基于EKF轮胎侧向力估计的AFS和EPS集成控制
2016-01-15 02:09周兵,徐蒙,范璐
振动与冲击 2015年11期
周 兵,徐 蒙,范 璐
(湖南大学汽车车身先进设计制造国家重点实验室,长沙 410082)
第一作者周兵男,博士,副教授,1972年生
基于EKF轮胎侧向力估计的AFS和EPS集成控制
周兵,徐蒙,范璐
(湖南大学汽车车身先进设计制造国家重点实验室,长沙410082)
摘要:对融合了主动前轮转向的电动助力转向系统,主动转向引入的附加转角使得轮胎侧向力发生突变,从而导致转向盘力矩会发生突变。虽然轮胎力不易直接测量,但是扩展卡尔曼滤波算法可以实现对非线性轮胎力的估计,为解决转向盘力矩突变找到实现方法。建立了非线性车辆数学模型,并构建基于扩展卡尔曼滤波算法的轮胎侧向力观测器,根据得到的轮胎侧向力的估计值对转向盘力矩突变进行补偿,实现了车辆状态估计与车辆控制的结合。在MATLAB/Simulink里的仿真分析验证了控制策略的有效性。
关键词:主动前轮转向;电动助力转向;集成控制;扩展卡尔曼滤波观测器;非线性轮胎侧向力
基金项目:国家自然科学基金资助项目(51275162);吉林大学汽车仿真与控制国家重点实验室开放基金(20121109)
收稿日期:2014-04-23修改稿收到日期:2014-05-20
通信作者徐蒙男,硕士生,1989年生
中图分类号:U461
文献标志码:A
DOI:10.13465/j.cnki.jvs.2015.11.017
Abstract:In the integrated system of electric power steering (EPS) and active front steering (AFS), the additional front wheel rotating angle generated by AFS gives rise to the change of tyre lateral force, it leads to the change of steering wheel torque finally. Although the tyre force is hard to be measured directly, it can be estimated using the extended Kalman filtering (EKF) algorithm. This method can solve the problem of steering wheel torque change. Here, a vehicle nonlinear mathematical model was presented and a nonlinear tyre lateral force estimator was also established based on EKF. The estimated tyre lateral force was used to compensate the abrupt change of steering wheel torque and to realize the combination of vehicle state estimation and vehicle control. The simulation analysis with MATLAB/Simulink verified the effectiveness of the proposed control strategy.
Integrated control for AFS and EPS with EKF estimation of lateral force
ZHOUBing,XUMeng,FANLu(State Key Laboratory of Advanced Design and Manufacture for Vehicle Body, Hunan University, Changsha 410082, China)
Key words:active front steering (AFS); electric power steering (EPS); integrated control; EKF observer; nonlinear type lateral force
根据汽车转向系统的力矩传递特性,电动助力转向(Electric Power Steering,EPS)系统中驾驶员施加于转向盘的力矩,与电动助力电机提供的助力力矩共同克服转向阻力矩,控制汽车按照驾驶员转向意图完成转向操作。主动前轮转向(Active Front Steering,AFS)系统通过主动转向电机向转向系统提供附加转角,从而改变了原转向系统的机械转向传动比,同时转向系统的力矩传递特性也会发生改变。在融合主动前轮转向和电动助力转向的系统中,主动转向附加转角干预时,如果助力电机仍然采用原有的助力控制策略,则转向盘力矩会发生突变:若主动转向引起的附加转角与前轮转向角方向相同时,转向盘力矩会增大;反之,转向盘力矩会减小[1]。主动转向引起的转向盘转矩突变会破坏原有电动助力转向系统的良好路感,容易使驾驶员产生误操作,不利于驾驶安全。
近年来,国内外学者针对这一问题开展了大量的研究工作。Minaki等[2-3]通过台架试验证实主动转向干预时转向盘力矩会发生突变,并提出助力电机变助力增益的助力修正控制方法,但是该方法在常规助力增益取值为零时不能对主动干预时转向盘力矩突变进行修正。魏建伟等[1,4]基于二自由度整车模型和扭矩传感器输出,提出了两种助力修正方案,实现了在全车速范围内对由于主动转向附加转角干预时转向盘力矩突变的修正,但是其仿真研究建立的是线性模型,而实际车辆为复杂的非线性模型,所以其针对线性模型提出的助力修正控制策略具有一定的局限性。
为了能够更好地集成主动前轮转向系统和电动助力转向系统,突破上面研究中受常规助力增益和线性分析局限性的限制,在全车速范围内从非线性角度解决主动前轮转向干预时转向盘力矩突变的问题,本文把转向盘力矩突变根源即前轮转向轮胎侧向力的突变作为突破点提出一种新的解决方法。根据扩展卡尔曼滤波(Extended Kalman Filter,EKF)能够解决非线性系统问题的特点,构造非线性轮胎侧向力观测器,根据轮胎侧向力估计值制定前馈助力修正控制策略,解决转向盘力矩突变,提高车辆操纵稳定性和驾驶安全性。
1系统结构原理
融合主动转向功能的电动助力转向系统的结构(见图1)。

