
挖拔式木薯联合收获机的设计
2016-03-23 06:45廖宇兰刘世豪郑美云
农机化研究 2016年6期
关键词:木薯
王 涛,廖宇兰,刘世豪,杨 怡,郑美云
(海南大学 机电工程学院,海口 570228)
挖拔式木薯联合收获机的设计
王涛,廖宇兰,刘世豪,杨怡,郑美云
(海南大学 机电工程学院,海口570228)
摘要:针对我国木薯产业对木薯机械化收获的需求,以及人工和半机械化收获费时耗力、效率低等问题,设计了挖拔式木薯联合收获机。该机一次作业能完成木薯的挖掘、拔起、薯茎分离、薯块和茎秆收集等工序。振动挖掘装置的3阶纵刃平面铲具有良好的入土性和碎土性,防堵辊轮减少了土块与杂草的堵塞和缠绕,偏心轮式的振动筛能有效地减少木薯的拔起力;夹持机构的3根夹持带的错位排列提高了夹持的可靠性;整机底盘装载机架升降液压系统能够适应机架位置需求的调整。该设计为后续的木薯联合收获机的设计与研究提供了一定的参考。
关键词:木薯;联合收获机;挖拔式;挖掘装置;夹持输送
0引言
木薯是世界三大薯类作物之一,广泛种植于热带、亚热带地区,具有很高的营养价值,是重要的粮食、工业原材料和能源性作物[1-2]。近年来,随着国家政策的支持与规划及可再生能源生物燃料乙醇的巨大潜力,木薯需求量急剧增加。木薯已然成为了迫切需要发展的热带作物和绿色能源发展战略新焦点[3]。木薯亟待机械化收获,研发性能优异的木薯收获机将推动整个木薯产业的发展。
目前,木薯收获机按其收获方式可分为挖式、拔式、挖拔结合式3种机型[4],采用拖拉机悬挂牵引作业,尚未有较成熟的、专门用于木薯收获的机械。现阶段,木薯收获机械化程度过低,大多采用人工、畜力或半机械化收获。目前,我国大力培育推广适合机械化种植的木薯新品种,木薯种植农艺需求主要参考收获机械的工作参数而制定,木薯收获机械也要根据木薯生长特性来设计。为了提高木薯收获的机械化程度和效率,研制出可靠和适用于不同品种的、专门的木薯联合收获机势在必行。本文参考薯类和其他块(根)茎类收获机的收获机理,与木薯特性相结合,研究设计了挖拔式木薯联合收获机。
1整机结构及主要技术参数
1.1整机结构工作原理
挖拔式自走木薯收获机主要由多阶带纵刃的挖掘铲、防堵辊轮装置、振动碎土筛装置、夹持输送装置、薯茎分离装置、茎秆回收输送装置、木薯收集装置、茎秆收集装置、挖掘限深机构、传动系统、液压操作系统、机架和地轮等部分组成,如图1所示。
该机全部动力由柴油内燃机提供,行走、防堵辊轮、振动筛、夹持输送、薯茎分离及秆茎的收集由内燃机通过变速箱直接提供,挖掘装置的升降、限深机构的调整、薯块与茎秆收集箱的装卸动力由液压控制装置供给。为了提高行走的通过性,由安装于底盘的液压拉杆操纵,通过调整底盘液压装置实现整个机架的位置调整。
工作前,木薯茎秆由人工在离地面50cm的距离处将其砍断,预留高度是为了更有效地实现木薯的夹持和拔起。工作时,在行进的过程中液压操纵装置控制挖掘铲装置进入工作位置,同时限深机构触及地面限定挖掘深度。多阶纵刃挖掘铲在挖掘中,导向拨轮将行走误差和种植误差范围内的木薯拨入可夹持的范围,木薯与土块同时被挖起,在防堵辊轮运转下将堵塞或壅土在挖掘铲上的土壤进行破碎并带入振动筛;木薯与土块进而落入振动筛后,振动筛往复式振动将土块进一步的疏松和破碎,细小土块通过振动筛间隙落入田间;木薯茎秆被夹持输送装置夹持,在夹持输送机构的输送和机器的行走下,木薯被输送至薯茎分离装置处进行分离,木薯块根直接落入收集装置,秆茎由传送带将其输至茎秆收集装置,从而完成木薯收获。

