
面向视觉测量的相机标定误差分析
2016-02-09 08:27王振伟刘双印胥任杰
实验科学与技术 2016年6期
凡 芳,王振伟,刘双印,胥任杰
(电子科技大学 航空航天学院,四川 成都 611731)
面向视觉测量的相机标定误差分析
凡 芳,王振伟,刘双印,胥任杰
(电子科技大学 航空航天学院,四川 成都 611731)
该文分析了影响CCD相机标定参数精度的一些主要因素,并分析了在这些因素影响下相机标定结果。同时,分析了光照条件对角点检测精度的影响。实验表明,在保证角点坐标精度的前提下,标定板平面性对标定结果影响较大,图像数量取12~20幅比较合适。实验结果对相机标定中标定板的合理选择和制作、图像数量的选取、获得稳定的标定结果提供了有效参考。
电荷耦合相机标定;误差;因素分析;实验结果
相机标定是面向视觉测量和图像三维重建中最关键、最基本的一步,相机参数的精度严重影响着三维重建和视觉测量的精度。在传统的相机标定方法中张正友平面标定法[1]具有标定板制作简单、精度高等优点,因此应用范围广泛。为了获得稳定的标定结果,进一步提高标定结果的鲁棒性和实时性,有必要对其进一步分析。
在传统标定方法中,影响标定参数精度的因素有很多,主要包括标定板平面性、世界坐标测量精度、角点像素坐标精度、标定图像数量、图像拍摄角度等[2-4]。本文以Matlab中的相机标定工具箱为基础,主要研究了棋盘标定板的平面性和世界坐标精度、光照条件对特征点检测的精度影响、图片数量等对相机标定结果内外参数的影响。
1 线性相机模型
相机标定的理论基础运用的是相机的成像模型,这种模型最简单的解释就是针孔模型。在该模型中涉及4套坐标系:世界坐标系(Ow,Xw,Yw, Zw)是物体点Pw的三维世界坐标,由用户自定义;相机坐标系(Oc,Xc,Yc,Zc)是以相机光心为原点,垂直于图像平面的光轴为Z轴,X轴和Y轴平行于图像平面的坐标系[5];图像物理坐标系(O,X,Y)是物体点投影到相机成像平面的物理二维坐标系;图像像素坐标系(O,U,V)是物体点投影在成像平面的像素表示坐标系。世界坐标系物体点Pw转换到图像像素坐标系可由齐次坐标表示为[6]:
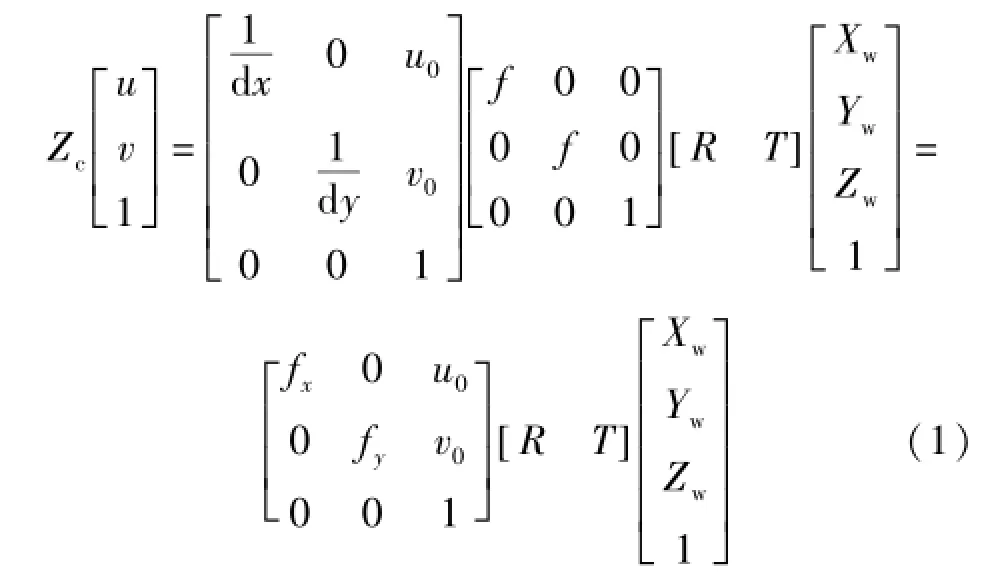
式中:d x、d y表示相邻像素之间X方向和Y方向的距离;(u0,v0)表示图像平面的中心像素坐标;fx、fy表示相机标定所得有效焦距;R为世界坐标到相机坐标的旋转矩阵;T表示世界坐标到相机坐标的平移矩阵。所谓相机的内部参数,即fx、fy、u0、v0;外部参数,即R、T。
本文以张正友平面标定法为分析基础,张氏标定方法中采用了平面棋盘格作为标定板,使Z=0,通过求取图像平面和棋盘标定板间的单应性矩阵获得相机内参,单应矩阵表示如下:

式中:M表示相机3×3内参矩阵;r1、r2分别是外参R的第一列和第二列;t是外参平移矩阵。图像平面和标定板之间的单应性可表示为:
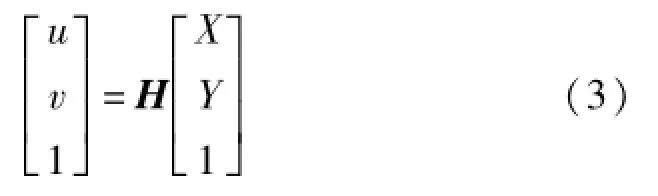
通过对棋盘标定板从不同视角拍摄多幅图像就可求得多个单应性矩阵,利用最小二乘法可以求得相机内部参数矩阵,进而由单应性方程求得相机外部参数[7]。
2 标定误差因素分析
2.1 光照条件对特征点测量精度的影响
由单应性式(3)可知,特征点像素坐标提取精度直接影响单应性矩阵的计算精度。针对本文标定方法中的棋盘角点检测,采用投影网格的方法,利用Harris角点检测原理对角点位置迭代求精并求得亚像素坐标[8-9]。该方法对棋盘特征点的提取精度较高,可以忽略角点检测算法对检测精度的影响。因此本文主要分析外部光照条件对图像本身的影响而带来的角点检测误差。
不同光照条件采集图像的亮度是不同的,那么图像的灰度值也会跟随变化。Harris角点检测的基础就是图像灰度强度的二阶导数,即图像像素点灰度值的变化率。所以理论上,光照条件变化会对角点检测精度产生一定影响。
2.2 标定板平面性和世界坐标精度的影响
由式(3)可知,单应性矩阵的计算中,必须用到棋盘标定板上角点的世界坐标值。制作标定板时,总是假定打印的棋盘格是等边长的。但是,由于普通打印机精度不够,造成标定板测量误差,势必会对标定结果产生影响。文献[4]对此项影响因素进行了验证并得出结论:当误差水平小于1.5时,重投影误差小于一个像素;当误差水平大于2时,投影误差则迅速变大。
其次,从式(2)和式(3)可知,计算单应性矩阵H的前提是保证特征点世界坐标值Z=0,即标定板必须是平面,否则将直接影响角点坐标和世界坐标点的对应精度。因此标定板的平面性也会对标定结果产生直接影响。本文的实验验证部分也主要对此因素进行了分析。
2.3 图片数量对相机标定精度的影响