图1 融合主动转向功能的EPS系统Fig.1 The EPS integrated with active steeing function
该系统是在传统电动助力系统的基础上,增加了一个主动转向电机和一套双排行星轮系。现有两种AFS和EPS在转向系中的布置方案。方案一,将EPS置于AFS和方向盘之间,EPS距离方向盘较近,因此该方案的优点是EPS能快速对转向系统提供力矩补偿。方案二,将主动转向电机置于助力电机和方向盘之间,当地面反馈的力作用到转向系统后,一部分将由EPS助力电机提供的助力力矩克服抵消,因此能传递给AFS转置作用力变小,由于所受外界载荷不大,故不易损坏行星齿轮转向机构,并能获得AFS转向电机的良好跟随性,有利于提高车辆稳定性。综合比较上述两个方案特点,本文选择方案二。
融合主动转向的电动助力转向系统角位移和力矩传递特性见图2。由图2可知,前轮主动转向电机根据车辆稳定性控制和转向系变传动比控制策产生的附加转角θac,经过减速机构传递给双排行星轮系,通过双排行星轮系与转向盘转角θsw进行叠加,从而改变了转向系统的角位移传递特性,提高车辆的操纵稳定性。电动助力电机根据车速v和扭矩传感器测得的扭矩Ts根据常规助力增益map图共同决策常规助力力矩Tm;同时对车辆前轮的侧向力进行估计,通过前馈助力修正模块决策助力修正力矩ΔTm。将这两个力矩叠加后通过助力电机作用在转向轴上,改变转向系统的力矩传递特性,减轻驾驶员的操纵负担,使驾驶员得到充足的路面信息。

图2 转向系统角位移和力矩传递特性Fig.2 The transfer characteristics of angular displacement and torque for steering system
2系统数学模型
2.1整车模型
整车建模采用2自由度非线性模型。假设车辆做纯转向运动。由Y轴方向和绕Z轴方向受力分析得[5]
(1)
Fyf=Fyfl+Fyfr
Fyr=Fyrl+Fyrr
式中:m为整车质量;v为纵向车速;β为质心侧偏角;ωr为横摆角速度;Fyf为车辆前轴侧向力;Fyr为车辆后轴侧向力;Fyfl、Fyfr、Fyrl、Fyrr分别为左前轮、右前轮、左后轮和右后轮侧偏力;δf为前轮转角;Iz为绕Z轴的转动惯量;a为前轴至质心距离;b为后轴至质心距离。
2.2轮胎模型
车轮采用半经验的魔术公式轮胎模型。假设各轮上附着系数相同,其公式为[6]
Fy=Dsin{Carctan[BX-E(BX-
arctan(BX))]}
(2)
式中:曲线形状因子C=1.3;峰值因子D=a1Fz2+a2Fz;侧向力零点处的侧向刚度BCD=a3sin[a4arctan(a5Fz)];刚度因子B=BCD/(CD);曲线曲率因子E=a6Fz2+a7Fz+a8;X为车轮侧偏角。a1,…,a8为台架试验拟合参数(见表1)。

