
光纤惯导系统连续旋转对准技术研究
2016-03-16 03:04何长久邹志勤高伟熙
导航定位与授时 2016年2期
何长久,邹志勤,邹 瑛,高伟熙
(北京自动化控制设备研究所,北京100074)
光纤惯导系统连续旋转对准技术研究
何长久,邹志勤,邹 瑛,高伟熙
(北京自动化控制设备研究所,北京100074)
初始对准是惯性导航的关键技术之一,对准结果会直接影响系统的导航精度。针对光纤陀螺惯导系统,缩短对准时间、提高系统对准精度等技术难点,开展了高精度光纤惯导系统连续旋转对准技术研究,深入分析了常值陀螺漂移、随时间变化的陀螺漂移、陀螺标度因数常值误差、陀螺标度因数不对称误差、陀螺安装误差、陀螺随机游走等误差项对系统对准精度的影响,对比了现有旋转方案的优点与不足,提出了一种改进的单轴二位置旋转方案。试验结果表明,在采用该旋转方案的情况下,对准时间8min方位角对准精度可达到30″(1σ),具有重要的工程应用价值。
惯导系统;旋转调制;误差分析;旋转方案
0 引言
光纤陀螺捷联惯导系统通常采用单位置或双位置对准方式[1]。近年来,随着旋转调制技术的发展,连续旋转对准方式成为光纤陀螺惯导系统实现高精度对准的有效技术手段[2-3],其通过IMU绕旋转轴作有规律的运动,使主要器件误差在旋转周期内受到调制,进而大幅提升系统对准精度和对准收敛速度,成为工程应用研究的热点之一。
为了缩短旋转调制惯导系统的对准时间,同时提高系统的对准精度,本文采用单轴旋转对准方案。文中对IMU系统的各类误差做了理论推导和仿真分析,为IMU系统器件选型提供了理论依据,通过对光纤惯导系统旋转对准[4-5]与单位置、多位置对准方案的数学仿真,比较了各对准方案的仿真结果。
1 对准误差分析

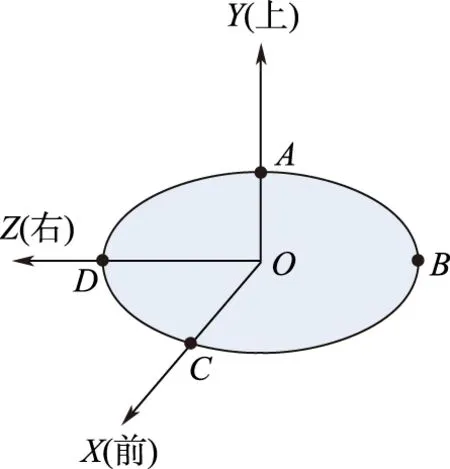
图1 载体坐标系示意图Fig.1 The vector diagram of the coordinate system
以一种典型的旋转方案为例,对IMU系统各误差项进行分析,典型旋转方案描述如下:
次序1:IMU从A点出发,顺时针旋转经过B点,到达位置C点,在C点处的停留时间为Ts;
次序2:IMU从C点出发,顺时针旋转经过D点,到达位置A点,在A点处的停留时间为Ts;
次序3:IMU从A点出发,逆时针旋转经过D点,到达位置C点,在C点处的停留时间为Ts;
次序4:IMU从C点出发,逆时针旋转经过B点,到达位置A点,在A点处的停留时间为Ts;
之后重复上述旋转过程。
1.1 常值陀螺漂移
将陀螺常值漂移偏置转换到b系(即n系),得到
(1)
推导可知,在一个旋转调制周期内,b系中等效陀螺漂移平均值可表示为
(2)
分析式(2)可知:经过旋转调制后,影响对准精度的主要因素——水平陀螺漂移被调制平均为零。
1.2 随时间变化的陀螺漂移
假定陀螺随时间的漂移偏置为
(3)
将陀螺漂移转换到b系(n系)为
(4)
其中:
a1、b1、c1—为陀螺漂移随时间的一次系数,
a2、b2、c2—为陀螺漂移随时间的二次系数。
取ρ0=0,在一个旋转调制周期内,b系中等效陀螺漂移为
(5)
分析式(5)可知:在一个旋转周期内,东向、北向随时间变化的陀螺漂移经过旋转调制后,调制为与时间无关的常值漂移,但是天向陀螺漂移保持不变。
1.3 陀螺标度因数常值误差
假定IMU系统中,x、y、z轴方向的标度因数常值误差为kx、ky、kz。
IMU系统在旋转周期内理论测量值为
(6)
IMU系统旋转周期内实际输出值为
(7)
其中:
I为单位向量,
K=diag[kxkykz]为陀螺标度因数常值误差。
标度因数常值误差引起的测量误差为
(8)
IMU系统只存在陀螺标度因数常值误差时,经过旋转调制后,被调制平均为
(9)
分析(9)式可知:旋转调制技术对陀螺标度因数常值误差无调制作用。
1.4 陀螺标度因数不对称误差


