
南疆红枣枣园喷雾机控制系统的设计
2016-03-23 06:45张德智廖结安
农机化研究 2016年6期
张德智,张 琦,廖结安,王 伟,2
(1.塔里木大学 机械电气化工程学院, 新疆 阿拉尔 843300;2.新疆维吾尔自治区普通高等学校现代农业工程重点实验室, 新疆 阿拉尔 843300)
南疆红枣枣园喷雾机控制系统的设计
张德智1,张琦1,廖结安1,王伟1,2
(1.塔里木大学 机械电气化工程学院, 新疆 阿拉尔843300;2.新疆维吾尔自治区普通高等学校现代农业工程重点实验室, 新疆 阿拉尔843300)
摘要:为实现通过控制直流电机,达到调节枣园喷雾机喷杆机架垂直高度与水平距离、控制喷雾压力与行走速度、以适应南疆地区红枣枣园喷雾作业要求的目的,从硬件和软件两个方面,设计了一种以STC89C52单片机为核心的遥控电机控制系统,并进行仿真与测试。结果表明:软件与硬件电路连接合理,程序运行稳定可靠,可以实现5台电机的调速转向控制,满足系统设计要求。
关键词:枣园;喷雾机;电机控制;单片机
0引言
红枣是新疆的特色林果,味甘香甜,营养丰富。新疆独特的光热、温度、湿度等气候条件,为优质红枣的生长提供了优良的自然条件。红枣产业已成为新疆近年来发展最快、覆盖面最广、效益最突出、惠民成效最显著的一项林果产业[1]。随着红枣直播建园技术的应用,红枣种植规模迅速扩大,矮化密植栽培模式在全疆广泛采用,提高产量与经济效益的同时,也为病虫害的集中爆发提供了条件。红枣是常年生密植灌木,因树龄不同,种植行距在1~3m,株距0.7~3m,传统喷雾机因尺寸与喷杆固定等原因,无法适应不同树龄枣树的喷雾要求,如果发生突发性和扩散蔓延快大面积的病虫害将难以防治, 影响红枣的产量、质量和经济效率[2]。同时,燃油农业机械虽然功率较大,但其也有体积大、质量大和作业空间小等缺点; 而电动力农业机械的设计更加紧凑,使用方便,具有“小巧”的特点,非常适应此类行距小的情况下使用[3]。
针对以上情况,通过控制电机调节喷杆机架垂直高度与水平长度、喷雾压力及喷雾机行走,研制适应不同树龄枣树的垂直高度与水平距离的电动力枣园喷雾机,对于提高枣园喷雾机械化水平、降低劳动强度具有积极意义。因此,基于单片机与无线蓝牙传输,设计结构小巧、便于操控的枣园喷雾机控制系统,用以实现喷雾机的喷雾作业要求。
1系统设计思路
系统以STC89C52RC单片机为主控制核心,以HC-05蓝牙主从模块为通信元件,以按钮组、多路选择开关组为手持控制端控速控向元件,以YD-DCMD2-48直流电机模块为电机驱动端电机驱动组模块,设计完成电机控制系统。系统实现的主要功能为通过操控手持控制端控速、控向元件,完成联动控制2台直流电机的正反转与调速,点动控制3台直流电机的正反转。其设计系统结构框图如图1所示。