1.挖掘铲 2.振动碎土筛装置 3.前地轮 4.后地轮
1.2主要技术参数
配套动力(柴油机)/kW:≥58.8
外形尺寸(长×宽×高)/mm:3 000×2 100×1 900
工作行数:单行
适应收获行距/cm:80~120;
挖掘深度/mm:0~350(可调)
作业速度/m·s-1:1.5~2.0
生产率/hm2·h-1:0.5~1.0
2主要机构及部件设计
2.1挖掘装置
该机采用组合式振动型的挖掘装置,由可调式限深轮、多阶纵刃挖掘铲、防堵和壅土辊轮、偏心轮机构组成的振动筛和导向装置构成,如图2所示。
2.1.1挖掘铲
挖掘铲的作用是挖松木薯块根周围的土壤,并将土壤抬升至一定高度,实现木薯与土壤的分离,降低夹持输送装置的拔起力,进而减少功率消耗。因此,挖掘铲应有良好的入土性即入土阻力小,也应有较好的土壤破碎性能。为此,通过对土壤的破碎理论的研究,结合其他块根类作物收获挖掘铲的结构,该机挖掘铲的设计为3阶并带有纵刃的平面组合铲。该铲的第1阶具有好的入土性,第2阶增大对土壤的压破从而提高其破碎性,第3阶对压破变形后的土壤更利于破碎分离。纵向刀刃主要是对土壤进行剪切压破,提高土壤的破碎能力,同时加强铲板的结构强度,提高挖掘铲的性能,如图3所示。

1.限深轮 2.挖掘铲 3.导向装置

图3挖掘铲结构与受力分析
α1、α2、α3为铲面倾角;h1、h2、h3为提升高度;G为土壤与木薯块的重力;P为挖掘铲的牵引阻力;N为铲对土壤和木薯的反作用力;μ为土壤对铲的摩擦系数,μ=tanφ;φ为土壤与钢的摩擦角,一般为30°~36°; CaA0为土壤附着力;γ为铲刃张角;P0为铲刃阻力;P1为铲刃与土块和杂草间的摩擦力;P2为垂直铲刃的力;A0为单铲宽度;L1、L2、L3为铲面长度。
铲面倾角α影响挖掘铲的入土性和碎土性。结合挖掘铲阻力和木薯与土块的提升高度,对其受力分析(见图3),建立方程为
Pcosα-(μN0+CaA0)-Gsinα≥0
N0-Gcosα-Psinα=0
在非粘性土壤中,挖掘铲运动速度较小、铲刃锋利的条件下,CaA0可以忽略不计。铲的倾角为
为了能有好的入土性和挖掘阻力,通过李彦晶等[5]分析研究表明:在工作速度不大的情况下,倾角α1=10°~20°时入土和阻力较小,设计取α1=15°。α2可提高土壤的破碎性和提升高度,据郑厚贵等[6]研究表明:α=30°左右时率先发生剪切变形,具有较好的土壤破碎性,设计取α2=30°。α3掘起土块沿挖掘铲表面运动,需克服摩擦阻力,防止堵塞和壅土[7],因此取α3>45°-φ/2,φ为土壤的内摩擦角,设计取α3=20°。
铲刃张角γ须对破开土壤和杂草有滑切作用,防止杂草缠绕,减少挖掘阻力。对铲刃受力分析有
其中,φ为土壤对钢的摩擦角。为了适应平作和垄作的木薯收获,设计取γ=90°。
挖掘铲的宽度主要依据木薯块根的分布半径决定,同时考虑种植和机器的行进误差,在最小的动土条件下取得最佳的设计宽度。据廖宇兰[8]等统计分析可知:木薯块根直径分布在76cm左右,该宽度下的挖掘铲用于收获时伤薯率和损失率低于2%。综合机械的行走误差和动土量,设计中组合式挖掘铲的宽度为90cm。
挖掘铲的总长度L由L1、L2、L3组成。铲的每段长度L根据木薯和土块的提升高度h及倾角α而得,即
