
基于新型香蕉种植开坑机的UG仿真
2016-03-23 06:45谢炳光马俊生马桂香刘子良
农机化研究 2016年6期
谢炳光,马俊生,马桂香,梁 甲,刘子良,文 棋
(广西大学 机械工程学院,南宁 530004)
基于新型香蕉种植开坑机的UG仿真
谢炳光,马俊生,马桂香,梁甲,刘子良,文棋
(广西大学 机械工程学院,南宁530004)
摘要:针对大规模香蕉种植开坑机的研发比较缺乏的问题,设计了一种新型香蕉种植开坑机。该机具有开坑质量高、成本较低及能适应不同挖坑要求的特点。为此,介绍了新型香蕉种植开坑机的工作原理,并运用三维软件UG进行运动学分析,真实再现了新型香蕉种植开坑机的工作状况。结果表明:新型香蕉种植开坑机能够满足工作需求,可为其他类似农作物开坑机器的研制提供参考。
关键词:香蕉;开坑机;UG ;仿真
0引言
目前,香蕉种植多采用拖拉机翻犁之后,再人工开坑放入香蕉苗,不仅增加了种植香蕉劳动强度,而且效率不高。
针对目前香蕉开坑机的缺乏的问题,研制了一种效率高、安全系数大、劳动强度低、高质量开坑且能适用不同工作环境条件的一种新型香蕉种植开坑机。若对新型香蕉种植开坑机器的研究是通过类比或经验得出,则具有一定的盲目性和局限性。因此,需要更为科学合理的设计方法,来为新型香蕉种植开坑机的生产和制造提供更加准确的参数。本文利用运动学理论结合UG软件自带运动仿真模块,真实再现新型香蕉种植开坑机的工作状况,对开坑机进行运动学分析和三维仿真。此方法对降低研发成本、明确开坑机的负载范围及延长机具使用寿命具有重要的指导意义。
1新型香蕉种植开坑机的工作原理
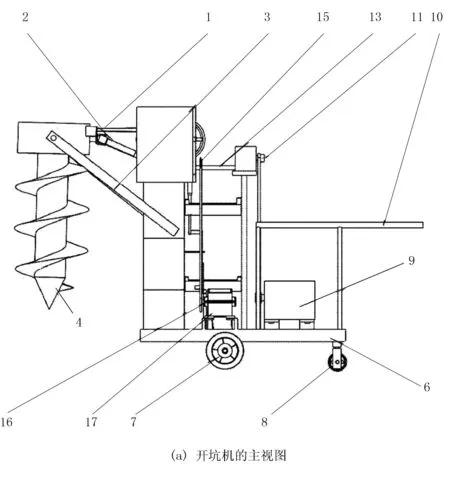
开坑机包括动力机构、传动机构、开坑机构、行走机构和螺旋式刀盘,如图1~图3所示。
1)动力机构:以柴油机作为动力源。
2)传动机构:动力传输路径为柴油机、皮带轮、离合器、传动轴传于十字联轴器,通过第2对锥齿轮实现螺旋式刀盘换向、减速和旋转,完成植树挖坑机的挖坑作业。
3)开坑机构:开坑机构的提升过程是先旋转手轮,经驱动杆通过第1对锥齿轮、涡轮蜗杆、钢绳带动螺旋式刀盘提升运动。其中,涡轮蜗杆具有自锁功能,螺旋式刀盘提升后而不会下降。新型开坑机螺旋式刀盘下降时通过旋转手轮靠螺旋式刀盘的自身重力来完成植树挖坑机的下降进给运动。
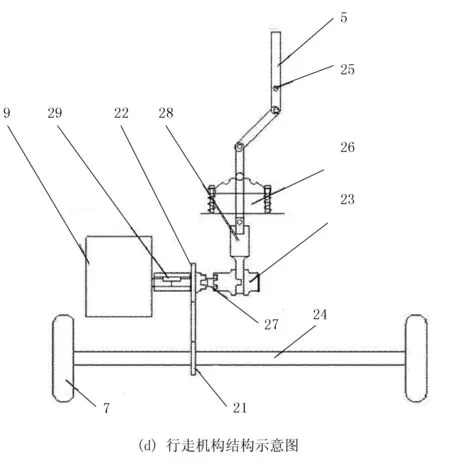
4)行走机构:新型开坑机的行走运动可分为自动行走和手动行走。自动行走是利用手柄、限位装置限位、拨叉使花键连接套与第3链轮配合,动力依次经第1链轮、减速器、第3链轮,从而带动第4链轮、万向轮和前轮旋转运动实现自动行走运动;减速器起到减速与换向作用。手动行走是靠人力推动扶手将动力传给万向轮和前轮实现行走运动。

