
基于睡眠呼吸机的无刷直流电机控制系统
2016-02-07 08:21刘晓梅魏立峰
沈阳化工大学学报 2016年4期
刘晓梅, 李 鸥, 魏立峰
(沈阳化工大学 信息工程学院, 辽宁 沈阳 110142)
基于睡眠呼吸机的无刷直流电机控制系统
刘晓梅, 李 鸥, 魏立峰
(沈阳化工大学 信息工程学院, 辽宁 沈阳 110142)
针对用于治疗睡眠暂停综合症(OSAS)的睡眠呼吸机,提出一种基于K60高速单片机控制直流无刷电机系统的解决方案.采用IR2130三相全桥驱动电路控制无刷直流电机转速,给出部分软件设计流程,及双闭环控制方法.仿真结果说明,此方案能够稳定地控制电机转速,验证了系统的实时性和可行性.
睡眠呼吸机; 无刷直流电机; K60单片机; 双闭环控制
阻塞性睡眠呼吸暂停综合症(Obstructive Sleep Apnea Syndrome)简称OSAS,是一种常见且日益受到关注的睡眠呼吸障碍疾病.随着人们对OSAS的不断深入研究,发现它是具有潜在危险的常见疾患,会诱发全身性的严重疾病,如冠心病、高血压、糖尿病等.最为常见、安全有效的治疗就是通过称为持续气道正压(CPAP)的气道来推送空气,为呼吸道系统提供恒定的正压,以防止肌肉阻塞气道.所以研制性能良好、低成本的睡眠呼吸机具有很好的现实意义[1].
由于是睡眠中配戴的家用医疗产品,体积小、转速高、低维护成本的无刷直流电机便成为提供恒定气流压力的首选.考虑到产品的灵活性和实用性,本文提出一种基于微处理器控制直流无刷直流电机的系统解决方案.解决了传统无刷直流电机(BLDC:Brushless DC motor)专用控制集成芯片的局限性,因为睡眠呼吸机的速度控制精度要求不是很高,适合的MCU能满足其控制要求,相对DSP减少了控制成本,真正实现了性能良好、低成本的睡眠呼吸机的研发意义.
1 电机控制系统总体方案设计
呼吸机系统是由气路系统和电机控制系统两大部分组成.本文主要对电机控制系统部分进行设计.当前无刷直流电机的控制方法主要有:专用集成电路(ASIC)控制器、微处理器(MCU)和数字信号处理器(DSP).经仔细研究分析,考虑到控制系统的灵活性和产品成本等诸多因素,本设计最终选择适合的Kinetis K60 微处理器控制方法.
图1所示为有位置传感器的无刷直流电机双闭环调速控制系统框图.该控制系统采用PWM(脉宽调制)方式即通过改变PWM波的占空比来调节直流电压大小从而实现对无刷直流电机转速的控制.K60输出的3对互补PWM经驱动芯片由6个功率场效应管(MOSFET)组成的三相全桥驱动电路对电机进行控制.位置参数由BLDC上的霍尔传感器给出,经捕捉和逻辑处理后用于换相控制.电机实际转速也是通过换相时间计算得到,再和给定转速信号进行比较,偏差经速度PI调节后产生电流参考量,再与电流反馈量进行比较,偏差经电流PID调节后形成PWM占空比控制量,从而改变电机的相电压和相电流,实现对无刷直流电机的速度、电流双闭环控制[2].其中反馈电流通过测量电流采样电阻上的压降经K60内部A/D采样获得.
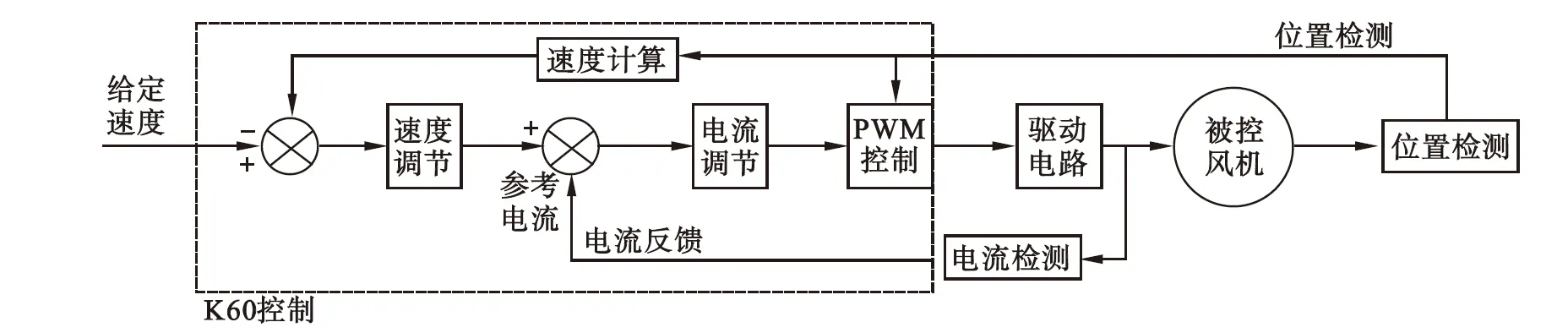
图1 无刷直流电机双闭环调速控制系统框图
Fig.1 Brushless DC motor double closed loop speed control system block diagram
2 系统硬件设计
硬件部分主要由K60微处理器控制电路、IR2130驱动电路、三相全桥逆变电路、外部RAM扩展电路和液晶显示电路等几部分组成,系统硬件电路如图2所示.
