
基于自适应网络的高精度玉米拾穗装置优化设计
2016-03-23 06:45郭素娜张学明刘志刚
农机化研究 2016年6期
郭素娜,张学明,刘志刚
( 1. 河南工业职业技术学院,河南 南阳 473000 ;2. 济源职业技术学院,河南 济源 459000;3.云南大学 软件学院,昆明 650091;4.南昌工学院,南昌 330108)
基于自适应网络的高精度玉米拾穗装置优化设计
郭素娜1,张学明2,刘志刚3,4
( 1. 河南工业职业技术学院,河南 南阳473000 ;2. 济源职业技术学院,河南 济源459000;3.云南大学 软件学院,昆明650091;4.南昌工学院,南昌330108)
摘要:为了提高玉米拾穗装置拾穗的准确性,减少漏摘率、断穗率、籽粒破碎率等玉米收割效率的不利因素,设计了一种新的高精度玉米拾穗装置。该装置利用玉米拾穗拉断力的变化对玉米拾穗过程的拾穗辊质心角速度进行准确监测,当产生漏摘率、断穗率、籽粒破碎时会发出警报,并利用计算机自适应网络原理,对拾穗辊的间隙进行自适应调节,提高了拾穗装置的拾穗精度。为了验证装置优化设计的合理性,采用试验、理论分析和数值仿真模拟的方法对装置的采摘效率进行论证,利用Pro/E软件建立了拾穗装置的三维建模,根据拾穗过程拉断力的增大引起的质心角速度变化,使用ADMAS软件对玉米穗拾穗过程的角速度进行了仿真模拟,得到了和试验相吻合的角速度值。将自适应高精度玉米拾穗装置和普通玉米穗采摘装置进行对比发现:高精度玉米穗采摘装置在降低漏摘率和断穗率方面都表现出了优良的性能,大大提高了玉米穗的采摘效率,为玉米自动化采摘机械的设计了技术参考。
关键词:玉米拾穗辊;拉断力;自适应;仿真
0引言
在我国,小麦是主要的粮食作物,玉米是仅次于小麦的粮食作物,然而在收获玉米方面的机械却不够完善,全国玉米的机械收获率达不到5%。因此,研制出结构先进、性能可靠的玉米收获机是目前的大趋所势,我国的玉米种植方面,种植规格存在各种差异,由于玉米收获机还不够完善,存在了多种缺点,如结构设计不够合理、性能方面不尽人意,以及出现了大量的漏摘率、籽粒破碎率、断穗率等多种问题,使得损失率过高。为此,本文利用仿真手段和试验研究对玉米拾穗装置的结构和原理进行研究分析,旨在对完善物理样机的试验和试制方面提供理论基础。
1玉米收割机设计框架
图1表示横卧式的玉米联合收割机,其主要构件是拾穗辊。计算机自适应网络算法是把自适应评价设计和强化学习的思想与动态规划原理相结合而提出的一种方法。本文利用这种算法思想设计了一种新的玉米辊间隙自适应调节方法,其总体框架如图2所示。

图1 卧式玉米收获机示意图

图2 玉米拾穗辊设计总体框架
玉米拾穗辊设计的总体框架的设计主要依据玉米穗收获装置在拉断玉米穗时的角速度值,判断是否存在漏拾或者碎粒的情况。如果存在漏拾及碎粒,则报警;然后,根据计算机网络自适应调节原理,对两辊之间的距离进行调节,输出合理的辊间距。其中,质心角速度的阈值通过试验和仿真模拟来确定,以提高设计的准确性。
2高精度玉米拾穗装置机械结构设计
玉米卧式拾穗装置主要由1对相对旋转的拾穗辊、传动箱和拾穗辊间隙调整等组成。拾穗辊是主要的机械结构,其设计关系到玉米拾穗的漏拾和碎粒效果。拾穗辊的主要结构如图3所示。

1.拨禾轮 2.喂入轮 3.拾穗辊 4.喂入辊 5.输送器
拾穗器主要由1对横卧式卧辊、喂入轮、喂入辊等组成。工作时,被割倒的玉米经输送器运到喂入轮和喂入辊的间隙中,继而向拾穗辊喂送。拾穗辊的结构如图4所示。

