车载LIDAR技术误差分析与质量控制
2016-03-08 07:08张文君
西南科技大学学报 2016年4期
任 帅 张文君
(西南科技大学环境与资源学院 四川绵阳 621010)
车载LIDAR技术误差分析与质量控制
任 帅 张文君
(西南科技大学环境与资源学院 四川绵阳 621010)
为了使车载LIDAR技术的测图精度达到大比例尺基础测绘的质量标准,重点研究了该系统的误差成因及其对点云精度的影响,提出了一套完整的适用于大比例尺测图的车载LIDAR系统的误差控制方案。通过将1:500数字线划图成果与全站仪检测数据进行对比,统计分析了车载LIDAR系统的测图精度,验证了该误差控制方案的可行性,突破了新技术应用于带状大比例尺地形图测绘的质量难题,缩短了外业工作时间、降低了成图周期,为建立车载LIDAR技术“高效率、全天候、小外业、大内业”的测图模式提供借鉴。
车载LIDAR系统 点云 精度 误差来源
车载LIDAR(light detection and ranging,LIDAR)技术是通过整合动态差分GPS、高精度惯导系统、激光测距仪、成像系统等新型测绘技术于移动载体上,快速采集道路和周边地物的点云与像片的测量系统。随着GPS技术、惯性导航技术、激光测距技术及CCD技术的不断发展,车载LIDAR技术已成为城市规划、空间数据更新的一种重要手段。
由于在LIDAR系统中激光测距仪与IMU参考中心并不完全重合,POS与激光测距仪坐标系并不完全平行,使得系统存在偏心距误差和安置角误差,这些系统误差对后期数据解算精度产生直接影响。本文以车载LIDAR系统快速生成城市大比例尺地形图案例为基础,研究了系统误差的成因及对点云精度的影响,制定了相应的精度控制方案,并将得到的成果与传统测绘成果进行对比分析,验证了LIDAR误差控制方案的可行性。
1 车载LIDAR的定位原理
当测量车保持一定速度匀速前进时,由激光测距系统与CCD相机获取地物三维数据与纹理信息,GNSS与IMU测量并获取系统的位置与姿态信息,并利用地面基站同步观测数据校正车载数据,以确定系统的瞬时位置和运行轨迹,最终解算出各激光脚点高精度三维空间直角坐标值[1]。各坐标系向WGS-84坐标系转换时所用的转换矩阵为:
式中,①为转换到WGS-84坐标系的点云三维直角坐标值;②为激光瞬时坐标系下的坐标向量;③为扫描仪激光发射参考中心与惯导中心的偏差值;④为惯导中心与天线相位中心的偏差值;⑤为天线相位中心;RW,RG为与当前位置相关的坐标转换旋转矩阵;RN为与实测姿态角相关的旋转矩阵;RL为与扫描角有关的旋转矩阵;RM为安装误差旋转矩阵。车载LIDAR坐标转换原理见图1。

图1 车载LIDAR坐标转换原理图Fig.1 Schematic diagram of vehicle LIDAR coordinate transformation
2 误差构成及分析
根据上述定位原理可知,按误差来源可将点云误差分为以下几个方面:测量误差、系统集成误差、内业处理误差。
2.1 测量误差
2.1.1 激光测距仪的测量误差
(1)系统误差分为由元器件本身的缺陷导致信号在元器件之间的传输过程中出现的传播延迟和回波幅值波动引起的时刻鉴别误差。
(2)随机误差分为计数量化误差(扫描仪发射的脉冲信号及回波的到达时间和计数时钟并不完全同步,使得信号飞行时间与计数器时钟之间存在随机的时间差)和晶体振荡器振荡误差(在实际工作中,扫描仪中的晶体振荡器受到温度变化的影响而使基准频率不稳定,从而直接影响计数器时钟频率的稳定性,最终降低测量的时间间隔的精度)。
2.1.2 GNSS定位误差
(1)由GPS卫星设备引入的误差。包括卫星钟差(主要由瞬时的卫星钟速、卫星钟漂移率和随机误差导致的钟差三部分组成)和卫星轨道误差(包括因卫星与接收机在运行速度和地球引力位方面的差异导致的相对论效应、卫星质心与其天线相位中心的偏移)。
(2)由信号传播路径引入的误差。包括对流层延迟(常用天顶方向的大气干、湿分量和相应函数计算因对流层气体湿度的差异导致的延迟误差)、电离层延迟(若将晚上的电离层效应偏移视作常量,白天的偏移视作余弦函数,将其代入Klobuchar模型即可解算出电离层延迟误差)、地球自转效应(地球自转引起的距离偏差可用测站坐标、卫星坐标和地球自转角速度求出地球旋转参数改正值)。