表1 魔术公式拟合系数
计算轮胎侧向力还需要知道轮胎的垂向载荷和侧偏角,因此给出如下公式
(3)
式中:Fzfl、Fzfr、Fzrl、Fzrr分别表示左前轮、右前轮、左后轮、右后轮的垂向载荷;h为车辆质心高度;Df为前轮距;Dr为后轮距;g为重力加速度。
车轮侧偏角的计算公式为
(4)
式中:αf和αr分别为前轮和后轮的侧偏角。
为了描述轮胎的瞬时特性,引入松弛长度来表达轮胎力的瞬时变化。根据松弛长度的概念,侧向力动力学可表达为[7]
(5)
式中:σ为轮胎侧向松弛长度。
2.3转向系模型
转向盘和转向轴模型表示为[8]
(6)
Ts=Kc(θsw-θs)
(7)
式中:Td为转向盘输入力矩;Jc、Bc、Kc分别为转向轴的转动惯量、阻尼系数和刚度系数;θs为上排行星轮系太阳轮的输入转角。
主动转向施加的附加转角通过双排行星轮系叠加于转向盘转角,叠加后的转向轴转角为
θp=θs+Gafsθac
(8)
式中:Gafs为与转向电机相连的减速机构和双排行星轮系的等效减速比。
转向齿轮的动力学方程
(9)
Tm=KaTs
(10)
式中,J和B分别为转向齿轮的转动惯量和阻尼系数;Tr为回正力矩,具体计算方法参见文献[9];G为机械转向系传动比;Ka为助力电机的常规助力增益。
3基于EKF的轮胎侧向力估计
主动转向产生的附加转角使转向轮转角发生改变,这也就改变了轮胎侧向力。轮胎侧向力又影响回正力矩,经反馈导致转向盘力矩发生突变。由此可见,如果能得到轮胎侧向力的值,就可以将其作为解决转向盘力矩突变的依据,制定相应的前馈助力修正控制策略。
在实际中,由于受制造成本和传感器技术等因素的制约,车辆轮胎侧向力是不易直接测量得到的。我们可以通过基于车辆动力学模型的间接观测方法来估计轮胎侧向力。扩展卡尔曼滤波是卡尔曼滤波器应用在非线性系统的一种推广形式,可以用来建立针对具有非线性特征车辆的状态观测器,利用车载传感器直接测量得到的车辆状态参数并结合车辆动力学模型对轮胎侧向力进行估计。以上建立的车辆数学模型具有一定的非线性度,因此可以用来模拟真实车辆。本文采用EKF算法建立车辆轮胎侧向力观测器[10-13]。
由式(1)、式(5)可得非线性系统状态方程为

(11)
系统的测量方程为
y(t)=h(x(t),u(t))+v(t)
(12)
式中,x(t)=[β(t),ωr(t),Fyfl(t),Fyfr(t),Fyrl(t),Fyrr(t)]T为状态变量;y(t)=[ay(t),ωr(t)]T为测量输出;u(t)=δf(t)为控制变量;w(t)和v(t)分别为系统噪声和测量噪声,假设两者为零均值的白噪声,且互不相关。
扩展卡尔曼滤波能够应用于非线性系统的关键步骤是在使用时对连续的非线性方程进行局部转化处理,公式如下
φ(t)=eF(t)·Δt≈I+F(t)Δt
(13)
式中:F(t)、H(t)分别为非线性函数f(x(t),u(t))与h(x(t),u(t))对状态变量求偏导得到的雅克比矩阵;φ(t)为状态转移矩阵;Δt为采样时间。
在使用EKF算法时,需要对初值进行设定。根据文献[14]提出的初值选择方法对状态变量、误差方差阵P、系统噪声方差阵Q以及测量噪声方差阵R赋初值。