1.前轴承 2.拾穗机构的间隙调整机构 3.拾穗辊 4.传动箱
卧式拾穗辊的主要特点是结构简单、工作较可靠、寿命长。由于拾穗时茎秆的压缩程度较小,摘辊在工作时,当拾穗的拉引力大于玉米茎秆的阻力和玉米穗的摘断力时,果穗被碾拉断,落在摘辊的前方,其受力示意图如图5所示。

图5 玉米拾穗辊受力分析
假设拾穗辊的拉引力为Tjx,茎秆的阻力为Pjx,果穗的碾拉断力是Rb,则摘断玉米穗的力学条件为
2(Tjx-Pjx)>Rb
(1)
即
Pjμjcosα0-sinα0>Rb/2
(2)
Pj=Pjx/cosα0
(3)
则
Pjx(μj-tanα0)>Rb/2
(4)
其中,α0表示抓取角度,μj表示摘辊对茎秆的抓取系数。由于在拾穗过程中受到拉断力时,质心角速度会发生变化,因此可依据其中值的范围来断定漏拾或者碎粒的情况,质心角速度也可以通过数值仿真模拟来计算,从而可以提高装置设计的准确性。
计算机自适应网络算法是把自适应评价设计和强化学习的思想与动态规划原理相结合而提出的一种方法。本文利用这种算法思想,设计了辊间隙自适应调节方法。假设控制状态的方程为
(5)
其中,xm(t)表示控制状态的n维向量;ym(t)表示输出状态的n维向量;r(t)表示输入指令;Am、Bm表示n×n维和n×n维的系数矩阵;C表示n×n维的系数输出矩阵。假设计算机自适应网络可调系统的状态方程为
(6)
其中,As、Bs表示n×n维和n×n维的系数矩阵;xs(t)表示自适应调节下控制状态的n维向量;ys(t)表示自适应调节下输出状态的n维向量;u(e,t)表示自适应调下的输出。通过自适应调节,可以使自适应的控制误差为0,由此可得
e(t)=ym(t)-ys(t)
(7)
辊轴间隙的自适应条件过程就是根据参考模型的输出和可调系统输之差,确定一个u(e,t)使输出量接近参考量。
3高精度玉米拾穗装置测试
为了验证装置的有效性和可靠性,本研究采用试验和数值模拟的方法对机械装置进行验证,质心角速度阈值的确定主要使用传感器对其进行测量。为了验证测量的有效性,本文设计了装置测试的三维仿真模型,如图6所示。

图6 ProE三维仿真模型
在图6中,可以利用接口模块Mechanical/Pro,将模型导入到 ADAMS 界面下,对模型进行相关的仿真分析。
ADAMS中默认定义物体质量的方式是通过其几何形状来定义的,保留原几何体以表明柔性体的连接方式,如图7所示。同时,设置了玉米秸秆的基本三维模型,然后对玉米秸秆进行定位,如图8所示。
由图8可以看出:玉米果穗在从拾穗棍的导引段运动到拉茎段之前,已完成拾穗作业。这说明,在所设定的仿真参数条件下,仿真结果符合拾穗原理和实际工作中的情况。

图7 玉米秸秆定义

图8 定位过程
图9表示在理论分析、试验和仿真模拟3种情况下得到的质心角速度曲线。由图9可以看出:3种情况下得到的角速度曲线基本吻合,从而验证了数据的可靠性。为了验证装置的效果,对装置的断穗率和漏拾率进行了测试,结果如表1所示。