图1 系统结构框图
2系统硬件设计
2.1手持遥控端设计
主控制核心模块为STC89C52单片机,是STC公司生产的一种低功耗、高性能CMOS 8位微控制器,具有8k在系统可编程Flash存储器。STC89C52使用经典的MCS-51内核,但做了很多的改进,使得芯片具有传统51单片机不具备的功能。在单芯片上,拥有灵巧的8位CPU和在系统可编程8k字节Flash、512字节RAM、32位I/O口线及看门狗定时器,内置4kB EEPROM、MAX810复位电路,3个16位定时器/计数器、4个外部中断、1个7向量4级中断结构(兼容传统51的5向量2级中断结构),全双工串行口。另外,STC89C52可降至0 Hz静态逻辑操作,支持2种软件可选择节电模式。空闲模式下,CPU 停止工作,允许RAM、定时器/计数器、串口、中断继续工作;掉电保护方式下,RAM内容被保存,振荡器被冻结,单片机一切工作停止,直到下一个中断或硬件复位为止。其工作电压为5.5~3.3V,最高运作频率为35MHz,6T/12T可选[4]。
通用异步收发传输器(Universal Asynchronous Receiver/Transmitter)通常称作UART,是一种异步收发传输器。在本系统中,主控制模块按照UART通信协议,将并行的数据(字符串)经过移位器的移位后一位接一位(串行)地从主控制模块的TXD端口发出,通过杜邦线发送至蓝牙串口的RXD端口,蓝牙同样按照UART通信协议一位一位接收数据并再次通过移位器的移位将数据解析为主控制模块发送的指令。整个系统的串行通信原理包括UART与蓝牙的通信原理和蓝牙与蓝牙之间的通信原理[5],如图2所示。
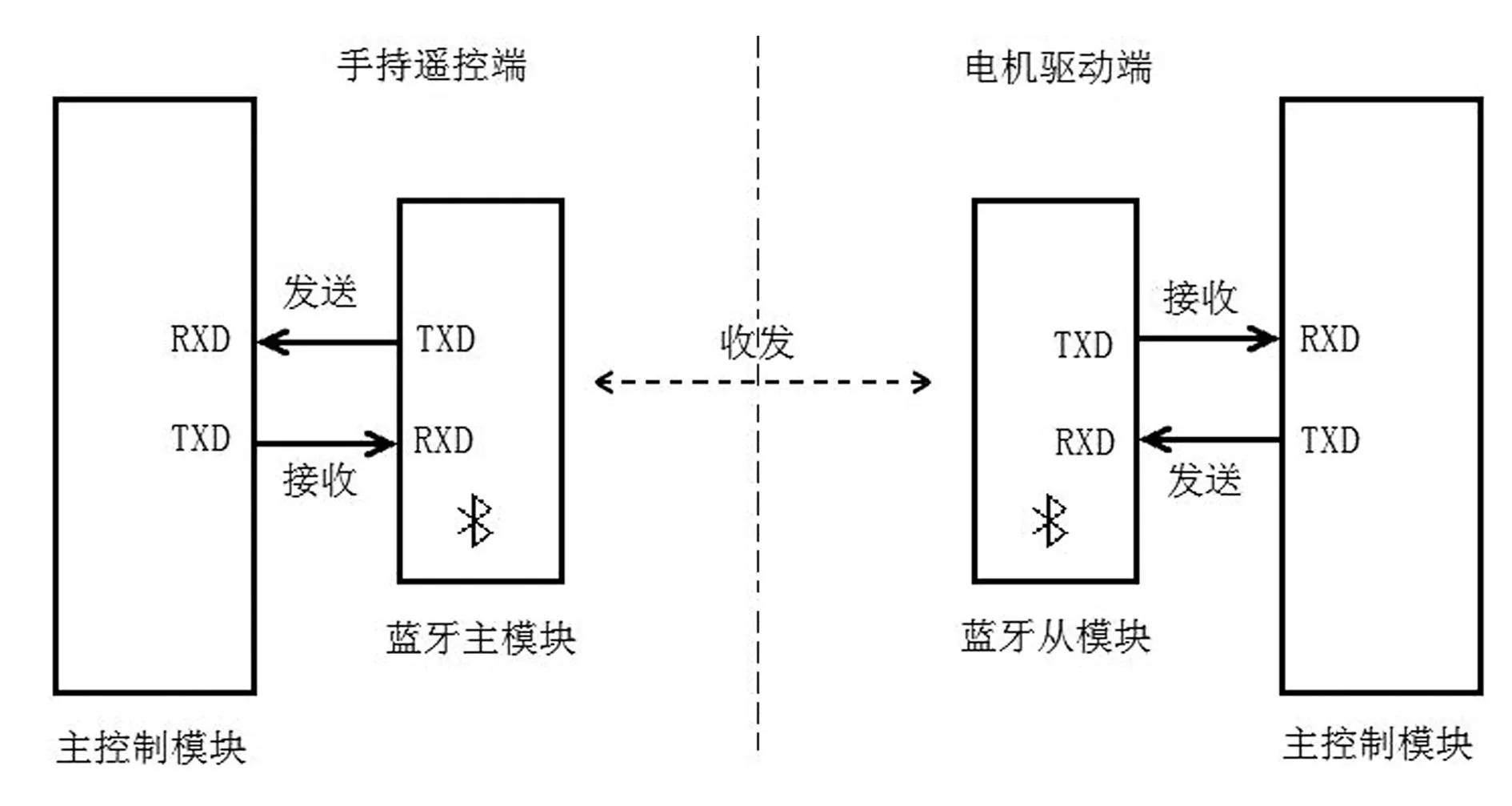
图2 串行通信图
多路选择开关是用来切换各种被测量模拟信号的关键元件,基于译码器工作原理,通常具有多个输入端及1个输出端[6]。按钮组、多路选择开关组为手持控制端控速控向元件,通过控制转向开关向上电机正转,中间停止,向下反转实现电机正反停。控制调速开关实现开关向上高速、中间中速、向下低速。控制电机按钮开关,实现正反停3档开关拨在正或反时按下按钮电机转动,松开按钮电机停止转动。手持控制端电路图及PCB板电路设计图如图3、图4所示。

