基于改进正则化方法的状态空间载荷识别技术
2016-01-15 02:24华宏星
振动与冲击 2015年11期
马 超,华宏星
(上海交通大学机械系统与振动国家重点实验室,上海 200240)
第一作者马超男,博士生,1982年生
基于改进正则化方法的状态空间载荷识别技术
马超,华宏星
(上海交通大学机械系统与振动国家重点实验室,上海200240)
摘要:由于噪声和系统特性的影响,载荷识别问题往往是不适定的,为了克服该问题获得稳定解,一般采用正则化技术来处理,可是直接利用传统正则化方法重构载荷,识别出的载荷的精度不是很高,本文提出采用一种改进正则化方法,数值仿真结果表明该方法能够有效地抑制噪声的影响,从而更精确的识别出载荷。
关键词:不适定;正则化;稳定解;载荷识别;状态空间
收稿日期:2014-03-05修改稿收到日期:2014-06-06
中图分类号:Tp12;Tp13.3
文献标志码:A
DOI:10.13465/j.cnki.jvs.2015.11.026
Abstract:Due to the influence of noise and system property, a load identification problem is always ill-posed, in order to deal with this issue, it is necessary to use the regularized technique. Here, an improved regularized technique was proposed to get the stable solution. Numerical tests were made to verify the proposed method, and the results were compared with those identified using the traditional Tikhonov regularization method. It was shown that the proposed method gives better results than the traditional Tikhonov regularization method does.
State space load identification technique based on an improved regularized method
MAChao,HUAHong-xing(State Key Laboratory of Mechanical System and Vibration, Shanghai Jiao Tong University, Shanghai 200240, China)
Key words:ill-posed; regularization; stable solution; load identification; state space
载荷识别技术已被广泛地应用于土木,运输及航空等领域中。载荷识别的研究属于结构动力学方面的第二类逆问题[1],该技术是根据已知结构的动态特性和实测的动态响应来反演作用于结构上的动态载荷的一门技术。由于在许多实际工程问题中,为了保证工程结构的安全性和可靠性,需要准确的确定作用于结构上的动态载荷,因此,如何有效精确的识别出载荷具有十分重要的意义。
从数学的角度来看,由于测量噪声和系统特性的影响,载荷识别问题往往属于不适定问题,解决这类问题通常采用正则化技术处理[2-5]。本文提出采用一种改进正则化技术来重构载荷,数值结果表明该方法具有较高的识别精度。
1状态空间载荷识别模型
对于线性时不变动态系统,其离散状态空间方程可以表示为:
xk+1=Axk+Bfk
(1)
其中xk表示状态空间变量,fk为外载荷向量,A和B分别为系统矩阵和输入矩阵。相应地输出方程可以表示为:
yk=Cxk
(2)
式中C为输出影响矩阵,yk为响应向量。本文以位移数据作为测量响应量来反演载荷。
假定初始状态量x0已知,将式(1)代入式(2)中,则式(2)最终可以表示为:

式(3)即为本文进行状态空间载荷识别的数学模型。
2传统Tikhonov正则化方法
一般说来,对于式(3)的求解,其最小二乘解可表示为:
(4)

(1)矩阵H的奇异值逐渐变为零
(2)矩阵H的条件数太大。
为了克服该问题,获得稳定解,必须采用正则化方法。目前应用广泛且相当有效的正则化方法是Tikhonov正则化方法,其表达式为:
(5)
式中φ为正则化参数。其正则解表示为:
(6)
与式(4)比较发现,式(6)右端系数矩阵部分增加了φI项,因为该项可以起到克服方程系数矩阵病态的作用,所以可以得到稳定解。由于式(6)中的正则化解与参数φ有关,φ的取值不同,其解也不同,故如何选取合适的参数φ是式获得稳定解的关键。对于参数的确定准则常用方法有:GCV法[7],L-曲线法[8]等。文中在利用传统Tikhonov正则化技术反演载荷时,采用GCV法来确定正则化参数。
3改进正则化技术
引入稳定泛函:
(7)
式中λ为正则化参数,满足0<λ<1。
正则解F为泛函φλ(F)的最小值点。使式(7)对F求导,并令其导数等于零,得:
(1-λ)H*(HF-Y)+λF=0
(8)
求解上式得:
Fλ=[(1-λ)H*H+λI]-1(1-λ)H*Y
(9)
式(9)即为改进正则化方法的正则解。对于式(9)中正则化参数λ的确定,本文采用以下公式选取[9]:
(10)
式中N为迭代步数,N0为初值选取参数(一般选0~5之间的整数),β为下降速率参数(一般建议取0.5左右的数值),λ(N)为第N步时的正则化参数值。在本文中N0取零值,β等于0.5。
为了评估载荷识别的精度,定义相对误差函数如下:
(11)
式中Fk为第k次迭代后重构的载荷,F为真实的载荷值。在实际工程应用中,由于F未知,该评价指标无法使用,需采用其它指标来评价(如响应相对误差函数指标)。
4算例研究与试验验证
为了验证本文所提方法的有效性,通过数值仿真与实验对该方法进行了验证。
4.1数值仿真

