考虑齿侧间隙的非等模数非等压力角行星齿轮系统的均载特性研究
2016-01-15 02:09叶福民朱如鹏靳广虎鲍和云李发家
振动与冲击 2015年11期
叶福民,朱如鹏,靳广虎,鲍和云,李发家
(1.南京航空航天大学机电学院,南京 210016; 2.江苏科技大学机械工程学院,镇江 212003)
第一作者叶福民男,博士生,副教授,1968年生
考虑齿侧间隙的非等模数非等压力角行星齿轮系统的均载特性研究
叶福民1.2,朱如鹏1,靳广虎1,鲍和云1,李发家1
(1.南京航空航天大学机电学院,南京210016; 2.江苏科技大学机械工程学院,镇江212003)
摘要:针对非等模数非等压力角行星齿轮传动系统,建立了多自由度平移-扭转振动的非线性动力学模型。考虑到齿轮副齿侧间隙、系统综合误差和齿轮副模数与压力角的不相等,计算了系统的均载系数并对由它们所引起的系统不均载特性进行了动力学分析。获得了误差一定且齿侧间隙改变时,啮合副的动载荷曲线与均载系数间的变化关系。讨论了齿轮副模数和压力角分别不同时,系统均载系数的变化幅度。研究表明:随着齿轮副压力角选择范围的扩大,系统均载系数有着较大幅度的变化;齿侧间隙使系统的啮合副处于不同冲击状态,不同冲击状态对系统的均载性能有着重要的影响。
关键词:行星传动;非等模数非等压力角;均载;非线性特性
基金项目:国家自然科学基金(51305196);中央高校基本科研业务费专项资金资助项目(NZ2014201)
收稿日期:2013-12-11修改稿收到日期:2014-04-16
通信作者朱如鹏男,教授,博士生导师,1959年生
中图分类号:TH132.4
文献标志码:A
DOI:10.13465/j.cnki.jvs.2015.11.036
Abstract:A translation-torsion coupled nonlinear dynamic model with multi-DOF was established for a planetary gear train system with non-equivalent modulus and pressure angle. Considering backlashes, system’s comprehensive errors and non-equivalent modulus and pressure angle of gear pair, the load sharing coefficient of the system was calculated. The dynamic characteristics of load sharing caused by the factors mentioned above were analyzed. Some relations between the dynamic load curve of gear pair and the load sharing coefficient were obtained due to certain errors and changes of backlash. The change