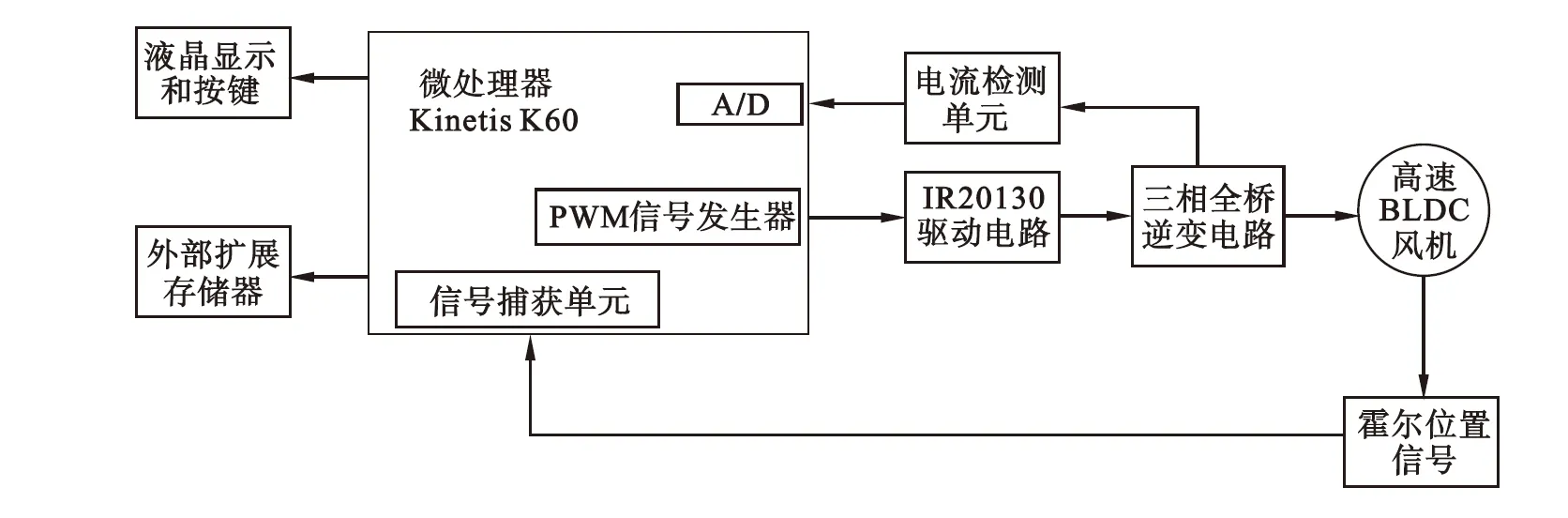
图2 系统硬件电路框图
Fig.2 The system hardware circuit diagram
2.1 器件选择
睡眠呼吸机的电机控制有非常复杂的要求,首要的需求就是MCU处理能力,基于ARM Cortex-M4内核的Kinetis K60 MCU 内部有Flex Timer(FTM)和快速精确的ADC等模块,完全能满足BLDC控制时成对PWM的输出、霍尔信号的捕捉和电流反馈信号采集等要求.驱动电路部分选择IR公司生产的IR2130高性能三相桥式驱动器来驱动三相全桥电路,不仅能同时输出6路驱动信号,还有完善的保护功能设计,使整个系统更为简单可靠.