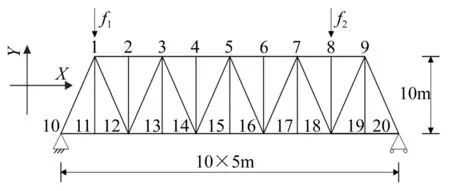
图1 平面桁架结构Fig.1 The plane truss structure
(12)
由于实际测量的响应数据都含有噪声,为模拟真实的工程情景,利用公式(13)来添加噪声。

(13)


图2 无噪声情况下的Picard图Fig.2ThePicardplotwithnoisefreedata图3 无噪声情况下的识别结果图(其中a和b分别表示f3和f7的辨识结果图)Fig.3Theforceidentificationresultsoff3(a)andf7(b)withnoisefreedata
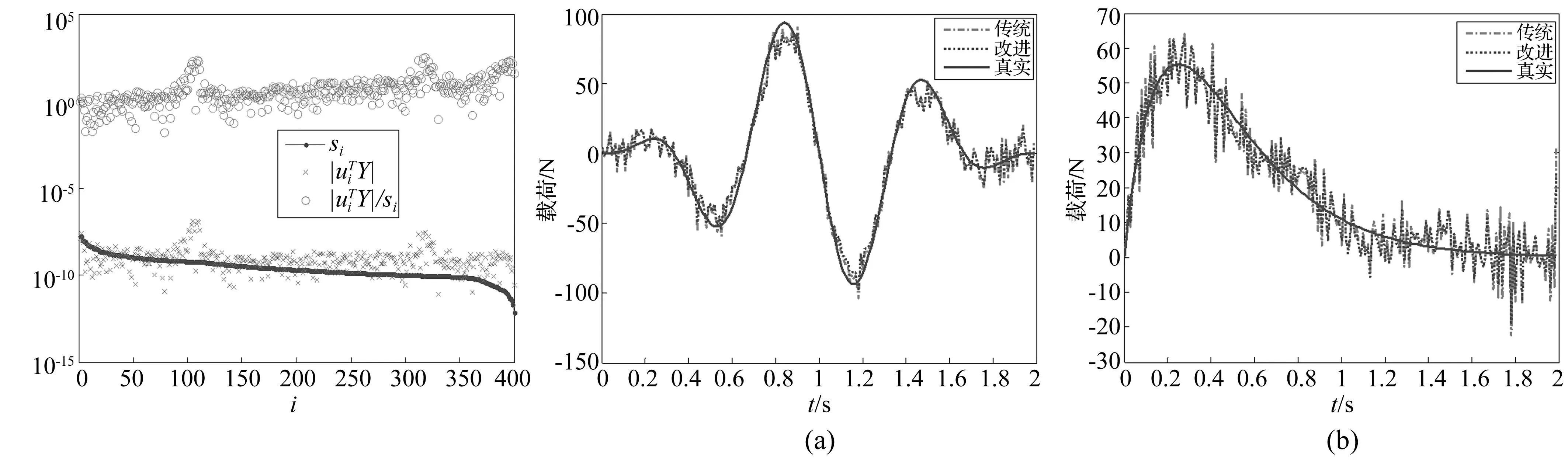

图4 Picard图Fig.4ThePicardplot图5 在α=0.1噪声下的辨识结果图(其中a和b分别表示f1和f2的辨识结果图)Fig.5Theforceidentificationresultsoff1(a)andf2(b)withα=0.1noise
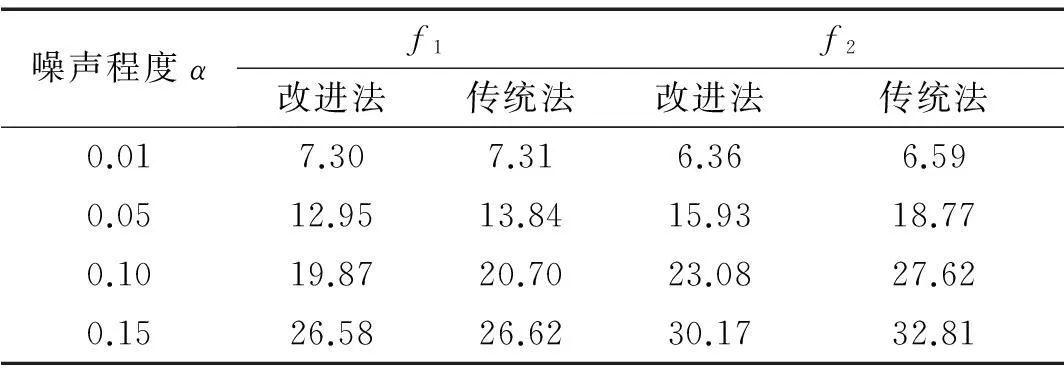
表1 不同噪声情况的误差值