图3 扩展卡尔曼滤波算法框图Fig.3 The block diagram of Extended Kalman Filer algorithm
估计轮胎侧向力的EKF滤波算法框图见图3[15]。
采用阶跃仿真试验来验证轮胎侧向力估计算法的精度。仿真试验工况如下:转向盘转角幅值为70°,分别对汽车在40 km/h、60 km/h、80 km/h下前轴轮胎侧向力进行估计。将估计值与非线性车辆模型前轴轮胎侧向力的真值进行对比(见图4)。
由图4可知,在不同车速下,前轴轮胎侧向力估计值与非线性车辆模型参考值之间的差值相对于前轴轮胎侧向力是较小的(经计算,相对误差率<3%),说明通过扩展卡尔曼滤波状态估计器得到的估计结果是准确的。
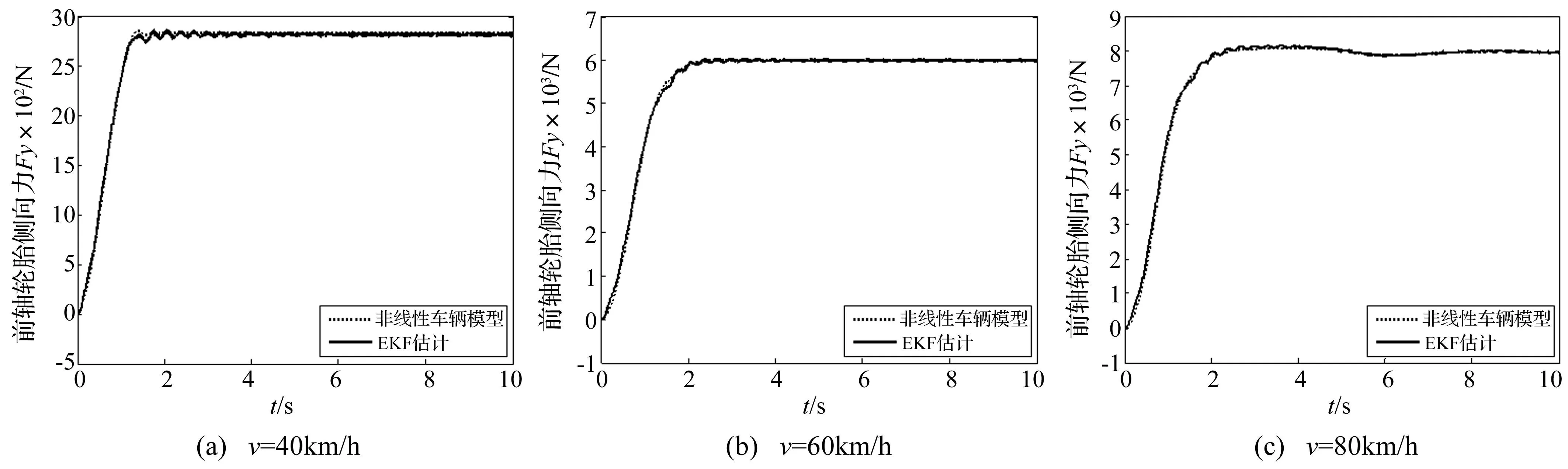
图4 车辆前轴轮胎侧向力Fig.4 The tire lateral force of vehicle axle front axle
4基于EKF轮胎侧向力估计的AFS和EPS的集成控制策略

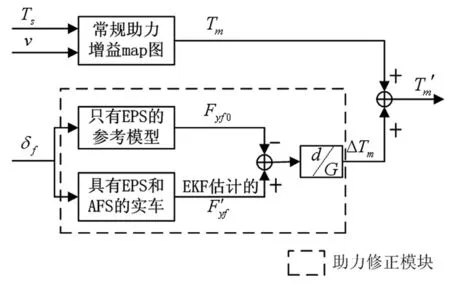
图5 助力修正Fig.5 Assist correction
(14)
式中,d为轮胎拖距,即主销后倾引起机械拖距及气态拖距之和式(9)可以改写为:
(15)
5系统仿真与分析
为了验证所提出的助力修正策略,进行主动转向附加转角干预时转向盘力矩阶跃仿真试验。根据现有的研究方法确定的仿真试验工况如下:转向盘转角幅值为70°,在第6 s时,主动转向施加给转向轴-30°的附加转角。
在车速分别为40 km/h、60 km/h、80 km/h时,助力电机的输出力矩和转向盘转矩的阶跃响应见图6。同时给出车速40 km/h工况下的横摆角速度见图7。在图6、图7中,“无助力修正”是指不采取任何助力修正策略时的转向盘力矩;“有助力修正”是指采用助力修正策略时的转向盘力矩。
由图6可知,具有主动转向和电动助力转向的车辆在不同车速下无助力修正时,转向盘转矩都发生了较大的突变;而采取助力修正控制策略后,转向盘转矩的突变量得到了有效的控制。为了评价转向盘转矩突变量的改善程度,定义突变量剩余百分比如下
(16)
式中,Td0为主动转向作用之前转向盘力矩的稳态值;Td1为主动转向作用之后无助力修正时转向盘力矩的稳态值;Td2为主动转向作用之后有助力修正时转向盘力矩的稳态值。

图6 助力电机的输出力矩和转向盘转矩Fig.6 The output torque of EPS motor and steering wheel torque

图7 40 km/h时横摆角速度Fig.7 The yaw rate at 40 km/h
不同车速时的转向盘力矩突变量剩余百分比见表2。从表2可知,各车速工况下转向盘力矩突变量百分比能较好的维持在0%附近,即此助力修正能有效的消除由主动转向附加转角而引起的转向盘力矩突变。
由图7可知,有助力修正控制时的横摆角速度和无助力修正时的基本相同。车辆的横摆角速度是衡量车辆稳定性的重要指标之一,所以施加助力修正能维持AFS对车辆稳定性起到的修正作用。
因此,本文提出的助力修正策略,在全车速范围内,既能有效的控制由于主动转向附加转角而引起的转向盘力矩突变,也能保证AFS对车辆稳定性的修正作用,这样能够使驾驶员充分感知路面信息,减少由于转向盘力矩突变而引起的误操作,提高驾驶稳定性和安全性。