1.钢绳 2.十字联轴器 3.支撑杆 4.螺旋式刀盘
螺旋式刀盘由螺旋叶片、开坑钻头、主支杆组成,如图2所示。螺旋式刀盘在扭矩和自身重力的作用下圆周转动并向下进给,主支杆对螺旋叶片与开坑钻头起到支撑作用,由开坑钻头实现刀盘定位,螺旋叶片对土壤进行切削;在螺旋叶片的作用下,土壤沿螺旋叶片的弧线覆盖在坑位的周围。

1.开坑钻头 2.螺旋叶片 3.主支杆
2土壤质点的运动规律分析
2.1土壤质点的速度分析
螺旋式刀盘在扭矩和自身重力下的作业下圆周转动并向下进给,螺旋叶片对土壤进行切削;在螺旋叶片的作用下,土壤沿螺旋叶片的弧线填在坑位的周围。现以螺旋叶片上任意土壤质点作为研究对象,设螺旋式刀盘以角速度ω进行转动,并以速度vz向下进给,如图3所示。

图3 土壤质点的速度图
土壤质点的绝对速度等于相对速度、牵连速度加上竖直速度的矢量和,则




ω—螺旋式刀盘的角速度(rad/s);
r—土壤质点到中心轴的质点(m);

δ—螺旋叶片与水平方向的夹角(°)。
2.2土壤质点的加速度分析
质点位于匀速转动的螺旋式刀盘的螺旋叶片上,且沿着螺旋叶片相对向上滑动,如图4所示。根据运动学知识,质点的绝对加速度等于科式加速度、相对加速度和牵连加速度的矢量和,则