2.2 IR2130驱动电路
在无刷直流电机的控制中驱动电路是硬件设计所要解决的关键.图3是IR2130外围驱动电路,由K60微处理器产生的6路PWM脉冲信号作为IR2130的6路输入,分别接至HIN1、HIN2、HIN3和LIN1、LIN2、LIN3引脚,经IR2130功率放大后通过HO1、HO2、HO3高压侧引脚和LO1、LO2、LO3低压侧引脚再经限流电阻分别接至T1、T2、T3、T4、T5、T6六个MOSFET的栅极来控制功率管的通断[2].值得注意的一点,由于全桥电路中同一桥臂上下两个功率管不能同时导通,所以用来控制同一桥臂上下两个功率管的PWM信号应为完全互补的PWM输出,K60的FTM模块就专门为电机控制等电子电力技术行业量身打造了互补模式PWM输出的功能.本设计选择FTM0_CH0~FTM0_CH5 六个通道来提供3对互补的PWM,互补模式下,通道2n和通道2n+1输出互补波形,所以接入IR2130输入端的K60引脚分别是FTM0_CH0、FTM0_CH2、FTM0_CH4、FTM0_CH1、FTM0_CH3、FTM0_CH5.
IR2130具有完善的保护功能设计,对其外围电路器件的选择也有很多要求,针对呼吸机用无刷直流电机控制时的设计要点如下:
(1) IR2130为反向负逻辑控制,即IR2130的6路输入信号任何一个为低电平时,其相应的输出为高电平,在软件控制PWM占空比时会注意到.
(2) 栅极限流电阻可采用十几到几十欧,通常在MOSFET栅极串一个51 Ω,额定功率为0.25 W的电阻.
(3) 自举电容的容量取决于被驱动功率器件的开关频率,占空比及充电回路电阻,这里取值0.1 μF即可.
(4)R3、R4、R5组成了过流检测电路,其中R5是过流取样电阻,相当于廉价的电流传感器,选用了0.1 Ω、3 W的精密水泥电阻,可保证散热效果和精度.而R3和R4则作为分压电阻,根据系统设计对VS0和ITRIP引脚的要求进行分压,使过流发生时ITRIP引脚的输入电压大于0.5 V,从而使IR2130内部的故障处理逻辑能够迅速封锁6个功率管的输入信号,同时FAULT引脚输出低电平,完成过流保护功能.
(5)R6、R7则与 CA-、VSO、CAO引脚内部相连的运算放大器共同构成采样信号放大电路,将采样电压信号放大到单片机输入信号范围值0~3.3 V之间.
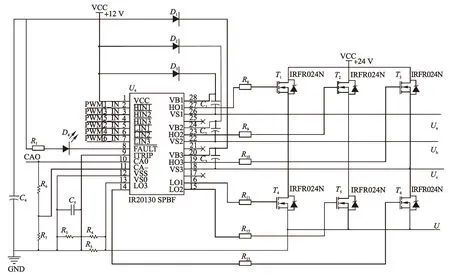
图3 IR2130驱动电路
Fig.3 IR2130 drive circuit
3 双闭环控制算法设计
采用速度和电流双闭环控制方法完成对电机的稳定控制.速度环作为外环和主调节器,主要起稳定转速和抗负载扰动作用;电流环作为内环和辅助调节器,主要起稳定电流和抗电网电压波动等作用[3].
3.1 速度环
整个速度环共有3个霍尔传感器,如图4所示,分别为HA、HB、HC.每一个霍尔传感器都会产生180°脉宽的输出信号,3个霍尔传感器的输出信号差120°,电机转一圈即360°正好对应6个上升或下降沿,即6个换相时刻.电机实际转速通过进入捕获中断程序后,相邻2次换相时间间隔算出.
(1)
其中:系统时钟为100 MHz;S为计数器分频;Tcount为计数器值;P为电机极对数.本设计中呼吸机使用的是微涡轮风机,极对数为1,额定电压为24 V,最高转速为60 000 r/min,低速模式时速度为3 000 r/min,相当于最高转速的5 %,就相当于每0.000 167~0.003 3 s换相一次.
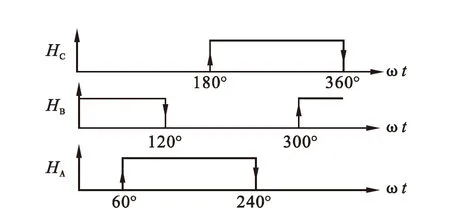
图4 霍尔位置信号波形
Fig.4 Holzer position signal waveform
3.2 电流环
在驱动电路设计中提到,由于IR2130完善的功能,其内部自带了运放电路,无需电流采集模块,直接通过CAO引脚与单片机的AD接口相连,即可完成相电压信号采集,再除以采样电阻,最后得到的就是相电流.