图9 质心角速度

测试编号传统拾穗装置断穗率自适应拾穗装置断穗率率13.250.12523.980.13234.320.14843.710.23153.630.122
由表1可以看出:使用自适应拾穗装置作用后,可以大大提高机械作业的生产效率,并有效降低了断穗率。
表2为传统拾穗装置和自适应拾穗装置的漏拾率对比。由表2可以看出:使用自适应拾穗装置作用后,大大降低了装置的漏拾率,从而验证了本文设计装置的有效性和可靠性。
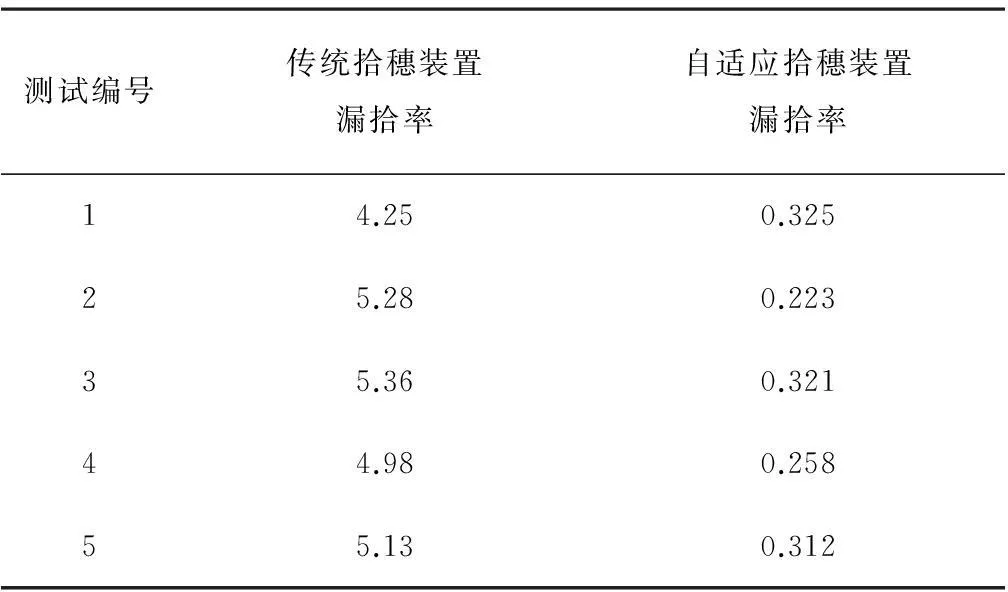
表2 拾穗装置漏拾率测试
4结论
1)依据玉米植株的物理特性和拾穗过程中的机械力学特性,结合计算机自适应控制原理,设计了一种新的玉米拾穗装置,可以有效降低玉米联合收获机作业过程中的漏拾率和断穗率。
2)使用Pro/E软件建立了玉米拾穗装置的三维仿真模型,并将其导入ADMAS软件进行了仿真模拟,得到了拾穗装置在收获玉米穗时的质心角速度,并将数据结果和试验结果对比,提高了装置优化设计的准确性。
3)对玉米拾穗装置的拾穗效果进行了试验,得到了自适应玉米穗拾穗装置的漏拾率和断穗率的相关数据。将其与传统装置进行对比发现:该装置可以有效提高玉米联合收获机的作业效率和作业质量,为玉米收获机械的设计提供了理论参考。
参考文献:
[1]李俊峰,介战. 联合收割机谷物损失测试研究探讨[J].农机化研究,2007(12):248-250.
[2]梁振伟,李耀明,赵湛,等.切纵流联合收获机夹带损失监测方法[J]. 农业工程学报,2012,28(S2):179-183.
[3]李耀明,梁振伟,赵湛,等.联合收获机谷物损失实时监测系统研究[J]. 农业机械学报,2011,42(S1):99-102.
[4]徐立章,李耀明,李洪昌,等.纵轴流脱粒分离-清选试验台设计[J]. 农业机械学报,2009,40(12):76-79.
[5]贺俊林,佟金,胡伟,等.辊型和作业速度对玉米收获机拾穗性能的影响[J].农业机械学报,2006, 37(3): 46-49.
[6]范国昌,王惠新,籍俊杰,等.影响玉米拾穗过程中籽粒破碎和籽粒损失率的因素分析[J].农业工程学报,2002, 18(4):72-74.
[7]郭玉明,袁红梅,阴妍,等.作物茎秆抗倒伏的力学分析及综合评价探讨[J].农业工程学报,2007, 23(7): 14-18.
[8]郭新宇,赵春江,肖伯祥,等.玉米三维重构及可视化系统的设计与实现[J].农业工程学报,2007, 23(4): 144-148.
[9]宋建农,王苹,魏文军,等.水稻秧苗抗拉力学特性及穴盘拔秧性能的力学试验研究[J].农业工程学报,2003, 19(6):10-13.
[10]袁红梅,郭玉明,李洪波.小麦茎秆弯折力学性能的试验研究[J].山西农业大学学报:自然科学版,2005, 25(2):173-176.
[11]李婉, 李尚平, 刘东美. 小型整秆甘蔗收获机械喂入机构仿真分析与试验研究[J].农机化研究, 2010, 32(7): 152-154.
[12]Takuyuki Y, Katsuaki S, Koki I, et al. Application of a Sugarcane Harvester for Harvesting of Willow Trees Aimed at Short Rotation Forestry: an Experimental Case Study in Japan[J]. Croatian Journal of Forest Engineering, 2012, 33(1): 5-14.
[13]宋春华, 区颖刚, 刘庆庭, 等.两段式螺旋扶起机构理论的研究[J]. 农机化研究,2010,32(11): 34-36.
[14]杜现军,李玉道,颜世涛,等. 棉秆力学性能试验[J].农业机械学报,2011,42(4):87-91.
[15]宋占华,肖静,张世福,等. 曲柄连杆式棉秆切割试验台设计与试验[J]. 农业机械学报,2011,42(11):162-167.
[16]王锋德,燕晓辉,董世平,等.我国棉花秸秆收获装备及收储运技术路线分析[J].农机化研究,2009,31(12):217-220.
[17]李耀明, 秦同娣, 陈进,等. 玉米茎秆往复切割力学特性试验与分析[J]. 农业工程学报,2011,27(1):160-164.
[18]解福祥, 区颖刚, 刘庆庭. 甘蔗收获机组合式扶起装置设计与试验[J]. 农业机械学报,2011,42(2):94-97.
[19]赖晓, 李尚平, 秦志文, 等. 新型甘蔗收割装置的仿真分析与试验研究[J].农机化研究,2011,33(2):102-105.
[20]王健康,吴明亮,任述光,等.往复式切割器传动机构运动动力学分析[J]. 中国农学通报, 2011,27(1):90-194.
Abstract ID:1003-188X(2016)06-0046-EA
Optimization Design of High-precision Corn-picking Machine Based on Adaptive Network
Guo Suna1, Zhang Xueming2, Liu Zhigang3,4