图3 手持控制端电路图

图4 PCB板设计图
2.2电机驱动端设计
YD-DCMD2-48直流电机模块采用美国IR公司专用的栅极驱动芯片IRS2184加高性能MOS管驱动技术,可对外提供两路“H”桥电路驱动两路直流电机;每一路H桥电路都可以承受48A电流通过,可使用的驱动电源电压7~36V,具有相应速度快,耐压,耐流参数等特点,适合驱动大功率直流电机及需要大电流直流场合,如火花塞驱动、大功率继电器及飞思卡尔智能车等[7]。
主要参数包括:输入电压范围DC7~36V;额定输入电压DC12V/24V/36V;H桥数目2路;每路H桥额定输出电流与峰值输出电流48A/144A;每路H桥额定功率0.576kW(12V)/1.152kW(24V)/ 1.728kW(36V);逻辑控制信号电压2.8~5.5V;工作温度-20~100℃。模块驱动示意图与逻辑引脚分别如图5、表1所示。

图5 电机驱动模块示意图

1IN11IN2PWM1A路“H”桥OUT1,OUT200x停止(无对地电压)11x刹车(对地电压相同)10PWM正转调试(指定方向同向)01PWM反转调试(指定方向反向)
驱动端需要总共驱动5台直流电机,每个驱动模块可以驱动2个电机,因此需要3个驱动模块实现驱动功能。驱动模块与主控制模块连接成逻辑数据口如下:
1)电机驱动模块1 1IN1连接主控制模块P3^3;电机驱动模块1 1IN2连接主控制模块P3^2;电机驱动模块1 PWM1连接主控制模块P3^1,组成1号可调速电机控制口。
2)电机驱动模块1 2IN1连接主控制模块P3^6;电机驱动模块1 2IN2连接主控制模块P3^5;电机驱动模块1 PWM2连接主控制模块P3^4,组成5号可调速电机控制口。
3)电机驱动模块2 2IN1连接主控制模块P2^0;电机驱动模块2 2IN2连接主控制模块P2^1;电机驱动模块2 PWM2连接主控制模块P2^2组成2号电机控制口。
4)电机驱动模块3 2IN1连接主控制模块P2^5;电机驱动模块3 2IN2连接主控制模块P2^4;电机驱动模块3 PWM2连接主控制模块P2^3,组成3号可调速电机控制口。
5)电机驱动模块3 1IN1连接主控制模块P0^0;电机驱动模块3 1IN2连接主控制模块P0^1;电机驱动模块3 PWM1连接主控制模块P0^2,组成4号电机控制口。驱动端硬件布置与硬件连接示意图如图6所示。