(3)由接受设备引入的误差。包括多路径效应(接收机受周边地物反射信号的干扰而使其相位中心位置出现偏移)、天线的相位中心偏差(在实际工作中因接收信号强度和方位的变化而导致天线相位参考中心与其几何中心不一致)、观测误差(主要指测量时的分辨误差)。
2.1.3 IMU定姿定位误差
由于惯导系统各测量单元存在各种系统偏移、随机漂移和动态误差,使得姿态测量的精度受到影响,进而直接降低点云数据的定位精度。
2.2 系统集成误差
2.2.1 偏心距误差
由于车载LIDAR系统中各仪器坐标系之间的中心不同,导致在安装好后各坐标系之间存在平移误差。包括在激光测距系统和惯导系统的坐标系下,两者坐标原点之间的偏差值以及惯导系统坐标原点与GPS接收机天线相位中心之间的偏差值。
2.2.2 安置角误差
由于车载LIDAR系统中各仪器坐标系之间并不完全平行,导致在安装好后各坐标系之间存在角度误差。其中,各坐标系下的俯仰安置误差角、侧滚安置误差角和偏航安置误差角是解算角度误差的主要参数。
2.3 内业处理误差
2.3.1 时间同步误差
由于GPS采用的是GPS时,以原子时钟确保时间间隔的稳定性,而惯导系统以晶振频率作为计时基准,因而两者的计时基准不统一。另外,GPS接收机的数据接收频率一般为1 Hz,而惯导系统高达200 Hz以上的数据接收频率可获取更多定位信息。而且GPS接收机和惯导系统都会出现在数据采集与转换等过程中产生时延的现象,进而导致两者数据在卡尔曼滤波器中进行融合处理时融合时刻不同步。
2.3.2 内插误差
由于POS的测量轨迹频率为200 Hz,而扫描仪的输出频率为200 kHz,为了给每个扫描时刻匹配上对应的位置坐标和姿态信息,需要使用插值算法对POS轨迹数据进行处理,而内插引入的误差称为插值误差。
2.3.3 坐标转换误差
为了将点云数据从原始的激光扫描瞬时坐标系转换到WGS-84坐标系下,需要对数据进行多次坐标转换。而各个三维坐标转换模型在平差计算中受到泰勒级数展示式和旋转参数初值选取的影响,导致解算结果精确性降低。另外,重力异常因素也会使参考椭球面的坐标成果存在垂线偏差,降低坐标转换精度。
3 车载LIDAR系统误差控制方案
为了减弱车载LIDAR系统各传感器的测角误差、测距误差和系统集成误差等,在分析车载LIDAR系统的定位原理和误差源的基础上,详细设计了适用于大比例尺基础测绘的误差控制方案[1]。
3.1 测量系统校验
在将各部件装配在测量车前,需要对激光测距系统、惯导系统等传感器进行精密的单机检校,消除激光测距系统的测距、测角及与外界环境和反射物有关的影响,降低惯导系统随测量时间的增长而积累的测量误差。
(1)激光测距系统单机检校:采用精度较高的静态检校法,将激光测距仪分别转到0°,90°,180°,270°对室外唯一的明显标志点进行360°转动扫描,并各记录一组转台读数,然后求出点云中该标靶的相对移动扫描角度,最终拟合出该角度与转台旋转角度之间的差值与激光测距仪的误差参数。
(2)GPS测量误差校正:在GPS测量误差校正中,选择高配置GPS接收机降低接收机的钟误差和测量噪音;采用求差法降低电离层和对流层的延迟误差;而建立改正模型可降低卫星钟的钟误差、卫星星历误差与相对论效应误差。
(3)惯导系统检校:为了克服传统IMU“位置+速率标定法”中必须依赖高精度转台获取北向基准且实验步骤繁琐的缺陷,结合参考文献,本文采用一种无定向动静结合标定法[2],仅需获取水平基准和12次旋转试验,就能标定出惯导系统的陀螺标度因数、加速度计标度因数、常值偏置等全部误差系数。
(4)里程计检校:安装在车轮轴上的里程计(DMI)是定姿定位系统的重要技术之一,其测量值可辅助GPS导航解算,提高定姿定位精度。在精度要求较高的大比例尺测图中,一般采用固定路线长度检校法[3]对DMI的尺度因子进行检校。
(5)CCD相机检校:一般而言,相机内外方位元素不准确和相机的镜头畸变是CCD相机在车载LIDAR系统工作时引入误差的主要原因。采用基于四元数的光束条件平差法[4]对CCD相机进行检校,通过有限次迭代计算,可精确计算相机的内外方位元素和镜头畸变参数。
3.2 消除坐标转换误差
由于POS系统测得的车载位置和姿态信息(外方位元素)和POS与传感器之间的空间位置关系(内方位元素)直接影响激光脚点的坐标精度,因此,需要通过实验和实践的方式,确定车载LIDAR系统的内外方位元素,消除坐标转换的误差。