L=L1+L2+L3
h=h1+h2+h3
其中,h为土块和木薯的提升高度;h1、h2、h3为各阶高度。各阶倾角为:1阶倾角α1=15°,2阶倾角α2=30°,3阶倾角α3=20°。
2.1.2振动筛机构
振动筛机构主要由偏心轮、连接件及栅条型振动筛组成,动力由变速箱通过皮带传动提供。振动筛采用偏心轮实现振动,置于挖掘铲防堵辊轮之后,主要作用是将挖掘起的木薯和土块通过振动让其松散,提高土薯的分离效果,并减小后续的夹持输送机构的拔起力。该机构采用栅条型筛子,偏心轮提供动力,固定连接杆前置与偏心距等长的活动连杆,活动连杆与偏心轮构成平行四边形机构,通过四边形的变形带动振动筛抖松土块和木薯。碎裂的土壤通过筛子间隙落入田间,木薯则被夹持机构拔起。振动筛结构如图4所示。

1.偏心轮 2.机架 3.固定连接杆 4.连接杆 5.栅条型振动筛
振动筛的振动幅度由偏心距约束,偏心距的选取则参考土质和木薯的种植农艺;栅条型振动筛旨在抖动和漏土,其间隙适当偏大,参考距离为3~8 cm,振动筛由连接杆通过轴承连接于偏心轮构成振动运动。分析偏心轮的运动与振动筛的运动关系,设计中偏心轮采用顺时针旋转,可对土块和木薯达到抖动并向后抛出的效果。
2.1.3辊轮与导向机构
为了防止挖掘装置在挖掘过程中土块壅土堵塞和杂草的缠绕,增设了辊轮防堵装置,安装于挖掘铲与振动筛之间。工作时,挖掘铲将土块提升一定高度后带轮带动辊轮旋转,将拥堵在铲末端的土块和杂草及木薯摔抛至振动筛,从而减少了牵引阻力和机械的堵塞。
由于木薯种植的不规范、倒伏和机械行走的误差,挖掘过程中木薯杆不能很好地被夹持机构夹持拔起,因此挖掘装置需安装导向机构。导向机构由导向杆和拨轮构成,导向杆将倒伏或离计划行走路线较远的木薯导入拨轮,拨轮在挖掘过程中扶持木薯杆,防止其向前倾倒,同时将木薯杆拨入夹持输送装置,提高夹持率。
2.2夹持输送装置
夹持输送装置的目的是将挖掘提升后的薯块夹持拔起,实现土薯分离,并输送至一定高度。夹持输送装置主要由带轮、夹持输送带、活动夹持轮、固定夹持轮、张紧轮及夹持架构成。工作原理:木薯与土块在振动筛振动时,木薯茎秆被机构夹持,在两边的夹持带同步运动的过程中木薯从土块中拔起,输送至薯茎分离装置进行薯块分离;分离后薯块落入收集装置,茎秆在输送带的作用下继续运动直至茎秆收集装置。夹持输送装置结构如图5所示。

1.带轮 2.夹持机架 3.张紧轮 4.弹簧
2.2.1夹持方式
木薯茎秆质脆硬,在夹持过程中易折断,从而导致夹持失败,增大了木薯收获损失,因此设计中采用多段柔性夹持的方式以提高其夹持的可靠性。如图6所示:在固定夹持轮的夹持机构一侧安装两行夹持带,活动夹持轮一侧的夹持带置于竖直方向的固定夹持轮侧的夹持带中间,从而形成三角形夹持;同时,活动轮侧的夹持带能随着木薯茎秆的粗细自动调节以压紧木薯,通过摩擦力将木薯茎秆夹持。

1.木薯茎秆 2.固定夹持轮 3.夹持带 4.活动夹持轮 ;A、B、C夹持点
2.2.2夹持输送装置参数
防止夹持带的脱落和提高木薯茎秆不被压破,设计中采用多楔带。多楔带具有较好的柔性,能有效地通过其伸缩将木薯茎秆夹持;同时,在多个梯形楔作用下,能很好防止带的脱落,使夹持稳定、可靠。