range of the system load sharing coefficient was discussed with the variation of gear modulus and pressure angle. The results showed that the load sharing coefficient has a larger variation with increase in selecting range of pressure angle of gear pair, and the different impacts of meshing pair caused by backlashes have important influences on the load sharing characteristics of the planetary gear train system.
Load sharing characteristics of a planetary gear train system with non-equivalent modulus and pressure angle considering backlashes
YEFu-min1,2,ZHURu-peng1,JINGuang-hu1,BAOHe-yun1,LIFa-jia1(1. College of Mechanical and Electrical Engineeing, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China;2. College of Mechanical Engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, China)
Key words:planetary gear train; non-equivalent modulus and pressure angle; load sharing; nonlinear characteristics
出于齿轮润滑和便于安装的考虑,在设计齿轮系统时,齿间应保留有一定的齿侧间隙。同时,制造和安装过程中出现的误差以及运转过程中的齿轮磨损均会使齿轮副产生齿侧间隙。由于齿侧间隙的存在,轮齿间的接触状态会发生变化,进一步导致轮齿间的接触、脱离、再接触的重复冲击,这种由齿侧间隙引发的冲击带来的强烈振动、噪声和较大的动载荷,造成行星齿轮系统的不均载,影响齿轮传动系统的寿命和可靠性[1-2]。非等模数非等压力角啮合副只需满足法节相等,即便模数和压力角不相等,它同样能够正常啮合传动。采用非等模数非等压力角啮合副的行星齿轮系统,可以使其设计空间大,优化设计结果更为理想[4]。但是,由于非等模数非等压力角行星齿轮系统的参数增多,同时考虑到内外啮合副齿侧间隙的影响,系统的动力学特性将更为复杂。因此,在考虑齿侧间隙时的该齿轮系统的动载荷和均载特性的研究将成为必要。