表2 不同采用时间间隔下的误差值
4.2试验验证
图6为本文进行试验的试件图,其设计尺寸见图中所示,图中‘A’表示激励点位置,‘1’和‘2’表示测点位置。表3列出了该结构前四阶的固有频率及阻尼比。在进行载荷识别前,本文采用子空间辨识法[11]对系统参数进行识别获取系统矩阵(A,B和C)。为了验证本文方法的有效性,在激励点施加107 Hz的正弦信号,利用加速度传感器(HD-YD-216)测量出响应数据,同时利用力传感器(B&K 8200)测量出载荷数据作为辨识结果的对比值。在试验过程中,采样时间间隔为1/1 024 s。由于文中建立的载荷辨识模型是基于位移响应建立的,因此需将加速度响应数据转换为位移响应,文中采用频域积分法[12]对该问题进行了处理。在获得以上数据后,采用本文推荐的方法就可辨识出载荷,图7为辨识结果图。从图7可知,改进法的辨识结果曲线与真实载荷曲线基本吻合,识别精度明显优于传统法。

图6 试件图Fig.6 The figure for specimen

序号固有频率/Hz阻尼比/%113.1360.64253.8570.54384.9450.164107.9280.14

图7 辨识结果图Fig.7 The identified results
5结论
由于载荷识别问题往往是不适定的,本文提出了一种基于改进正则化方法的状态空间载荷识别技术,并把辨识结果与传统Tikhonov正则化的结果进行比较研究,数值仿真和试验结果表明本文提出的方法在对状态空间载荷辨识方面具有更高的辨识精度和鲁棒性。
参考文献
[1]张方,唐旭东,秦远田,等. 结构连续分布的动态随机载荷识别方法研究[J]. 振动与冲击, 2006,25(2): 120-124.
ZHANG Fang,TANG Xu-dong,QIN Yuan-tian,et al. The identification method of dynamic randon load distributing on structure[J]. Journal of Vibration and Shock, 2006,25(2): 120-124.
[2]Jacquelin E, Bennani A, Hamelin P. Force reconstruction: analysis and regularization of a deconvolution problem[J]. Journal of Sound and Vibration, 2003, 265 (1): 81-107.
[3]Mao Y, Guo X, Zhao Y. A state space force identification method based on Markov parameters precise computation and regularization technique[J]. Journal of Sound and Vibration, 2010, 329 (15): 3008-3019.
[4]郭杏林,毛玉明,赵岩,等. 基于Markov参数精细积分法的载荷识别研究[J]. 振动与冲击,2009,28(3): 27-30.
GUO Xing-lin,MAO Yu-ming,ZHAO Yan,et al. Load identification based on precise time-step integration for Markov parameters[J].Journal of Sound and Vibration, 2009,28(3): 27-30.
[5]Choi H, Thite A, Thompson D. A threshold for the use of Tikhonov regularization in inverse force determination[J]. Applied Acoustics, 2006, 67 (7): 700-719.
[6]毛玉明. 动载荷反演问题时域分析理论方法和实验研究[D]. 大连:大连理工大学,2009.
[7]Golub G H, Heath M, Wahba G. Generalized cross-validation as a method for choosing a good ridge parameter[J]. Technometrics, 1979, 21 (2): 215-223.
[8]Hansen P C. The L-curve and its use in the numerical treatment of inverse problems[M]. IMM, Department of Mathematical Modelling, Technical Universityof Denmark, 1999.
[9]王浩,卢孝强,孙怡. 基于改进正则化方法的有限角度 CT 图像重建算法[J]. CT 理论与应用研究, 2008, 17 (4): 15-22.
WANG Hao, LU Xiao-qiang, SUN Yi. CT reconstruction algorithm from limited-angle using modified regularization method[J].CT Theory and Applications, 2008, 17 (4): 15-22.
[10]Hansen P C. The discrete picard condition for discrete ill-posed problems[J]. BIT Numerical Mathematics, 1990, 30(4): 658-672.
[11]徐丽霞,黄贞益,孔祥伟. 基于N4SID子空间辨识的轧机系统性能改进分析[J]. 振动与冲击,2013,32(4):142-145.
XU Li-xia, HUANG Zhen-yi, KONG Xiang-wei. Performance improvement analysis of a rolling mill based on N4SID subspcae identification method[J].Journal of Sound and Vibration, 2013,32(4): 142-145.
[12]张志,孟少平,周臻,等. 振动台试验加速度积分方法[J]. 振动、测试与诊断,2013,33(4):627-633.
ZHANG Zhi,MENG Shao-ping,ZHOU Zhen,et al. Numerical integration method of acceleration recodes for shaking table test[J]. Journal of Vibration, Measurement & Diagnosis,2013,33(4):627-633.