在张氏标定法中,要求棋盘变换不同的姿态拍摄多幅图像。一幅图像就是一个视场,可以唯一确定一个单应性矩阵H。图像数量就是单应性矩阵数量。每个单应性矩阵可以确定2个关于内参M的独立约束方程[10],而内参矩阵M中有4个未知量,因此至少需要2个独立的单应性矩阵H确定4个独立约束方程,这样就可以求得相机内参。实际中,为了获得稳定的结果,通常采集远远超过2幅图像。
由以上分析可知,如果采集图像不足,明显会对内参计算带来一定误差;但是采集过多图像又会造成误差累计、错误概率增加而影响标定精度。因此,对用于标定的图像数量必须加以考虑。
3 实验验证
为进一步精确分析影响相机标定的各项因素,本文采用维视公司的MV-EM120C型号的CCD工业相机为标定对象。该型相机分辨率为1 280×960,焦距为12~36mm,像素尺寸为3.75μm×3.75μm。实验所用棋盘标定板一个为72 mm×78 mm的工业级标定板,有12×13个棋盘格,精度可达1μm;另一个为70 mm×80 mm的自制非平面性标定板,有7×8个棋盘格。
3.1 光照条件对特征点检测精度的影响
由于特征点的检测精度和棋盘平面性无关,该项实验采用的标定板为7×8棋盘格,在不同光照条件下共采集了8幅图像。其中4幅如图1所示。
对每幅图像运用Matlab标定工具箱中的角点检测算法,检测图像中6×7个角点坐标,并对每个角点在不同光照条件下的坐标求其标准差,结果如图2所示。
由图2可知,各个角点在不同光照下坐标标准差最大值为0.14,最小仅为0.05,该结果表明角点坐标值在不同光照下可以认为是稳定的。由此得出光照不会对特征点检测带来误差,也就是说标定相机时,在角点检测算法选择适当的情况下,可忽略光照的影响对特征点检测带来的误差。
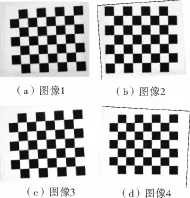
图1 不同光照下采集的图像
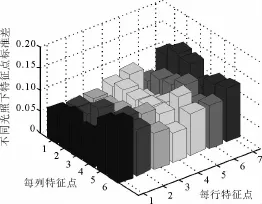
图5 不同光照下各角点坐标标准差
3.2 标定板平面性的影响
对于平面性的验证,本文采用了自制的非平面标定板和工业级标定板标定结果进行对比,相机物理焦距调为12 mm,标定结果对比如表1所示。

相机参数非平面标定板工业级标定板fx 538.92 460.18 3 301.47 3 204.3 fy3 309.61 3 204.6 u0/像素556.8 620.38 v0/像素
根据所用工业标定板标识参数可以计算出有效焦距为12 mm/3.75μm=3 200。可见工业级标定板得出的结果精度很高,与标识误差仅为0.1。和表1结果对比分析可知,由非平面标定板得出的有效焦距fx和fy与工业级标定板得出的结果误差达到了3,而主点误差最大达到了15。因此,标定板平面性严重影响了标定结果的精度。
3.3 图片数量对标定结果影响
为了验证图片数量对标定结果的影响,对标定板不同姿态拍摄了30幅图像,分别得到主点、有效焦距和图像数量的关系如图3和图4所示。

图3 图片数量与主点关系

图4 图片数量与有效焦距关系
从图3和图4曲线可以看出,实际标定时,若图片数量过少标定结果波动较大。当图片数量取12~20幅时,主点和有效焦距标定结果最稳定,波动在2个像素内,约0.1。而图片数量过大时,不仅使标定结果误差累计,而且造成标定速度变慢,影响算法实时性。
4 结束语
本文通过实际相机标定操作实验,研究了光照条件对角点检测的影响、标定板世界坐标测量精度和标定板平面性以及图片数量对相机标定精度的影响。实验表明,光照条件对角点检测精度造成的影响可忽略,建议相机标定时保证世界坐标测量精度在1以内,并且要保证标定板平面性,最好采集12~20幅图片实现高精度标定结果并保证标定速度。
[1]张广军.机器视觉[M].北京:科学出版社,2005.
[2]ZHANG Z Y.A flexible new technique for camera calibration[J].Transactions on Pattern Analysis and Machine Intelligence,2000,22(1l):1330-1334.
[3]胡楠,鲁光泉,荔涛,等.基于分布标定法的交通事故现场摄影测量精度实验分析[J].汽车工程.2008,30(7):557-559.
[4]尹洪涛,刘成.相机误差因素分析[J].信息通信,2012,117(2):28-32.
[5]TSAIR.An efficient and accurate camera calibration technique for 3D machine vision[C]//Proccedings of Conference Computer Vision and Pattern Recognition.Miami Beach,IEEE Press,1986:364-374.
