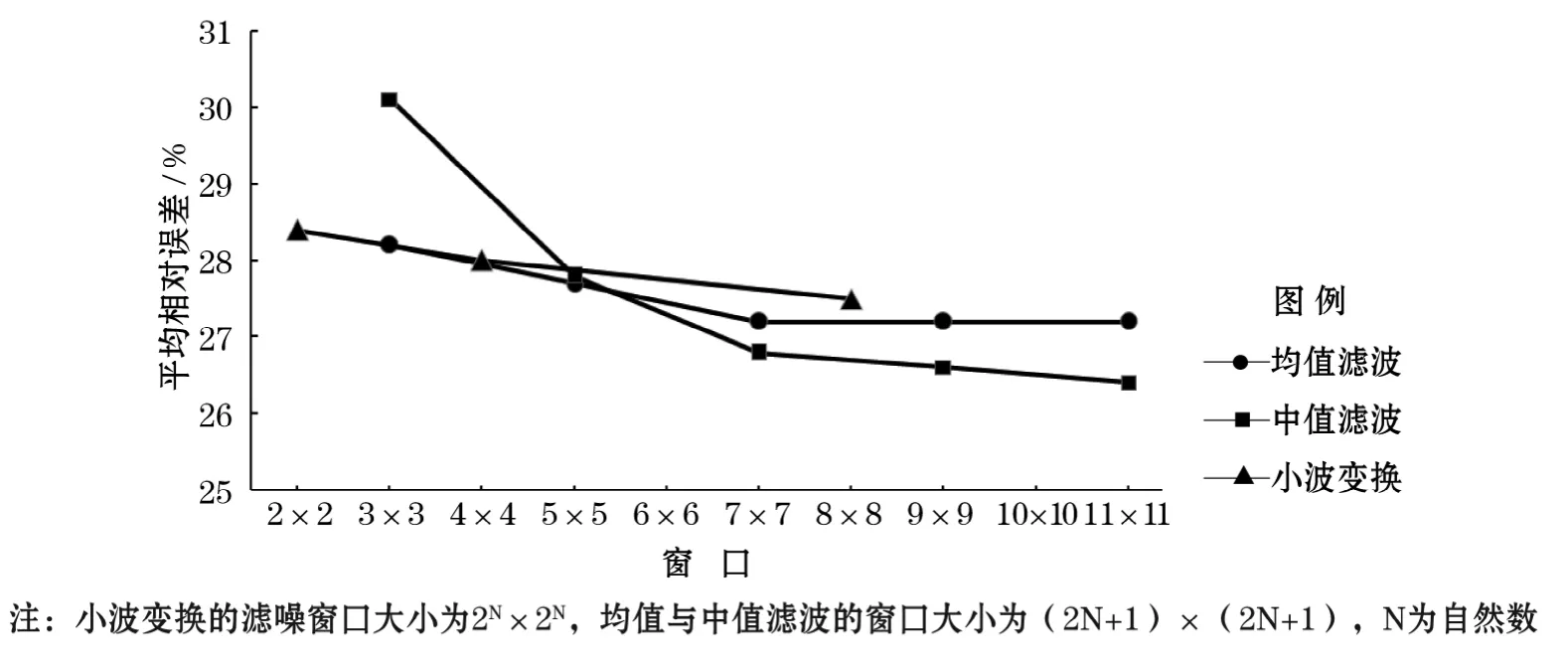
图5 3种滤噪影像在不同窗口水深反演的平均相对误差变化Fig.5 The mean relative error of three denoising images corresponding to different filter windows
通过比较可以发现,中值滤波影像的反演精度随窗口增大而升高,但增幅逐渐减小,实验中,7×7和9×9,11×11窗口的中值滤波反演所得到的最小与最大平均相对误差之间只相差0.4%。均值滤波影像的反演精度也随窗口增大而升高,但提高到一定程度后保持不变。7×7及更大窗口均值滤波影像水深反演的平均相对误差均为27.2%,平均绝对误差均为1.0m。3×3和5×5窗口时,均值滤波较中值滤波表现更好,但随窗口增大,均值滤波的反演精度不如中值滤波提高得明显。7×7及更大窗口的中值滤波影像反演的平均相对误差小于均值滤波。综合比较,发现这两种传统滤波方法都表现出反演精度的提高幅度随着滤波窗口增大而减小的趋势,即并不是窗口越大,反演精度越好,所以,中值滤波与均值滤波对反演精度的改善在一定程度上都是有限的。
一级小波滤噪对影像分辨率的影响相当于2×2窗口大小的滤波处理,并且随级数增大,滤波窗口的大小呈2的指数倍增大,即对于N级小波滤噪而言,其滤波窗口大小为2N×2N。而中值滤波与均值滤波的窗口大小则呈线性变换,其最小的滤噪窗口大小是3×3,且只能为奇数,如3,5,7等。事实上,在对影像进行滤波处理的过程中,窗口的增大会使得像元光谱的保真性发生改变,在去除噪声的同时也会掺杂更多的邻近像元信息,从而影响到反演精度。因为处理维度不同,单纯通过比较数值大小来评价小波变换与中值滤波、均值滤波的滤噪效果不甚妥帖,但仍可看出当窗口较小时,一级和二级小波变换影像的反演精度较好,与均值滤波相似,并优于中值滤波。
所以,小波变换方法既能够在一定程度上起到去除太阳耀斑、波浪破碎等噪声的作用,又能最大限度的保留有效信息,同时还增加了滤噪窗口选择的灵活性,是一种可选的滤噪方法。此外,结合2.1节中的结果发现,当滤波强度增加到一定程度时,其与传统均值、中值滤波方法的反演精度不再大幅提升。也就是说,利用滤噪方法将原始遥感影像处理到合适强度后,再进行反演可得到较为理想的结果,但继续升高滤噪尺度或增大滤波窗口就可能会影响到所需要的目标信息。
3 结论与讨论
3.1 结论
为了探究不同尺度小波滤噪对多光谱遥感水深反演精度的影响,本文选择东岛周边清澈浅海(水深不超过20m)为实验区,基于WorldView-2多光谱遥感影像和蓝、绿、红三波段的对数线性模型,开展了实验区原始影像及一级至五级小波滤噪后影像的水深反演实验,从总体、分水深段和不同滤噪方法处理等三个方面进行反演精度比较。通过分析,发现小波变换作为一种滤噪手段,可以在一定程度上提高多光谱遥感水深反演的精度,具体结论如下:
1)小波噪声滤除后影像较原始影像反演精度要高,且前三级的反演精度随着滤噪尺度增加而升高,四级和五级小波滤噪影像的反演精度较前三级小波滤噪反演结果低。本实验中,对原始遥感影像作三级小波滤噪处理较合适,在此基础上进行水深反演,得到的平均相对误差为27.5%,平均绝对误差为1.1m,分别比原始影像的结果减小了5%和0.4m。
2)随着深度增加,小波滤噪前后影像水深反演的平均相对误差均减小,而平均绝对误差先减小后增大。0~5,5~10和10~20m水深内,反演精度最高的分别是一级、三级和四级小波滤噪影像,呈现出较小尺度小波滤噪适用于浅水区,较大尺度小波滤噪适用于深水区的现象。
3)随着滤波窗口增大,中值滤波与均值滤波影像的水深反演精度提升幅度减小,当窗口较小时,小波滤噪与均值滤波的滤噪效果相似,均优于中值滤波。当滤波强度增加到一定程度时,3种方法的反演精度不再大幅提升。
3.2 讨论
1)本文采用的三波段对数线性模型是具有代表性的经典模型,且选用了对不同深度水深信息相对敏感的蓝、绿、红三个波段,也可以考虑尝试其他模型和波段组合。一级至三级小波滤噪影像在0~5m水深的反演精度虽然比原始影像有显著提高,但精度仍然徘徊在较低值,这是浅水区光学信号受波浪、潮汐和底质综合干扰所导致的。
2)图像滤噪是为了更好地提取水深信息,然而滤噪后影像会有高频信息的损失,且损失程度随滤噪的空间窗口增大而趋于严重。事实上,影像中的高频信息也会有水深的贡献。数字图像均值滤波与中值滤波的最小窗口是3×3,而小波变换可以在更小的窗口(2×2)上开展滤噪,因此小波滤噪可为水深遥感反演提供高频信息损失较少的影像。
(References):