(1)内方位元素的室内标定:在内方位元素的标定中,激光测距仪坐标系和惯导系统坐标系的坐标原点之间的偏差、惯导系统中心与GPS天线相位中心之间的偏差可在实验室内通过全站仪测距测角的方法直接标定。而各传感器之间的安装角误差在室内测量难度较大,目前主要采用静态检校法,即扫描检校场内大量固定的控制点,并利用已知的同名点坐标求解安装角误差。此方法在实际大比例尺快速测图的情况下效率不高,本文通过两次扫描竖直墙面,计算各扫描激光束产生的倾斜偏差值,对激光测距系统进行检校[5]。
(2)外方位元素的动态标定:POS数据是解算移动载体位置和测量姿态的基础数据,其定姿定位精度直接影响点云数据的精确度。采用上述基于竖直墙面的激光扫描动态检校法可减少标定场的布设难度,提高标定的效率。
3.3 GPS差分结果与惯导IMU数据处理
为了提高车载POS数据的精度,可将解算后的GPS差分结果与惯导IMU数据进行紧藕合处理,再经过RTS平滑处理,得到高精度的移动载体位置坐标和姿态信息。
3.4 GPS信号失锁路段用全站仪补测特征点
车载LIDAR系统测量的主要误差源是DGPS定位误差[6]。当GPS信号较好时,系统测量数据的高程精度可达2 cm,平面精度可达5 cm;但GPS信号失锁后(比如测量车通过隧道、立交桥、天桥、高大建筑物和植被),定位精度显著降低。根据卡尔曼滤波原理,可在信号失锁路段用全站仪补测该区域的特征点,再利用航迹文件中的时间信息和姿态参数,反算出航迹控制点,提高航迹解算精度。特征点的选择如图2所示。
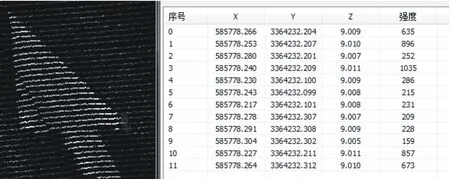
图2 道路地标特征点的选择Fig.2 Choice of characteristic points of road landmark
4 试验分析
4.1 坐标系转换
由于城市大比例尺测图通常采用地方坐标系,因此需要利用四参数转换模型和高程拟合模型,将原始的激光扫描瞬时坐标系转换到最终的当地直角坐标系。
四参数转换公式为:
高程拟合公式为:
z=Z+k0+k1X+k2Y+k3X2+K4Y2+K5XY
4.2 城市1:500地形图测绘
首先,将车载LIDAR系统在标定场内进行外方位元素的标定,具体标定内容如误差控制方案所示。然后按照相关测图技术规范中有关1:500测图的精度规定,对试验区内道路两侧50m内全要素进行采集,包括建筑物、道路及附属设施、管线设施、独立地物、陡坎等。车载LIDAR系统获取的各视图模式下的点云数据见图3。

图3 部分路段的俯视图与左侧视图Fig.3 The top and left views of some roads
4.3 成果对比

表1 抽样点与检测点的平面精度对比Table 1 Plane accuracy comparison of sample points and check points

表2 抽样点与检测点的高程精度对比Table 2 Sampling inspection in the contour error statistics
5 结论
本文以车载LIDAR技术的定位原理为出发点,分析了该技术用于大比例尺测绘的精度影响因素,并从各传感器的误差源出发,针对大比例尺测图的特点和要求,设计了一套用于城市大比例尺测绘完整的误差控制方案,并通过试验对车载LIDAR系统获取的1:500地形图进行了精度分析,其中,平面中误差=0.081 1,高程中误差=0.025 2,测绘成果满足1:500地形图关于平面点位限差≤±0.25 m,高程点位限差≤±0.15 m的精度要求。本文的研究成果对建立车载LIDAR技术“高效率、全天候、小外业、大内业”的测图模式具有重要借鉴意义,提高了大比例尺基础测绘的工作效率,易于实现快速更新城市大比例尺地形图的目的。
[1] 李德仁,袁修孝.误差处理与可靠性理论[M].湖北武汉:武汉大学出版社,2012.
[2] 刘百奇,房建成.一种改进的IMU无定向动静混合高精度标定方法[J].仪器仪表学报,2008,29:1250-1254.
[3] 李鑫. 车载移动测量系统误差分析与检校方法研究[D].河南郑州:解放军信息工程大学,2012.
[4] 郭波,屈孝志,黄先锋,等.车载移动立体测量系统检校及精度分析[J].激光与红外,2011, 41(11):1205-1210.