电流采样在每一个PWM周期都进行一次,但采样时刻要选择好.本设计采用单极性PWM控制,采样电流时刻最好是在PWM周期的“开”期间(功率管导通)的中部,并进行AD转换,避免在功率器件关断时采样电流,从而大大提高电流采样精度.
3.3 PID算法处理模块
由于K60芯片的高速处理能力,速度PI调节和电流PID调节在AD中断模块中完全可以完成.速度PI调节周期为100 ms,PI调节使用增量式数字PI算法,算法如下所示[4].
Es(k)=nref-nf
(2)
ΔEs(k)=Es(k)-Es(k-1)
(3)
us(k)=us(k-1)+KSiES(k)+KSPΔES(k)
(4)其中:nf为转速测量值;nref为转速给定值;Es(k)为速度误差;us(k)为速度调节器的输出;KSP为速度环比例增益系数;KSi为速度积分增益系数.
速度调节器的输出为电流调节器的给定电流(为保证流过电机的电流不超过最大电流,需要对速度调节器的输出进行限幅处理).速度PI完成后执行电流采样和电流PID调节,采用增量式数字PID控制算法,电流环调节与PWM同周期.算法如下所示[4].
Ei(k)=iref-if
(5)
ui(k)=ui(k-1)+KipEi(k)-KiiE(k-1)+KidEi(k-2)
(6)
其中:if为电流测量值;iref为电流给定值;Ei(k)为电流误差;ui(k)为电流调节器的输出;Kip为电流环比例增益系数;Kii为电流环积分增益系数;Kid为电流环微分增益系数.
经过电流PID调节后产生了一定占空比的PWM波.电流调节器的输出也需要经过限幅处理,电流环调整完之后,再调用PWM输出模块,输出新的PWM,实现对无刷直流电机的转速控制及限流保护[2].
4 软件系统设计
基于K60的有位置传感器无刷直流电机控制系统软件主程序流程图如图5所示.首先为初始化模块,它既包括软件中的变量初始化,还包括系统时钟、I/O端口状态、看门狗、系统中断等硬件系统的初始化,过程中为防止意外的中断请求,应该先关闭所有中断,待初始化完成之后再打开[3].然后设置定时器,利用定时器产生所需的采样周期.接着进入循环等待,如果接收到定时中断信号,程序则转入定时中断程序[3].
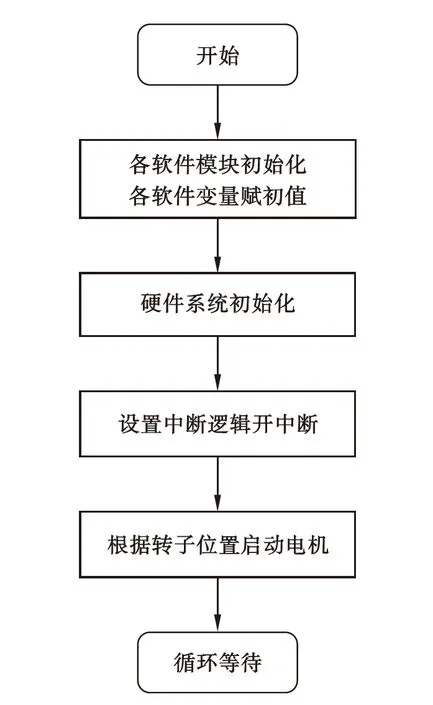
图5 主程序流程
Fig.5 The main program flow chart
定时中断子程序流程如图6所示.进入中断程序后,首先进行保护现场,然后利用K60 FTM模块的捕获功能,捕获霍尔位置传感器的转子位置信息,求出转速.接着计算AD模块的采样电流值,就可以确定换相时间、采用速度PI和电流PID双闭环算法调整PWM控制信号和开关管导通的顺序.执行完所有任务后即可恢复现场,退出中断服务子程序[3].

图6 中断子程序流程
Fig.6 Interrupt subprogram flow
5 实验验证与结论
本文设计了一个由基于ARM Cortex-M4内核的Kinetis K60高速单片机控制的直流无刷电机控制系统,其中被控电机为睡眠呼吸机中使用的微涡轮风机,极对数为1,额定电压为24 V,额定功率为32 W,最大转速为60 000 r/min.实验将通过霍尔传感器的输出信号经串口发送到计算机,并利用LabView编写的程序采集信号频率并存储,最后在MATLAB上绘制出转速曲线图.为适应不同病人的需求,保证病人佩戴面罩的气压可在0.4~2.0 kPa[5]的范围内调节,要求转速在30 000~50 000 r/min之间.图7为转速30 000 r/min和转速50 000 r/min时的速度曲线.