图6 电机驱动模块硬件连接示意图
3系统的软件设计
系统在操控时,如果按键信号冲突,造成程序无法读取正确信号。蓝牙模块的工作状态直接影响控制系统的遥控端与驱动端的信号通信。打开电源,蓝牙与主控制模块上电,手持遥控端蓝牙主模块进入监听状态,电机驱动端蓝牙从模块进入等待连接状态。对手持遥控端进行操控,电机驱动端完成指令解析与指令执行。其程序流程如图7所示。


图7 程序流程图
4系统仿真与测试
4.1系统仿真
Keil C51是美国Keil Software公司出品的51系列兼容单片机C语言软件开发系统。C语言在功能、结构性、可读性及可维护性上有明显的优势, Keil提供一个功能强大的仿真调试器,对开发程序进行仿真与调试[8]。
运行Keil软件,打开程序文件,软件自动进行编译,调出I/O端口窗口,窗口对应单片机的P0、P1、P2端口;通过改变端口的高低电平,执行对应电机的控制命令,如使1号电机高速正转,则相应的P2^0和P2^2应该为低电平,将P2端口窗口的第0位和第2位取消勾选,如图8所示。程序执行完成,逻辑分析窗口的仿真信号图线发生对应的高低电平改变,则说明程序执行正确。依据以上操作对各电机的指令进行操作,全部电机的逻辑分析仿真信号图如图9所示。
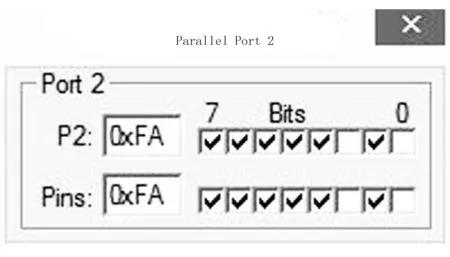
图8 I/O端口电平图

图9 仿真信号图
对仿真信号图的分析表明:对各指令端口操控,端口对应电平变化正确,无指令冲突与错误,程序识别及调用无错误,程序运行正常,可以进行系统的实物制作与测试。
4.2系统测试
依据硬件与软件的设计,对实物进行制作,手持遥控端与电机驱动端实物图,如图10所示。在试验室进行测试时,外接DC36V直流电源,分别依次在电机驱动端的每个驱动模块上连接2台转速800r/min、额定电压36V的直流电机。在电机轴上粘贴纸片,以观察电机的转向与转速变化,判定操作指令执行情况,如图11所示。
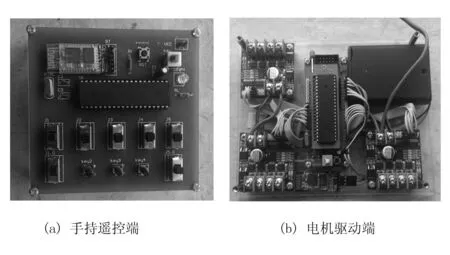
图10 硬件实物图
完成连接后,依次操作转向开关与调速开关对各电机进行转向与转速。