(10)

标度因数不对称误差引起的测量误差为
(11)
IMU系统只存在陀螺标度因数常值误差时,经过旋转调制后,被调制平均为
(12)
分析式(12)可知:经过旋转调制后,陀螺标度因数不对称误差被调制平均为零。
1.5 陀螺安装误差
假定IMU系统中,x陀螺对y陀螺的安装误差角为Δδxy,对z陀螺的安装误差角为Δδxz;y陀螺对x陀螺的安装误差角为Δδyx,对z陀螺的安装误差角为Δδyz;z陀螺对x陀螺的安装误差角为Δδzx,对y陀螺的安装误差角为Δδzy。

(13)
安装误差角引起的角速度误差为
Δωb=ωb′-ωb
(14)
IMU系统存在陀螺安装误差时,经过旋转调制后,被调制平均为
(15)
分析式(15)可知:当固定旋转角速率时,减小旋转调制过程中的停留时间,可以减少安装误差。
1.6 陀螺随机游走
陀螺角速率测量噪声X(t)为均值为0的白噪声,满足:
E(X(t))=0
(16)
E(X(t)X(τ))=σ2δ(t-τ)
(17)
积分后造成的角度误差ε(t)应满足
(18)
即

(19)
有
E(ε(t))=0
(20)
假定对准时间为T,且假定对准过程中旋转周期为整数,则等效陀螺漂移为
(21)
(22)
其中,东向、天向、北向陀螺随机游走误差的方差为σx、σy、σz。
分析式(22)可知:陀螺随机游走漂移系数较大,且不可调制,因此应根据对准时间和精度的要求提出光纤陀螺随机游走的指标。
三轴加速度组合件测量误差表达式与三轴速率陀螺测量误差表达式具有相同的形式,因此,在经过单轴旋转调制平均后,在b系中表示的加速度测量误差与式(2)、式(5)、式(9)、式(12)、式(15)具有相同的形式,只是将式中的角速度变量改为对应的比力就可以了[5]。
2 连续旋转的实现方案
惯导系统通电启动后,开始自对准流程,且对准时间为8min;然而光纤陀螺在加电启动过程中,陀螺漂移对温度变化较为敏感,在此可以将随温度变化的陀螺漂移转变为随开机时间变化的陀螺漂移,因此需结合光纤惯导系统具体特点研究适合工程应用的连续旋转方案。
文中提出了一种改进的单轴二位置旋转方案,该旋转方案为控制旋转机构使IMU在图1中的A、C两位置间循环运动,其转动过程可以描述如下:
次序1:IMU从A点出发,顺时针旋转经过B点,到达位置C,停留时间为Ts;
次序2:IMU从C点出发,逆时针旋转经过B点,到达位置A,停留时间为Ts;
次序3:IMU从A点出发,逆时针旋转经过D点,到达位置C,停留时间为Ts;
次序4:IMU从C点出发,顺时针旋转经过D点,到达位置A,停留时间为Ts。
之后IMU按照次序1~4的顺序循环运动。在一个旋转周期内,IMU系统只在0°和180°位置上有停留,且这两个位置是互相对称的,IMU误差值相互抵消。与典型的单轴旋转方案相比,改进的单轴二位置旋转方案对随时间变化的陀螺漂移、速度补偿效果更好。