国内外学者对行星齿轮系统进行了研究,并取得许多成果。Inalpolat[5]、Kahraman[6-8]、Bodas[9]和Singh[10]研究了行星轮系的均载问题,提出了均载系数和动载系数来表征行星齿轮的均载性能;讨论了齿轮位置度偏差和齿形误差对系统均载特性的影响并进行了试验验证;建立系统的动力学模型,考虑了构件的扭转、横向和纵向位移、时变刚度和综合传动误差等,分析了其动力学特性,研究了各参数对系统响应的影响。陆俊华[11]分析行星传动系统的装配误差和安装误差的变化对系统均载特性的影响。但他们大都未考虑齿侧间隙的影响。孙智民[12]研究了齿侧间隙对星型齿轮传动系统啮合副的单边冲击、双边冲击和非冲击状态之间的关系以及其对齿轮动载荷等动态特性的影响。孙涛[13]分析和研究了行星齿轮传动系统的各路载荷分配不均匀性的影响。
作者所在课题组进行了与相关行星齿轮传动系统均载性能的试验研究,验证了本文行星齿轮传动系统非线性动力学模型的正确性[14]。本文在其基础上以非等模数非等压力角啮合副所构成的行星齿轮传动系统为研究对象,研究了齿轮副模数不同时,系统均载系数的变化幅度;探讨了在系统综合误差一定时的系统动载荷曲线,并分析了齿侧间隙对系统均载性能的影响。所作研究为该行星齿轮系统动力学主动设计提供理论基础。
1系统的等效力学模型
图1是行星齿轮传动系统的非线性动力学计算模型。以行星架为参考坐标系,仅考虑行星架的扭转自由度,原点设在行星架中心;通常太阳轮采用浮动结构,故考虑太阳轮的扭转、中心横向和中心纵向自由度,并将其固定于行星架,太阳轮中心重合于坐标系原点;仅考虑行星轮的扭转自由度,将N个行星轮的坐标系也固定于行星架,原点取为行星轮中心。其中,rbs和rbp分别为太阳轮和行星轮的基圆半径;rbc为行星架的当量基圆半径。

图1 行星齿轮传动系统的非线性动力学计算模型Fig.1 Nonlinear dynamic analysis model of planetary gear train
该模型有(N+4)个自由度,它的广义坐标为X=[xs,xh,xv,xpi,xc]T。其中,xs为太阳轮沿啮合线方向的切向微位移;xh和xv分别为太阳轮中心横向微位移和中心纵向微位移;xpi为第i个行星轮沿啮合线方向的切向微位移;xc为行星架沿啮合线方向的切向微位移。
2系统的微分运动方程
齿轮沿外、内啮合副间的相对位移Xspi和Xrpi为
(1)
式中,asp为外啮合副的实际啮合角;φi为行星齿轮的位置角;espi和erpi为系统内外啮合副上的综合误差,由于其有明显的周期性,那么可表示为
(2)
式中,ω为系统的激励频率;espim和erpim分别表示第i个外啮合副和内啮合副上的平均综合误差;ue为内外啮合副综合误差的波动系数。
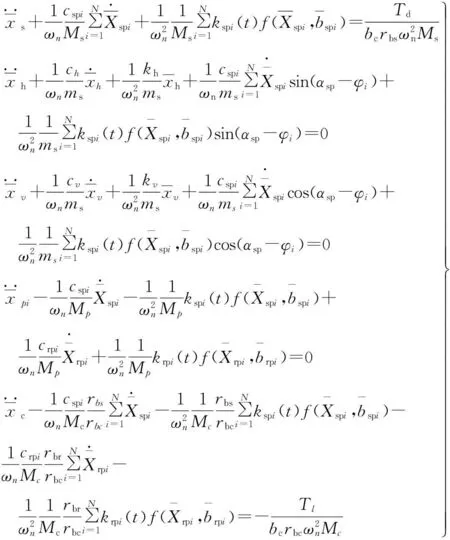
由图1及牛顿定律得系统运动微分方程为
(3)
式中:Ms、Mp和Mc分别为太阳轮、行星轮和行星架的当量质量,ms为太阳轮的质量;Td和Tl分别为输入转矩和负载转矩;kh和kv分别为太阳轮支撑轴在其安装处的横向和纵向支撑刚度;ch和cv分别为太阳轮支撑轴在其安装处的横向和纵向阻尼系数;arp为内啮合副的实际啮合角;kspi和krpi为系统内外齿轮副的时变啮合刚度,其可表示为