[5] 田祥瑞, 徐立军, 徐腾,等. 车载LIDAR扫描系统安置误差角检校[J]. 红外与激光工程, 2014, 43(10):3292-3297.
[6] 刘宁. 车载LIDAR航迹解算精度提高方法研究[D]. 河南焦作:河南理工大学, 2011.
Error Analysis and Quality Control of Vehicle-borne Lidar Technology
REN Shuai, ZHANG Wenjun
(SchoolofEnvironmentandResources,SouthwestUniversityofScienceandTechnology,Mianyang621000,Sichuan,China)
In order to make the measurement precision of vehicle LIDAR technology to meet the quality requirements of large-scale basic surveying and mapping, this paper analyzed the causes of the systematic error and its impact on the point cloud precision, thus putting forward a complete set of error control solution for the vehicle LIDAR system applicable to large-scale surveying and mapping. By comparing the results of the 1:500 digital line graphic (DLG) operation and the test data of the electronic total station, the measurement precision of the vehicle LIDAR system was analyzed and the feasibility of the corresponding error control solution was verified. The new set of error control solution greatly helps the vehicle LIDAR technology to apply to the large-scale topographic surveying and mapping, therefore shortening the field working hours and reducing the mapping cycle.
Vehicle LIDAR; Point cloud handing; Precision verification; Source of error
2016-05-12
四川省教育厅重点项目(15ZA0120);四川矿产资源研究中心项目(SCKCZY2014-YB10)。
第一作者,任帅(1991—), 男,硕士研究生,E-mail:373225272@qq.com;通信作者,张文君(1970—),男,博士,教授,研究方向为遥感技术、地理信息系统,E-mail:113999066@qq.com
P21;TN959.3
A
1671-8755(2016)04-0057-06
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
汽车维修与保养(2020年11期)2020-06-09
测绘通报(2019年4期)2019-05-10
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
同济大学学报(自然科学版)(2018年11期)2018-12-04
北京航空航天大学学报(2018年1期)2018-04-20
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
传媒评论(2017年2期)2017-06-01