表2 各车速下突变量剩余量百分比
6结论
(1)建立了AFS和EPS集成系统的非线性数学模型和基于MATLAB/Simulink的仿真模型。
(2)针对非线性轮胎力构建扩展卡尔曼滤波观测器,经验证具有良好的估计精度。这样就能实现对轮胎侧向力的准确估计,及时发现轮胎侧向力的突变。
(3)根据通过卡尔曼滤波观测器得到的轮胎侧向力,对由主动转向附加转角而引起的转向盘力矩突变进行助力修正控制,实现了车辆状态估计与车辆控制的结合。仿真结果表明,在不同车速下,本文所提出的助力修正控制能有效地解决转向盘力矩突变,同时AFS对车辆稳定性的修正作用,使AFS和EPS的集成控制系统能提供良好的运动学和动力学性能。
参考文献
[1]魏建伟,魏民祥.基于主动转向干预的EPS系统转向盘力矩突变修正策略[J].南京航空航天大学学报,2011,43(4):572-576.
WEI Jian-wei, WEI Min-xiang.Correction strategy of steering wheel torque for EPS system based on intervention of active steering [J]. Journal of Nanjing University of Aeronautics & Astronautics,2011,43(4):572-576.
[2]Minaki R, Hoshino H, Hori Y. Ergonomic verifica-tion of reactive torque control based on driver’s sensitivity characteristics for active front steering [C]//Proceedings of Vehicle Power and Propulsion Conference. Dearborn, MI,USA, 2009: 160-164.
[3]Minaki R, Hori Y. Experimental verification of driver-friendly reactive torque control based on driver sensitivity to active front steering[C] //35th Annual Conference of the IEEE Industrial Electronics.Porto,Portugal,2009:3077-3082.
[4]魏建伟,魏民祥,李玉芳.主动转向干预时EPS助力修正控制策略与评价[J].中国机械工程,2012,23(15):1873-1876.
WEI Jian-wei, WEI Min-xiang, LI Yu-fang. Evaluation and correction control strategy of assistant torque for EPS with interference of active steering [J]. China Mechanical Engineering, 2012, 23(15): 1873-1876.
[5]余志生.汽车理论[M].北京:机械工业出版社,2008.
[6]Bakker E, Nyborg L, Pacejka H B. Tyre modelling for use in vehicle dynamics studies[C].SAE Paper 870421,1987.
[7]Mitschke M, Wallentowitz H. Dyna-mik der Kraftfahrzeuge[M].北京:清华大学出版社,2009.
[8]Badawy A, Zuraski J, Bolourchi F, et al. Modeling and analysis of an electric power steering system[C]. SAE Paper 1999-01-0399, 1999.
[9]赵林峰,陈无畏,秦炜华,等.低附着路面条件的EPS控制策略[J].机械工程学报,2011,47(2):109-114.
ZHAO Lin-feng, CHEN Wu-wei, QIN Wei-hua, et al. Electric power steering on low friction coefficient road [J]. Journal of Mechanical Engineering, 2011, 47(2): 109-114.
[10]郭洪艳,陈虹,柳致海. 基于EKF的汽车轮胎力估计研究[J].仪器仪表学报,2009,30(6):250-254.
GUO Hong-yan, CHEN Hong, LIU Zhi-hai. The research of vehicle tire-road force estimation based on EKF[J]. Chinese Journal of Scientific Instrument, 2009, 30(6): 250-254.
[11]郭孔辉,付皓,丁海涛.基于扩展卡尔曼滤波的汽车质心侧偏角估计[J].汽车技术,2009,4:1-3.
GUO Kong-hui, FU Hao, DING Hai-tao. Estimation of CG sideslip angle based on extended kalman filter [J]. Automobile Technology, 2009, 4: 1-3.
[12]Wilkin M A, Crolla D C,Levesley M C, et al. Estimation of non-linear tyre forces for a performance vehicle using an extended kalman filter[C]. SAE Paper 2004-01-3529, 2004.
[13]Wilkin M A, Crolla D C, Levesley M C, et al. Design of a robust tyre force estimator using an extended kalman filter[C]. SAE Paper 2005-01-0402, 2005.
[14]Ray L R. Nonlinear tire force estimation and road friction identification: Simulation andexperiments [J]. Automatica,1997,33(10):1819-1833.
[15]Grewal M S, Andrews A P.Kalman filtering theory and practice using MATLAB [M]. America: John Wiley &Sons,2008.