(4)
式中,kspim和krpim分别为第i个外啮合副和内啮合副上的平均平均啮合刚度;uk为内外啮合副啮合刚度的波动系数。
式(3)中的f(xq)为齿侧间隙非线性函数,其包含的元素都有统一形式,即
(5)
式中:bj为相应的齿侧间隙,j=spi, rpi。

定义系统中各齿轮副动载荷系数如下:
(7)
式中:Frpi和Fspi分别为内啮合副和外啮合副的轮齿间的啮合力,它们可表示为
(8)
非等模数非等压力角行星齿轮传动系统的各啮合副的均载系数采用文献[4]中的定义。系统的均载系数取各啮合副均载系数的最大值。
3参数影响分析
某非等模数非等压力角行星齿轮传动系统的参数见表1。行星轮个数为3,齿轮宽度为15 mm。其它主要参数有:啮合刚度平均值krpim和kspim分别为2.92×108N/m和2.42×108N/m,啮合刚度波动系数uk与啮合副综合误差的波动系数ue均为0.15,采用Runge-Kutta数值法对系统运动微分方程式(6)进行仿真计算,获得该行星齿轮传动系统的非线性动力学响应。
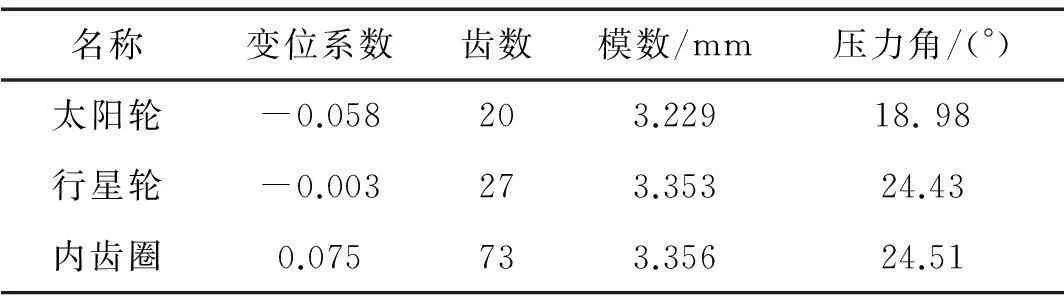
表1 行星齿轮传动系统的主要参数
3.1齿侧间隙不同时的啮合副均载系数
为研究齿侧间隙对非等模数非等压力角行星齿轮传动系统均载性能的影响,系统无量纲激励频率为0.50,假设内外啮合副的综合平均误差相同且分别取值为5 μm和50 μm,当各齿轮副齿侧间隙brpi和bspi为等值且取0,10,50,100和200 μm时,分别计算获得系统的各齿轮副的均载系数(文中未给出内啮合副情况),见表2。

表2 综合误差和齿侧间隙不同时各啮合副的均载系数
注:①表示啮合副的综合误差(μm)
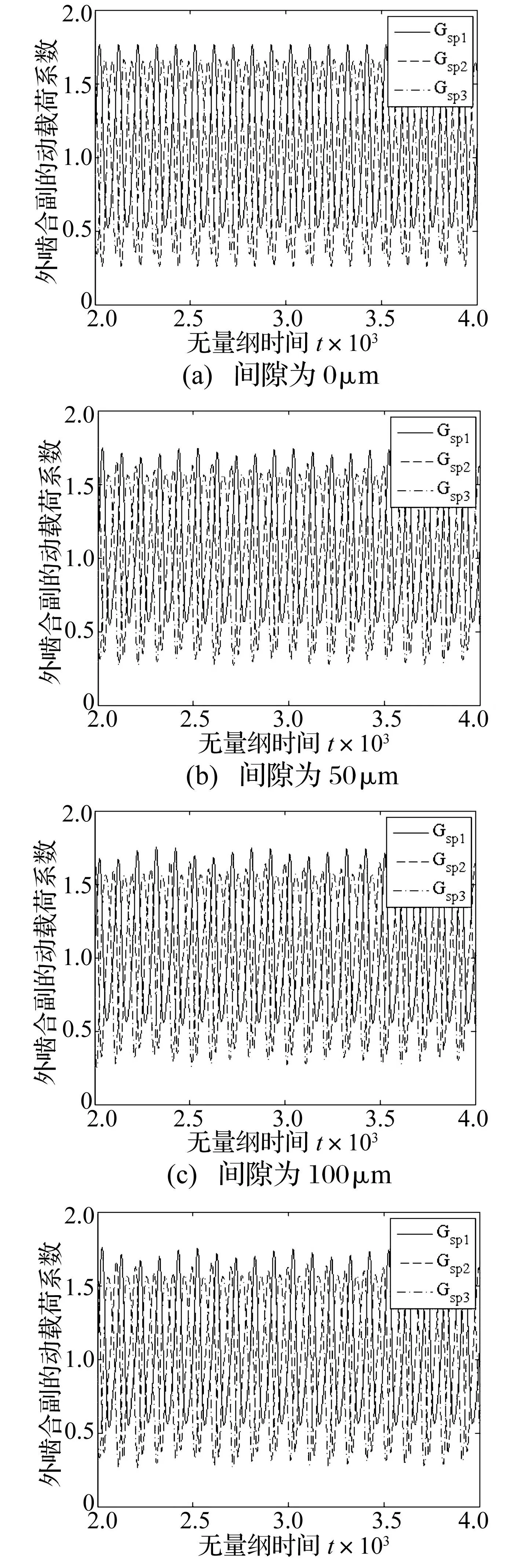
图2 外啮合副综合误差为5μm时的动载荷曲线Fig.2 Curve of dynamic load when meshing pair error is 5 μm

图3 外啮合副综合误差为50 μm时的动载荷曲线Fig.3 Curve of dynamic load when meshing pair error is 50 μm
由表2可知,当内外啮合副综合误差值为5 μm,同时齿侧间隙分别为0,10和50 μm,各啮合副均载系数减小,说明此时齿侧间隙有利于系统的均载性能。是由于当综合误差较小时,系统的非线性特征不很明显,外啮合副的动载荷为正值,外啮合副啮合过程中轮齿均不脱离,系统稳定且轮齿间不发生冲击现象,动载荷曲线见图2(a)和图2(b)。当齿侧间隙为100μm和200 μm时,系统的动载荷曲线仍为正值,动载荷曲线见图2(c)和图2(d)。此时均载系数变大,但增大幅度较为平缓。