结合第1节误差分析可知,在IMU精度相同的情况下,为了提高惯导系统的对准精度,需要减小惯导系统旋转调制周期,可以通过以下两种方法实现:1)增大旋转调制角速率;2)缩短旋转调制在位置上的停留时间。但是,增加旋转速度会使y轴陀螺标度因数产生连续增长的方位误差。因此,连续旋转角速率确定需要在两项误差之间进行折中,经理论分析与试验验证,旋转角速率设定为18(°)/s。
以实际系统为例,IMU系统的转动惯量为:I=1.4043kg·m,电机最大输出力矩为:J=1.4N·m,旋转调制角速率为:ω=18(°)/s,所以IMU系统从正转至反转所需的最短时间为:ΔT=0.35s,若停止时间Ts设定为0.35s,旋转框架在启动和停止过程中都不稳定,影响系统的对准精度,因此,经过试验验证,将IMU的停留时间Ts设定为1s,在这种情况下,旋转框架能够平稳运转,对准精度得到很大改善。
3 仿真分析
3.1 仿真结果及分析
3.1.1 陀螺漂移偏置
设定IMU系统北、天、东三个轴方向陀螺漂移都为0.05(°)/h,IMU系统北、天、东三个轴方向陀螺随时间漂移都为0.01(°)/h:精对准仿真时间为8min,仿真结果如图2所示。
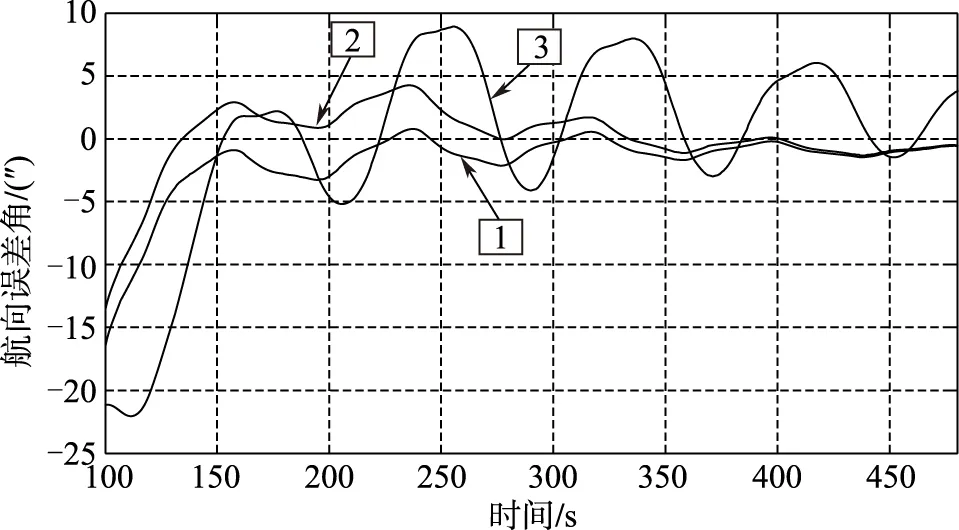
图2 陀螺漂移—航向对准误差角曲线Fig.2 The gyro drift-error curve of heading
图2中,曲线1为理想旋转调制式惯导系统航向误差曲线,系统在8min内的对准精度为1.0″以内;曲线2为三个方向陀螺附加常值漂移后的航向误差曲线,对准精度仍在1.0″以内;曲线3为系统附加陀螺随时间漂移后的航向误差曲线,对准精度为10.0″。可知:系统附加陀螺常值漂移时,精对准过程中滤波收敛时间不变,收敛精度不变,在旋转调制过程中,陀螺常值漂移几乎不影响对准精度;系统附加随时间变化的陀螺漂移时,精对准过程中滤波收敛时间增加,收敛精度降低,在旋转调制过程中,陀螺随时间漂移对对准精度有很大影响。
3.1.2 标度因数误差

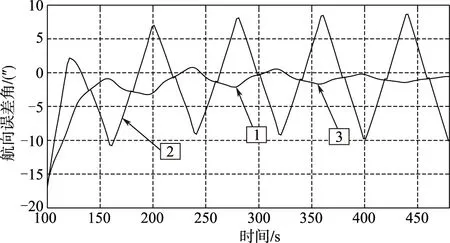
图3 陀螺标度因数—航向对准误差角曲线Fig.3 The gyro scale factor-error curve of heading
图3中,曲线1为理想旋转调制式惯导系统航向误差曲线,系统在8min内的对准精度为1.0″;曲线2为陀螺附加标度因数对称性误差后系统航向误差曲线,对准精度幅值在10.0″范围内振荡;曲线3为系统附加标度因数不对称性误差系统航向误差曲线,对准精度仍为1.0″。
3.1.3 安装误差
设定IMU系统北、天、东三个方向陀螺对x、y、z轴的安装误差都为:δ=10″,精对准仿真时间为8min,仿真结果如图4所示。