夹持装置的夹持力、夹持带的速度及机器的行进速度将直接影响着木薯拔起的可靠性。研究分析表明:木薯茎秆的拔起方向沿茎秆方向拔起损失率最少,拔起力最小[9]。因此,建立木薯被拔起速度与拔起力学模型,如图7所示。
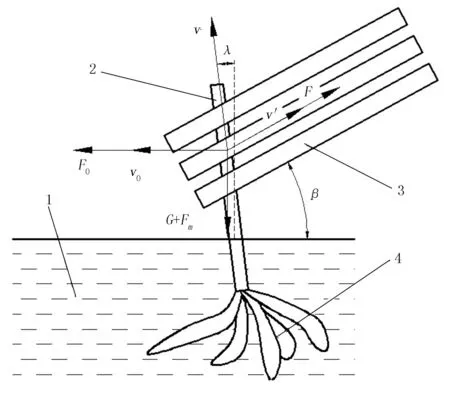
1.土壤 2.木薯茎秆 3.夹持带 4.木薯块根
F为夹持输送机构对木薯茎秆茎的拔起力;F0为机器前进时对木薯杆的推力;G为木薯块根与茎秆质量;Fm为土壤阻力;V0为机器前进速度;V为木薯的拔起速度;V′为夹持带的运转速度;λ为木薯前倾角度,取λ=5°~10°;β为夹持带与地面的倾角。
图7木薯拔起速度与拔起力学模型
由图7的拔起力模型可得夹持输送机构对木薯的拔起力F及夹持力F夹持的关系为
其中,F0为机器前进对木薯杆的推力;G为木薯块根与秆茎质量;Fm为土壤阻力;β为夹持带与地面的倾角;μ为木薯茎秆与夹持带的摩擦因数。
通过对图7中速度模型的分析,得夹持带的运转速度及木薯被拔起的速度关系为
即
由上式可得:夹持带的运转速度、木薯被拔起的速度均与机器的进行速度和夹持机构的倾角有关;拔起力随拔起速度的增加而增大[10]。综合考虑整机各个装置的布置、动力需求及可靠的夹持率,设计木薯被拔起速度为V=2m/s,夹持机构的倾角β=35°,机械的收获行进速度V0=1.5~2m/s。
3其他机构及部件
薯茎分离装置采用圆盘式锯齿刀,平行安装于夹持输送装置的末端,由于木薯茎秆根部木质素较硬,因此刀具应具有较强的力学特性。薯块收集装置用于收集分离后的木薯块根,由液压系统控制,在木薯装满装置后能自动倾卸。薯茎分离后的茎秆在输送带的作用下集中收集置于茎秆收集装置,防止其在田间发芽生长。同时,该机底盘装有可垂直升降的液压系统,可以实现工作位置和行走位置的调整,满足于不同地况的木薯收获。
4结论与展望
1)我国木薯种植面积在逐年增加,其产业需求量供不应求,而我国的木薯机械化收获研究起步较晚,机械化程度不高,人工收获费时费力,制约着木薯产业的发展。目前,我国的木薯收获机械研究仍处于研制试用阶段,尚未形成成熟实用的机型。为此,本文借鉴参考其它块根类作物较成熟的收获机械结合木薯的生物特点设计了挖拔结合的自走式木薯联合收获机械。
2)该机械对木薯进行挖掘,振松块根周围的土壤,将木薯出土壤中拔起;再通过后续薯茎分离,对木薯块根的收集及茎秆回收,实现了木薯从挖掘到收集的整个过程,机械化程度较高。
3)振动挖掘装置具有好的入土性、碎土性,以及防堵塞和壅土的性能。三阶带纵刃平面组合铲由铲面倾角的变化适应入土倾角小、碎土倾角大的铲面倾角变化需求;防堵塞辊轮能较好地解决土块在铲与机架的连接处的堵塞拥堵和与杂草缠绕;振动筛将木薯与土块一同振动,抖松木薯块根周围土壤,便于拔起,减少了拔起力。
4)夹持输送装置采用3根多楔带错位分布进而对木薯茎秆进行夹持输送。该夹持方式能有效地防止木薯茎秆的夹断和压碎,夹持性能可靠;多楔带柔性较好,多楔结构能防止带的脱落,提高了夹持输送性能。
5)为满足不同的木薯收获条件,该机前置限深地轮,适应不同品种和种植农艺的收获需求;整机底盘装载机架升降液压系统,适应机架位置需求的调整及不同地况的木薯收获。
6)目前,该机尚处于理论设计阶段,欠缺实地的田间试验及进一步的参数和结构优化改进。
参考文献:
[1]杨望,杨坚,郑晓婷,等.木薯块根收获机械与技术研究现状及发展趋势[J].农机化研究,2012,34(6):230-235.