图11 系统测试图
控制、观察电机的执行情况,并记录测试结果,如表2所示。表2中“√”系统运行正常。
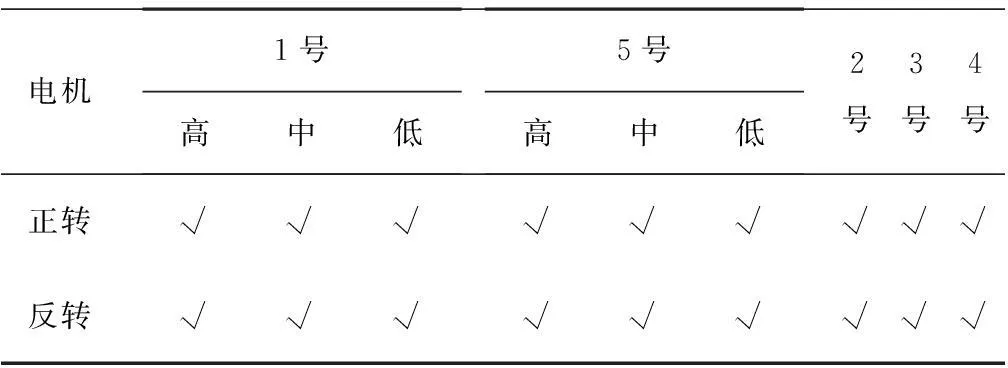
表2 系统测试结果
测试结果表明:系统各部分连接无错误,遥控控制指令在驱动端执行无错误与延迟现象,各电机执行指令正确、响应及时,程序运行稳定可靠。
5结论
以单片机为控制核心,使用蓝牙信号传输、电机驱动模块为控制元件,运用C语言进行编程的控制系统,并进行了程序仿真与实物测试。结果表明:软件与硬件电路连接合理,程序运行稳定可靠,可以实现5台电机的转速、转向控制,满足系统设计目标,为下一步控制系统与喷雾机构总装提供了基础。
参考文献:
[1]阿布力孜·布力布力.新疆红枣发展现状、竞争力分析与战略对策[J].山西果树,2012(4):46-48.
[2]张晓辉.3MG-30型果园弥雾机的研制与试验[J].农业机械学报,2002(5):46-49.
[3]杨志平. 电动力农业机械发展现状和趋势分析[J]. 农业机械,2013(31):103-104.
[4]付字才.单片机控制工程实际技术[M].北京:化学工业出版社,2005.
[5]于海生.微型计算机控制技术[M].北京:清华大学工业出版社,2005.
[6]肖英奎.执行元件及控制[M].北京:化学工业出版社,2011:120-132.
[7]武汉美.单片机应用技术与实践[M].北京:九州出版社, 2012.
[8]高瑞.单片机控制系统的设计与调试方法研究[J]. 科技视界,2015(9):98.
Design of the Control System of Southern Xinjiang Red Jujube Jujube Orchard Sprayer
Zhang Dezhi1, Zhang Qi1, Liao Jiean1, Wang Wei1,2
(1.College of Mechanic and Electrical Engineering,Tarim University,Alar 843300, China; 2.Xinjiang Uygur Autonomous Region General Institutes of Higher Education Key Lab of Modern Agriculture Engineering,Alar 843300, China)
Abstract:To achieve through the control of DC motor, adjust the red dates orchard sprayer spray rod rack height of vertical and horizontal distance, spray pressure, walking speed, to meet the needs of southern xinjiang region red jujube jujube spray agriculture, from two aspects of hardware and software, designing a STC89C52 MCU as the core, motor control system using C language programming, simulation was carried out. Results show that the software and hardware circuit connection and reasonable program runs stable and reliable, can realize more steering control of motor speed, satisfies the requirement of system design.
Key words:jujube; spray machine; motor control; MCU
文章编号:1003-188X(2016)06-0239-05
中图分类号:S491;TP273.5
文献标识码:A
作者简介:张德智(1988-),男,湖南永州人,硕士研究生,(E-mail) 316723281@qq.com。通讯作者:王伟(1979-),男,沈阳人,副教授,硕士生导师,(E-mail)syww77@163.com。
基金项目:国家自然科学基金项目(51265048)
收稿日期:2015-05-31
猜你喜欢
农业开发与装备(2022年7期)2023-01-05
今日农业(2021年16期)2021-11-26
电子制作(2019年13期)2020-01-14
河北果树(2020年2期)2020-01-09
河北果树(2020年1期)2020-01-09
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
中小企业管理与科技(2019年3期)2019-03-07
农机使用与维修(2018年3期)2018-03-23
林业机械与木工设备(2017年3期)2017-03-08