δ—牵连加速度与相对加速度的夹角(°)。
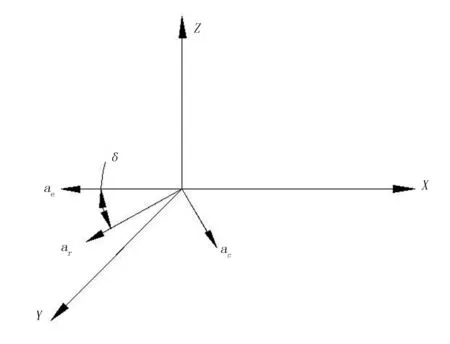
图4 土壤质点的加速度图
2.3土壤质点的力学分析
以螺旋叶片上任意质点作为研究对象,分析其受力如图5所示。
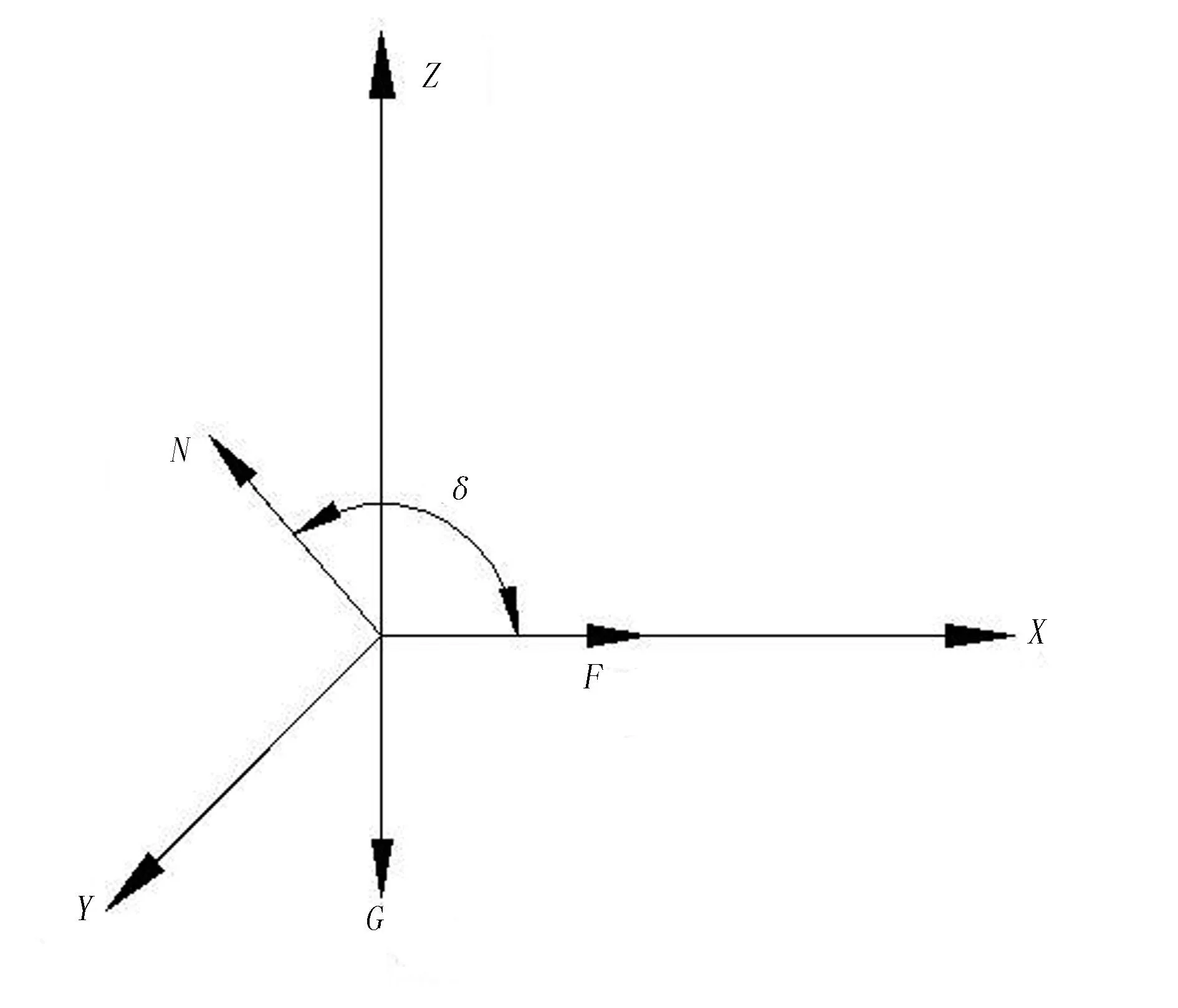
图5 受力图
3新型香蕉种植开坑机器的运动学分析
3.1新型香蕉种植开坑机器的三维建模
要进行开坑机器的运动学分析,需对开坑机器建立三维模型。本新型香蕉种植开坑机器由动力机构、传动机构、开坑机构、行走机构和螺旋式刀盘组成。在三维软件UG中建立三维模型如图6所示。

1.钢绳 2.十字联轴器 3.支撑杆 4.螺旋式刀盘 6.机架
3.2创建驱动条件
在新型香蕉种植开坑机器中,加入两动力源: 齿轮轴的减速度为ω1= 11°/s;传动轴的动力角加速度为ω1= 330°/s。驱动条件如图7所示。