[2]方佳,濮文辉,张慧坚.国内外木薯产业发展近况[J].中国农学通报,2010,26(16):353-361.
[3]吴薇,柯佑鹏.中国木薯产业发展现状及前景展望[J].中国热带农业,2011(3):6-9.
[4]廖宇兰,孙佑攀,林大春,等.木薯收获机械研究进展[J].热带农业工程,2009(1):55-56,60.
[5]李彦晶,魏宏安,孙广辉,等.4U-1400FD型马铃薯联合收获机挖掘铲的参数优化[J].甘肃农业大学学报,2011,46(5):132-136.
[6]郑厚贵,张周强,徐武彬,等.基于土壤压缩破坏理论的挖掘铲的设计与分析[J].农机化研究,2011,33(11): 122-126,130.
[7]任露泉.土壤粘附力学[M].北京:机械工业出社,2011.
[8]Liao Yulan,Sun Youpan,Liu Shihao,et al. Development and prototype trial of digging-pulling style cassava harvester[J].农业工程学报,2012,28(2):29-35.
[9]余瑞明,廖宇兰,刘世豪,等.木薯收获机夹持输送机构设计与力学分析[J].农机化研究,2015,37(8):74-80.
[10]杨望,蔡敢为,杨坚,等.木薯块根拔起力的力学模型和数学模型分析[J].农业工程学报,2011,27 (11):95-100.
Design and Research of Digging Pull Cassava Combine Harvester
Wang Tao, Liao Yulan,Liu Shihao,Yang Yi, Zheng Meiyun
(College of Mechanical and Electrical Engineering, Hainan University, Haikou 570228, China)
Abstract:According to the Chinese cassava industry demanded for cassava harvest mechanization, artificial and semi mechanized harvesting were time-consuming and low efficiency,which has not been able to meet the industrial development, so the digging pull cassava harvester was designed. The cassava harvester enables a one-stop achievement of cassava digging, pulling up, clamping and conveying, separating roots from stems tuber and stem collection process. The three order flat shovel with longitudinal blade of the vibration digging device has good soil properties and soil crushing performance, and the anti-blocking roller can reduce the blocking of the soil and winding with weeds, and the vibrating screen of eccentric wheel can effectively reduce the pulling force of cassava.The clamping mechanism of the three clamping belt with dislocation arrangement can improve the reliability of clamping.The chassis is mounted lifting hydraulic system that can adapt to the needs of the adjustment of the frame’s position. This design provides a reference for the further design and research for the cassava harvester.
Key words:cassava; combine harvester; type of digging pull; digging device; clamping and conveying
文章编号:1003-188X(2016)06-0126-06
中图分类号:S225.7+1
文献标识码:A
作者简介:王涛(1989-),男,四川通江人,硕士研究生,(E-mail) wt20110320@163.com。通讯作者:廖宇兰(1967-),女,广东兴宁人,教授,硕士生导师,(E-mail) liaoyulan@sina.com。
基金项目:国家自然科学基金项目(51365011)
收稿日期:2015-05-25
猜你喜欢
南方农业学报(2022年6期)2022-09-05
古今农业(2021年1期)2021-07-20
小天使·五年级语数英综合(2021年5期)2021-07-11
世界热带农业信息(2019年7期)2019-08-30
世界热带农业信息(2019年4期)2019-07-03
世界热带农业信息(2019年2期)2019-05-17
世界热带农业信息(2018年11期)2018-01-17
广东第二课堂·小学(2017年5期)2017-05-27
世界热带农业信息(2014年8期)2014-09-23
中国粮油学报(2014年8期)2014-02-06