[6]FAN Fang,WANG Zhenwei,LIU Shuangyin.3D reconstruction of weak texture surface based on binocular vision[C]//Proceedings of the 2016 3rdInternational Conference on Mechatronics and Information Technology.Shenzhen:Atlantis Press,2016:125-128.
[7]娄小平,郭美萍.双目视觉测量系统标定精度提高方法研究[J].北京信息科技大学学报(自然科学版),2010,25(1):16-20.
[8]HARRIS C,STEPHENS M.A combined corner and edge detector[C]//Proccedings of the 4thAlvey Vision Conference.Manchester:BMVA Press,1988:147-151.
[9]BOUGUET J Y.Camera calibration for Matlab[EB/L].[2016-08-11].http://www.vision.caltech.edu/bouguetj/calib_doc.
[10]于仕琪,刘瑞祯.学习OpenCV[M].北京:清华大学出版社.2009.
Analysis of Factors on Errors of the CCD Camera Calibration
FAN fang,WANG zhenwei,LIU Shuangyin,XU Renjie
(University of Electronic Science and Technology of China,School of Astronautics and Aeronautics,Chengdu,611731,China)
This paper analyses the main effect factors of parametric accuracy in CCD camera calibration.and the practical camera calibration results based on these factors.In addition,this paper analyses the effect of light condition for the accuracy of feature extraction.The results show that the measuring precision of the world coordinate has a greater influence on the camera calibration,and 12~20 is the suitable number of images.Our research provide effective reference for well selection and manufacture of calibrating board in camera calibration,well choice of the number of images,and for obtaining stability calibration results.
CCD camera calibration;error;factor analysis;result
TP751.1
A
10.3969/j.issn.1672-4550.2016.06.004
2016-09-12
国家自然科学基金(51675087);中央高校基础业务费(ZYGX2014J095)。
凡芳(1991-),女,硕士,主要从事三维型面的视觉测量和图像处理方面的研究。
猜你喜欢
中国机械工程(2022年8期)2022-05-09
中国机械工程(2021年8期)2021-05-07
汽车维修与保养(2020年11期)2020-06-09
音乐教育与创作(2019年8期)2019-05-16
电子技术与软件工程(2018年10期)2018-07-16
中国惯性技术学报(2017年1期)2017-06-09
电子科技(2016年12期)2016-12-26
光学精密工程(2016年3期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