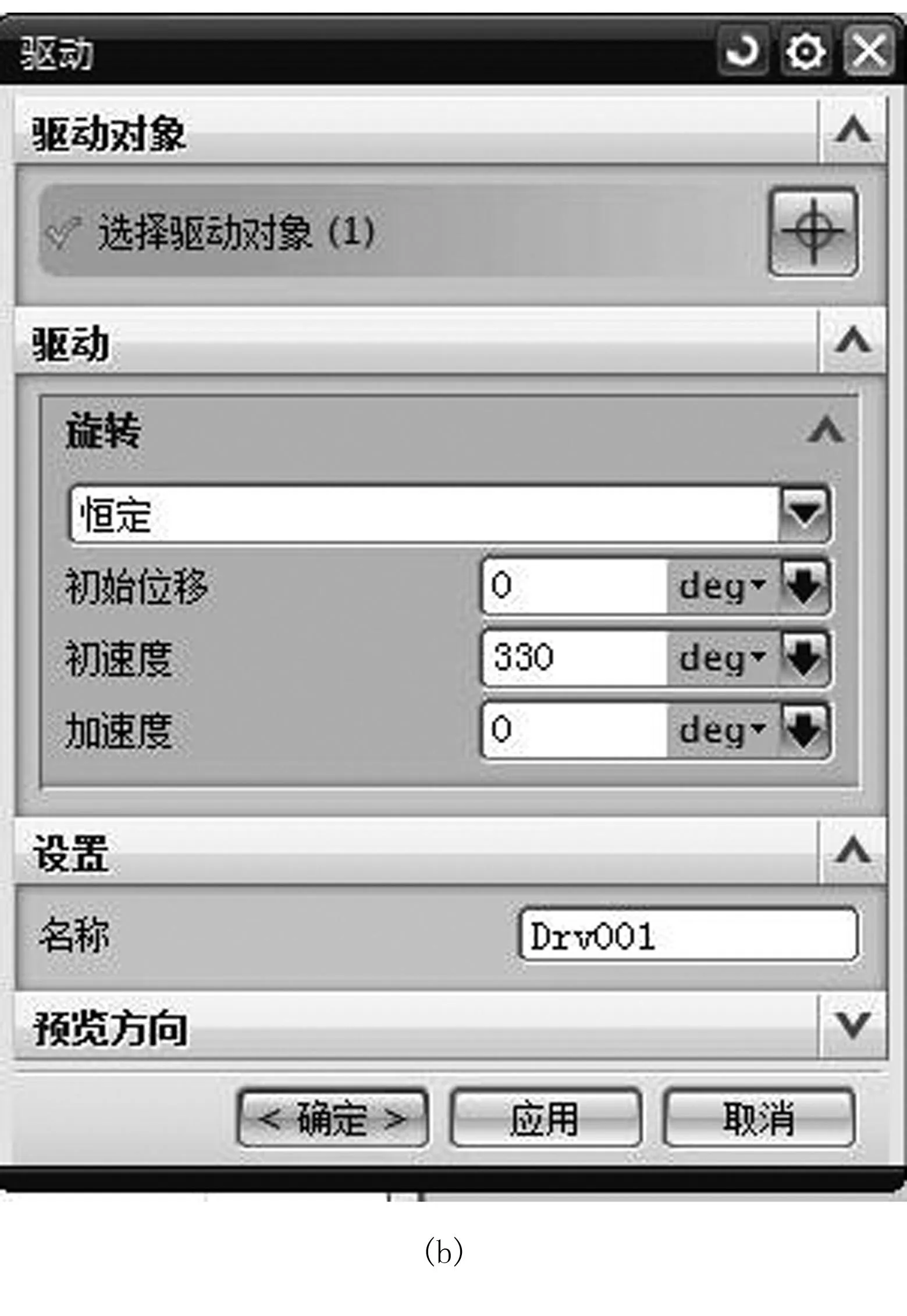
图7 新型香蕉种植开坑机器的驱动条件
3.3运动仿真的解算方案
经UG基于运动学与动力学的综合分析,确定好重力常数的大小和方向,以及解算方案,如图8所示。