当外啮合副综合误差为50 μm数量级上时,系统处于啮合冲击状态,并且随着齿侧间隙的增大,系统的啮合冲击形式由双边冲击向单边冲击转化(见图3)。其中,在图3(a)中的齿侧间隙为0 μm时,系统三路齿轮副均处于双边冲击状态;在图3(b)中的齿侧间隙为20 μm时,系统中有一路(第3路)变为单边冲击,两路(第1、2路)保持为双边冲击;在图3(c)中的齿侧间隙为100 μm时,单边冲击的发生范围进一步扩大,系统中有两路(第2、3路)变为单边冲击,一路(第1路)保持为双边冲击;当齿侧间隙为200 μm时,如图3(d),此时系统中所有三路齿轮副全部变为单边冲击状态。此时均载系数在1.070到1.293间的变化,齿侧间隙越大,系统均载性能的总体趋势越差,但与文献[13]的研究相比,没有出现特别恶劣的情况。
由以上分析可知,在系统综合误差较小时,齿轮副处于非冲击状态,齿侧间隙对系统载荷分配的影响不大。随着系统综合误差变大,齿轮副处于冲击状态,当齿侧间隙较小时,有间隙比无间隙时的均载性能稍好;当齿轮副出现单边冲击状态,随着齿侧间隙的增大,系统的均载性能变差。齿侧间隙与齿轮误差的相互交织,其对系统的均载性能影响更为复杂。但系统无论处于何种状态,系统综合误差始终是影响行星齿轮传动系统均载性能的重要因素。
3.2模数不同时的系统的均载系数
为研究压力角对行星齿轮传动系统均载性能的影响,无量纲激励频率Ω为1.04,综合误差幅值为10 μm,内外啮合副齿侧间隙brpi和bspi也为10 μm,系统其它参数不变,计算获得该行星齿轮传动系统的均载系数,根据内外啮合副的压力角是否相同,分两种情况讨论。①外啮合压力角不相等而内啮合压力角相等,即行星轮压力角与内齿圈的相同,αp(αr)均为20°,而太阳轮压力角αs由23°至28°之间变化(见表3);②外啮合压力角相等而内啮合压力角不相等,即太阳轮压力角与行星轮的相同,αs(αp)均为20°,而内齿圈压力角αr由23°至28°之间变化(见表4)。
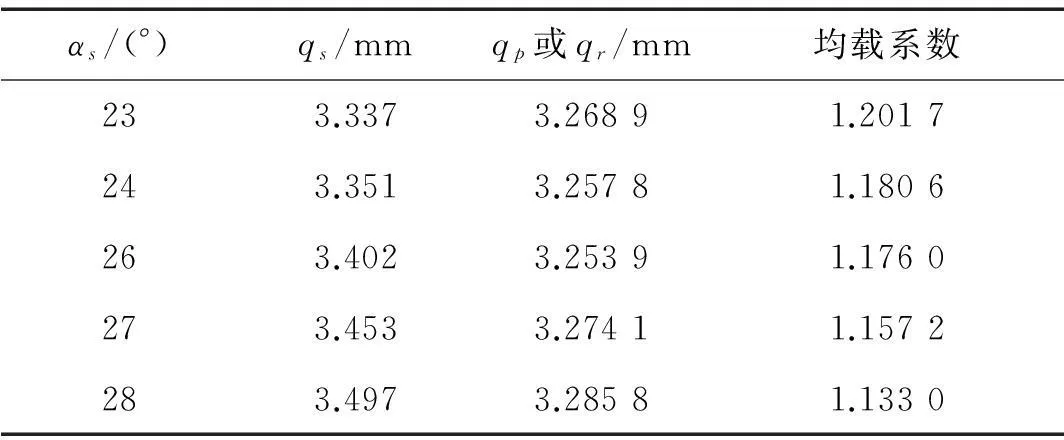
表3 太阳轮压力角取不同值的均载系数

表4 内齿圈压力角取不同值的均载系数
由表3和表4可知,随着压力角和模数的改变,系统的均载系数均有相应的变化,当在该综合误差和系统激励频率下,压力角或模数取不同值时,均载系数在1.1330至1.20170间变化。其与不考虑齿侧间隙时的线性系统规律相一致。因此,在行星齿轮传动系统的设计中,可以借助于优化设计的方法,以均载系数与系统所达到的均载性能相一致为优化设计目标,以齿侧间隙、各齿轮的模数和压力角等为优化设计变量,可寻求最合适的齿轮模数与压力角,使行星齿轮系统有着更好的均载性能。
4结论
(1)研究非线性模型下该齿轮传动系统功率分流均载特点,计算行星齿轮传动系统动载荷的时域历程,从而获得考虑间隙时的均载系数。
(2)在齿轮副处于非冲击状态时,齿侧间隙对齿轮系统载荷分配的影响不很显著。齿轮副处于双边冲击状态,齿侧有间隙比无间隙时的均载性能稍好;当齿轮副出现单边冲击状态,随着齿侧间隙的增大,系统均载性能变差的趋势明显。
(3)计算不同的啮合副模数和压力角组合下行星齿轮传动系统均载系数。结果表明:随着压力角和模数的改变,系统均载系数的变化幅度较大。
(4)在行星齿轮传动系统的设计中,借助于优化设计的方法,获得合适的啮合副齿侧间隙以及齿轮副的压力角或模数,可以使系统有着更好的均载性能。
参考文献
[1]李英明, 陈卫东, 陈奇, 等. 齿侧间隙对齿轮副非线性振动特性的影响研究[J].机械传动,2013,31(5):1-5.