(1.Henan Polytechnic Institute,Nanyang 473000, China; 2.Jiyuan Vocational and Technical College,Jiyuan 459000,China; 3.School of Software, Yunnan University, Kunming 650091, China; 4.Nanchang Institute of Science & Technology,Nanchang 330108, China)
Abstract:In order to improve the accuracy of average corn Gleaner device, reduce the leakage rate, spike rate, the broken rate of kernel of unfavorable factors such as corn harvest efficiency, design a high precision of new corn average device. By means of the accurate monitoring of maize corn process average and average angular velocity changes of centroid Gleaner tensile force, when the leakage rate, breaking off spike rate and grain will alarm when broken, and using the theory of computer adaptive network, to adjust the clearance of gleaning and adaptive, improves the Gleaners device average precision. In order to verify the rationality of optimization design of the device, by using the method of simulation experiment, theoretical analysis and numerical simulation of the device for picking efficiency argument establishes Gleaners device modeling using ProE software, according to the process of increasing average tensile force changes caused by the centroid of the angular velocity, angular velocity and use ADMAS software to process of maize ear average in the simulation, the angular velocity and the experiment is consistent with the value. Finally the adaptive precision maize and common maize ear average device picking device for comparison, high precision of corn ear picking device in reducing the leakage rate and fault rate of picking spike shows excellent performance, greatly improving the corn ear picking efficiency,which can improve the technical reference for the design of automatic corn-picking machine.
Key words:corn-picking roll; tensile force; adaptive; Simulation
文章编号:1003-188X(2016)06-0046-04
中图分类号:S225.5+1
文献标识码:A
作者简介:郭素娜(1981-),女,河南邓州人,讲师,硕士。通讯作者:刘志刚(1980-),男,湖北天门人,副教授,博士,(E-mail)fiberhome@126.com。
基金项目:国家自然科学基金青年基金项目(51305152)
收稿日期:2015-05-18
猜你喜欢
中国教育信息化·基础教育(2016年11期)2016-12-27
软件导刊(2016年11期)2016-12-22
科技视界(2016年26期)2016-12-17
科教导刊·电子版(2016年26期)2016-11-21
科技资讯(2016年18期)2016-11-15
汽车科技(2016年5期)2016-11-14
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