图4 陀螺安装误差—航向对准误差角Fig.4 The gyro misalignment-error curve of heading
图4中,曲线1为理想旋转调制式系统航向误差曲线,系统在8min内对准精度约为1″;曲线2为IMU系统附加安装误差时的系统航向误差曲线,系统对准精度约为3″。
3.1.4 随机游走

图5 陀螺随机游走—航向对准误差角Fig.5 The gyro random noise-error curve of heading
图5中,曲线1为陀螺理想状态光纤捷联惯导系统航向误差曲线,系统在8min内对准精度约为1.0″;曲线2为IMU系统附加陀螺随机游走系统航向误差曲线,对准精度约为10.0″。可知:陀螺存在随机游走误差项时,惯导系统的对准精度降低。
3.1.5 对准方案的比较

图6 航向对准误差角Fig.6 The misalignment angle of heading
图6中,曲线1为惯导系统单位置对准方案航向误差曲线,统计后系统对准精度在120′范围内振荡;曲线2为惯导系统二位置对准方案航向误差曲线,统计后系统对准精度在30.0′范围内振荡;曲线3为惯导系统按改进旋转方案对准后的航向误差曲线,统计之后系统对准精度在45.0″范围内振荡,仿真实践表明:采用连续旋转对准方案精度,相比之前的单位置对准、双位置对准有大幅度提升。
3.2 惯导系统对准精度测试
本文将旋转调制惯导系统水平放置于实验室转台上,分别锁定在方位角为0°、45°、90°、135°、180°、225°、270°、315°八个位置上进行对准测试,对准时间为8min。实验中,为了避免试验结果的偶然性,将惯导系统重新安装两次,测试结果如表1所示。
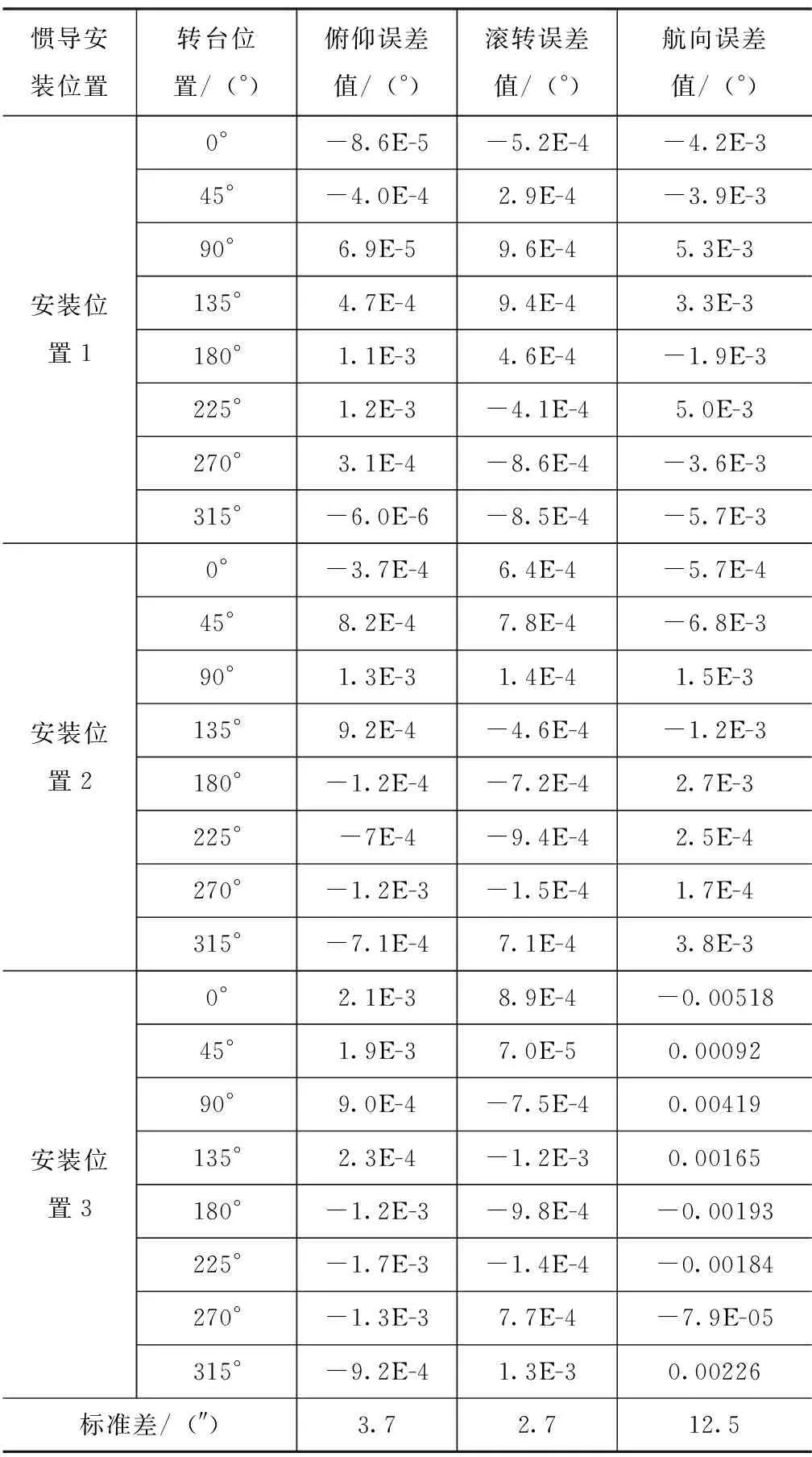
表1 惯导系统对准测试Tab.1 The test of INS alignment
从表1可知:惯导系统经过三个不同位置安装后,对准精度优于15″。
4 结语
本文对光纤陀螺惯导系统连续旋转对准方案的误差因素进行了理论分析和仿真,结合旋转调制惯导系统自身的特性,提出了工程可用的旋转方案。通过数学仿真对连续旋转对准方案与传统单位置对准、多位置对准方案进行了对比,结果表明连续旋转对准方案在收敛速度和对准精度方面均优于后两者,具有重要的工程应用价值。
[1] Li An,Chang Guobin,Qin Fangjun,et al.Improvedprecision of strapdown inertial navigation system brought by dual-axis continuous rotation of inertial measurement unit[C]//2010 2ndInternational Asia Conference on Informatics in Control,Automation and Robotics.2010:284-287.
[2] 高钟毓.惯性导航技术[M].北京:清华大学出版社,2012:224-253.
[3] Banerjee K,Dam B,Majumdar K,et al.An improveddither-stripping scheme for strapdown ring laser gyroscopes[J].IEEE Transaction on Aerospace and Electronic Systems,2004,7(2):54-59.
[4] 翁海娜,陆全聪,黄昆,等.旋转光学陀螺捷联惯导系统的旋转方案设计[J].中国惯性技术学报,2009,17(1):8-14.
[5] Yuan Baolun,Liao Dan,Han Songlai.Error compensation of an optical gyro multi-axis rotation[J].Measurement Science and Technology,2012,23(2):297-301.