LI Ying-ming, CHEN Wei-dong, CHEN Qi, et al. Research of the influence of gear backlash on gear pair nonlinear vibration characteristic[J]. Journal of Mechanical Transmission, 2013,31(5):1-5.
[2]李润方, 王建军. 齿轮系统动力学——振动、冲击、噪声[M]. 北京: 科学出版社, 1997.
[3]叶福民, 朱如鹏, 鲍和云. 非等模数非等压力角NGW型行星齿轮系优化设计研究[J]. 机械科学与技术, 2011,30(3):351-354.
YE Fu-min, ZHU Ru-peng, BAO He-yun. Optimization design of NGW planetary gear transmission with non-equivalent modulus and pressure angle[J]. Mechanical Science and Technology for Aerospace Engineering, 2011,30(3):351-354.
[4]叶福民, 朱如鹏, 鲍和云, 等. 非等模数非等压力角NGW型行星齿轮系动力学均载特性[J]. 华南理工大学学报:自然科学版, 2011,39(1):117-123.
YE Fu-min, ZHU Ru-peng, BAO He-yun,et al. Dynamic load-sharing behaviors of planetary gear train system with unequal moduli and pressure angles[J].Journal of South China University of Technology:Natural Science Edition, 2011, 39(1):117-123.
[5]Inalpolat M, Kahraman A. A dynamic model to predict modulation sidebands of a planetary gear set having manufacturing errors[J]. Journal of Sound and Vibration,2010(329) :371-393.
[6]Ligata H, Kahraman A, Singh A. A closed-form planet load sharing formulation for planetary gear sets using a translational analogy[J]. Journal of Mechanical Design, 2009, 021007-1-021007-7.
[7]Kahraman A, Ligata H, Kienzle K, et al. A kinematics and power flow analysis methodology forautomatic transmission planetary gear trains[J]. Journal of Mechanical Design, 2004, 1071-1081.
[8]Inalpolat M, Kahraman A. Dynamic modelling of planetary gears of automatic transmissions[C]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2008, 229-242.
[9]Bodas A,Kahraman A.Influence of carrier and gear manufacturing errors on the static load sharing behavior of planetary gear sets[J]. J SME Int. J., Ser. C.2004, (47):908-915.
[10]Singh A. Application of a system level model to study the planetary load sharing behavior[J]. ASME J .Mech. Des. 2005,127:469-476.
[11]陆俊华, 朱如鹏, 靳广虎. 行星传动动态均载特性分析[J]. 机械工程学报, 2009,45(5):85 -90.
LU Jun-hua, ZHU Ru-peng, JIN Guang-hu. Analysis of dynamic load sharing behavior in planetary gearing[J].Journal of Mechanical Engineering,2009,45(5): 85-90.
[12]孙智民, 季林红, 沈允文, 等. 齿侧间隙对星型齿轮传动扭振特性的影响研究[J]. 机械设计, 2003, 20(2):3-7.
SUN Zhi-min, JI Lin-hong, SHEN Yun-wen, et al. Influence of backlashes on tosional vibration of star gear train[J]. Journal of Machine Design, 2003, 20(2): 3-7.
[13]孙涛, 沈允文, 孙智民, 等. 行星齿轮传动非线性动力学方程求解与动态特性分析[J]. 机械工程学报, 2002,38(3):11-15.
SUN Tao, SHEN Yun-wen, SUN Zhi-min, et al. Study on nonlinear dynamic behavior of planetary gear train solution and dynamic behavior analysis [J]. Journal of Mechanical Engineering, 2002, 38(3):11-15.
[14]李发家, 朱如鹏, 鲍和云, 等. 行星齿轮系动力学特性分析及试验研究[J]. 南京航空航天大学学报, 2012,44(4):511-519.
LI Fa-jia, ZHU Ru-peng, BAO He-yun, et al. Dynamics characteristics and experiment research on planetary gear system [J]. Journal of Nanjing University of Aeronautics & Astronautics, 2012, 44(4): 511-519.