[1]SU H B,LIU H X,WANG L,et al.Geographically adaptive inversion model for improving bathymetric retrieval from satellite multispectral imagery[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(1):465-476.
[2]HEDLEY J,ROELFSEMA C,KOETZ B,et al.Capability of the Sentinel 2mission for tropical coral reef mapping and coral bleaching detection[J].Remote Sensing of Environment,2012,120:145-155.
[3]GHOLAMALIFARD M,KUTSER T,ESMAILI-SARI A,et al.Remotely sensed empirical modeling of bathymetry in the southeastern Caspian Sea[J].Remote Sensing,2013,5(6):2746-2762.
[4]LIU Z.Bathymetry and bottom albedo retrieval using Hyperion:a case study of Thitu Island and reef[J].Chinese Journal of Oceanology& Limnology,2013,31(6):1338-1343.
[5]XU H P,MA Y,LIANG J,et al.Bathymetry inversion based on semi-empirical model and error analysis of different water depth ranges[J].Coastal Engineering,2014,33(1):19-25.许海蓬,马毅,梁建,等.基于半经验模型的水深反演及不同水深范围的误差分析[J].海岸工程,2014,33(1):19-25.
[6]TIAN Z,MA Y,ZHANG J Y,et al.Study on water depth inversion around the island with remote sensing technology based on principal component transform[C]∥Proceedings of 19th conference on remote sensing of China(Vol.3).Beijing:China Astronautic Publishing House,2014:1637-1644.田震,马毅,张靖宇,等.基于主成分变换的海岛周边水深遥感反演研究[C]∥第19届中国遥感大会论文集(下).北京:中国宇航出版社,2014:1637-1644.
[7]THE NATIONAL MARINE INFORMATION CENTER.2012tide tables(Vol.3):from the Taiwan Straits to the Beibu Gulf[M].Beijing:China Ocean Press,2011.国家海洋信息中心.2012年潮汐表(第三册)台湾海峡至北部湾[M].北京:海洋出版社,2011.
[8]LIU G,WANG L X,DONG Y,et al.MATLAB digital image processing[M].Beijing:China Machine Press,2010.刘刚,王立香,董延,等.MATLAB数字影像处理[M].北京:机械工业出版社,2010.
[9]LYZENGA D R.Passive remote sensing techniques for mapping water depth and bottom features[J].Applied Optics,1978,17(3):379-383.
猜你喜欢
河北水利(2022年10期)2022-12-29
海洋通报(2022年4期)2022-10-10
海洋信息技术与应用(2022年1期)2022-06-05
科技风(2021年19期)2021-09-07
电子制作(2019年13期)2020-01-14
电子制作(2018年2期)2018-04-18
制造技术与机床(2017年10期)2017-11-28
制导与引信(2017年3期)2017-11-02
高师理科学刊(2016年8期)2016-06-15
西藏科技(2015年4期)2015-09-26