[6] 可伟,乔海岩,孟凡强.船用激光陀螺惯导单轴旋转系统[J].舰船科学技术,2012,34(12):67-71.
Initial Alignment of Rotation-modulation Strapdown Inertial Navigation System
HE Chang-jiu,ZOU Zhi-qin,ZOU Ying,GAO Wei-xi
(Beijing Institute of Automation Control Equipment,Beijing 100074,China)
The initial alignment technology is one of the key technology of inertial navigation,and its precision will affect the navigation result.Studying of the initial alignment of rotation-modulation strapdown inertial navigation system in order to shorten the alignment time and improve alignment accuracy.Analyzing the errors of IMUs that impact the precision of navigation system,include the constant drift of gyro,the drift over time of gyro,the constant error of scale factor of gyro,the asymmetric error of scale factor of gyro,gyro misalignment,the random error of gyro and so on.Compare the advantages and disadvantages of the existing rotation scheme,proposed an improved single-axis rotation scheme second position.The result of experiment show that the heading error is less than 30″ after 8min initial alignment experiments in the scheme,the scheme has great merits in engineering applications.
Navigation system;Rotation modulation;Error analysis;Rotating scheme
2014-10-11;
2015-04-10。
何长久(1989-),男,硕士,主要从事惯性导航系统的初始对准技术的研究。E-mail:hechangjiuok@163.com
U666.12
A
2095-8110(2016)02-0001-06
猜你喜欢
电子工业专用设备(2022年1期)2022-07-13
舰船科学技术(2022年10期)2022-06-17
四川大学学报(自然科学版)(2022年1期)2022-02-10
数字海洋与水下攻防(2020年5期)2021-01-04
四川大学学报(自然科学版)(2020年3期)2020-06-03
宇航学报(2019年8期)2019-09-06
计算机应用与软件(2018年12期)2018-12-13
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2018年1期)2018-04-20