图8 新型香蕉种植开坑机器的解算方案
3.4螺旋式刀盘运动仿真的解算结果
经UG运动学分析,螺旋式刀盘刀尖位置位移图如图9所示,螺旋式刀盘刀尖位置的速度图如图10所示。以螺旋式刀盘的切削刀的某边缘一点作位置跟踪,其位移图如图11所示;速度图如图12所示。
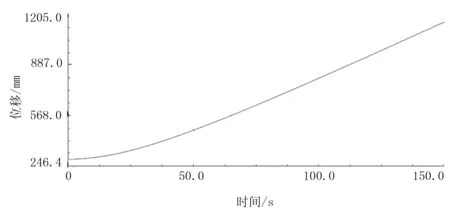
图9 螺旋式刀盘刀尖位置的位移图

图10 螺旋式刀盘刀尖位置的速度图

图11 螺旋式刀盘的切削刀位移图

图12 螺旋式刀盘的切削刀速度图
由运行的结果分析可得:螺旋式刀盘刀尖位置的运动为匀速直线运动,其速度为7.5mm/s。
由运行的结果分析可知:螺旋式刀盘的切削刀运动为匀速转动,其速度是485mm/s。
4结论
三维仿真软件UG真实再现了新型香蕉种植开坑机的工作状况,且开坑机器符合工作需求。
参考文献:
[1]黄伟,娄玉印,韦宁,等.行走式植树挖坑机的工作原理及结构分析[J].农机化研究,2013,35(2):35-39.
[2]濮良贵,纪名刚,陈国定,等.机械设计[M].北京:高等教育出版社,2006:165-184.
[3]李现友,段伟.Inventor有限元分析模块的实例应用[J].包头职业技术学院学报,2009(4):10-14.
[4]沈昱,安琪,孙林,等.链传动受力分析及计算方法商榷[J].机械科学与技术,2002,21(2):220-221.
[5]范帅,李宝林,陈景昌.发动机链条的微接触有限元分析[J].机械强度,2011,33(3):418-422.
[6]王彦伟,罗继伟,叶军,等.基于有限元的疲劳分析方法及实践[J].机械设计与制造,2008(1):22-24.
[7]郑广平,覃海英,娄玉印.基于新型植树挖坑机的Pro/E仿真[J].农机化研究,2013,35(6):73-76.
Abstract ID:1003-188X(2016)06-0122-EA
Based on the New Type of Banana Planting Open Pit of UG Simulation Machine
Xie Bingguang, Ma Junsheng, Ma Guixiang, Liang Jia, Liu Ziliang, Wen Qi
(College of Mechanical Engineering, Guangxi University, Nanning 530004, China)
Abstract:For large banana plantations of relative lack of research and development of the open pit machine, designed a new type of banana planting machine open pit.This machine has the open pit are of good quality, lower cost, and can adapt to the characteristics of different digging holes required. In this paper, the new type of banana planting the working principle of the open pit machine kinematics analysis and using 3d software UG, new real banana planting open pit machine working condition. The results show that the new type of banana planting open pit machine can meet the demand of work. A new type of banana planting the development of the open pit machine can be used as crop other similar open pit machine developed to provide the reference.
Key words:banana; open pit machine; UG; simulation
文章编号:1003-188X(2016)06-0122-04
中图分类号:S222.5+2
文献标识码:A
作者简介:谢炳光(1963-),男,南宁人,工程师,(E-mail)bg6816@163.com。
基金项目:广西大学国家级大学生创新创业训练计划项目(201410593052)
收稿日期:2015-04-21
猜你喜欢
小天使·一年级语数英综合(2021年4期)2021-05-08
快乐语文(2020年30期)2021-01-14
家教世界·V家长(2019年3期)2019-06-11
小天使·三年级语数英综合(2017年11期)2017-12-05
阅读与作文(小学高年级版)(2017年10期)2017-10-11
科技资讯(2016年18期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