从图7可以看出:电机启动时基本保持以最大转矩加速到达指定转速的时间比较短,并且转速超调量较小,速度曲线比较理想.在给定转速为30 000 r/min和50 000 r/min时达到稳态的时间分别为0.48 s和0.57 s,稳态运行误差和调速误差≤5 %,达到了启动性能要求.
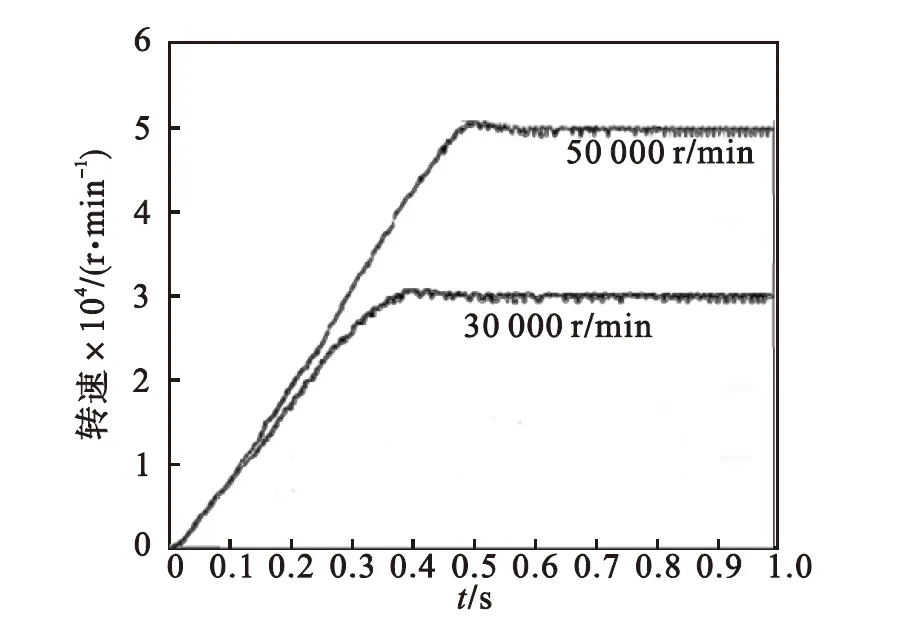
图7n=30 000 r/min及n=50 000 r/min时的速度曲线
Fig.7 Velocity curves ofn=30 000 r/min andn=50 000 r/min
上述速度曲线的获得验证了本文提出的基于K60控制直流无刷直流电机的方案可行,既解决了传统BLDC专用控制集成芯片的局限性又降低了DSP控制的成本,真正实现了性能良好、低成本的睡眠呼吸机的研发意义.
[1] 飞思卡尔Freescale公司.呼吸机的无刷直流电机控制[J].Beyond Bits电机控制专刊,2014(8):49-50.
[2] 王晨阳.基于DSP的呼吸机用无刷直流电机控制系统的研究[D].长沙:国防科技大学,2007:30-56.
[3] 夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009:59-216.
[4] 程武山.智能控制理论与应用[M].上海:上海交通大学出版社,2006:30-150.
[5] 张少锋,高艳霞,徐妍萍,等.用于便携式呼吸机的无位置传感器无刷直流电机控制系统[J].电气传动自动化,2009,31(4):23-28.
Brushless DC Motor Control System Based on Sleep Respirator
LIU Xiao-mei, LI Ou, WEI Li-feng
(Shenyang University of Chemical Technology, Shenyang 110142, China)
Aiming for the treatment of sleep apnea syndrome(OSAS) sleep respirator,the system scheme of controlling Brushless DC motor based on the K60 high speed SCM.is put forward.The brushless DC motor is control led by IR2130 drive three-phase full bridge circuit,The parts of the software design process and the double closed-loop control method are described.The experimental results show that The rotate speed of the motor can be controlled steadily,Which verifies the feasibility and the real-time performance of the system.
sleep breathing machine; brushless DC motor; K60 microprocessor; dual closed loop control
2014-10-18
刘晓梅(1964-),女,辽宁锦州人,副教授,主要从事智能测控技术与装置,无线传感器网络的研究.
2095-2198(2016)04-0372-06
10.3969/j.issn.2095-2198.2016.04.017
TM33
A
猜你喜欢
大电机技术(2022年5期)2022-11-17
现代仪器与医疗(2022年2期)2022-08-11
现代仪器与医疗(2022年2期)2022-08-11
现代仪器与医疗(2021年5期)2021-12-02
世界最新医学信息文摘(2021年12期)2021-06-09
电子制作(2017年1期)2017-05-17
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09
淮南师范学院学报(2015年3期)2015-03-22
