
一种种苗移栽机自动取苗送苗装置
2016-03-23 06:45徐广鹏张闯闯杨铁钢刘存祥李晓虎
农机化研究 2016年6期
关键词:自动
徐广鹏,张闯闯,杨铁钢,刘存祥,李晓虎
(1.河南农业大学 机电工程学院,郑州 450002;2.河南省农科院 经济作物研究所,郑州 450002)
一种种苗移栽机自动取苗送苗装置
徐广鹏1,张闯闯1,杨铁钢2,刘存祥1,李晓虎1
(1.河南农业大学 机电工程学院,郑州450002;2.河南省农科院 经济作物研究所,郑州450002)
摘要:在了解国内外旱地栽植技术和移栽机的发展现状及存在问题的基础上,研制了一套种苗自动取苗送苗机构。该装置采用PLC程序进行控制,使分苗系统和送苗系统按照各自的要求实现其动作,完成所需要的功能。该机构是一种集自动取苗、送苗、放苗于一体的多功能机电气一体化装置,可在种苗移栽的过程中代替人力来实现取苗、送苗的操作,且可应用于棉花、番茄、玉米等作物穴盘育苗的种苗移栽。
关键词:移栽机;取苗;送苗;自动
0引言
目前,我国的旱地作物大部分都还是采用播种、自动出苗、间苗、中期管理等阶段进行种植。种苗移栽有许多优点:可以延长作物的大田生长周期,减少由于直接种植而出现的漏播、缺苗、苗生长势差异较大等缺陷[1-2]。研究表明,在适宜的时间段采用机械移栽,能够使产量大幅度提高(20%~25%,品质更优[3])。因此,多种作物采用了移栽种植方式(如甜玉米、番茄、辣椒、烤烟、棉花等),种苗移栽种植机械具有广阔的应用前景。
长期以来,我国旱地作物的移栽,从穴盘育苗到种苗移栽入土,中间的工作环节大部分依靠人力来完成,劳动强度大,且效率低下;特别是农忙季节,由于大部分农民外出打工,劳动力短缺,稍有耽误,就容易贻误农时,影响产量[4-5]。我国研制移栽机已有30年多的历史,某些方面取得了一定突破,对我国旱地作物及大部分蔬菜的发展起到了一定的促进作用[6],但仍存在如下一些问题:半自动移栽机必须在人工送苗的情况下,才能正常地完成工作;人工取苗、送苗过程中速度不能太快,否则人容易疲劳,造成漏苗现象[7]。目前使用的一些移栽机械,基本都是采取人工取苗、送苗进行移栽作业;人工取苗、送苗环节的速度限制及移栽过程中占用了过多的劳动力,制约了种苗移栽机械的大面积应用[8-9]。
研制新型自动取苗、送苗机构将提高整个移栽机械的效能和价值[10]。因此,开展自动取苗、送苗装置的设计与试验研究,对于旱地自动移栽机的发展具有重要意义[11]。
为此,笔者研制了一种种苗移栽机自动取苗、送苗装置,可在种苗移栽的过程中代替人力来完成取苗、送苗的过程。
1自动取苗送苗机构及工作原理
该装置由自动取苗和送苗两部分组成,结构如图1所示。
1.1自动取苗系统
该系统由无杆气缸滑块位置传感器、起苗工作台、横向移动气缸、气动制动装置、无杆气缸、直线导轨、垂直方向双杆气缸及机械手等组成。图2为夹取动作的工作过程。工作时,由PLC对相应元件进行控制,实现机械手自动连续取苗过程。PLC控制电磁阀给无杆气缸通入气体,使无杆气缸滑块上的起苗工作台从起始位置在直线导轨上运动,通过设定相应的无杆气缸滑块位置传感器,使起苗工作台带动机械手在到达要抓取种苗行的位置后,在气动制动装置作用下停止;通过PLC控制,机械手由张开状态到闭合状态,待机械手夹住种苗以后,对垂直方向双杆气缸通气,使机械手带动种苗向上提升一定的距离;再对无杆气缸通气,使无杆气缸的滑块带动与其相连的起苗工作台回到起始位置上方,对垂直方向双杆气缸放气,使机械手带动种苗下落到起始位置;松开机械手,种苗由于自重作用掉入导苗管里,完成该行的一次取苗动作;然后,通过PLC控制横向移动气缸,推动垂直方向双杆气缸的整体位置沿横向移动滑杆移动1个穴孔距离,使机械手对应该行的间隔孔穴剩下的种苗,再重复前面的取苗动作,把本行剩下的种苗取走,送入导苗管里。
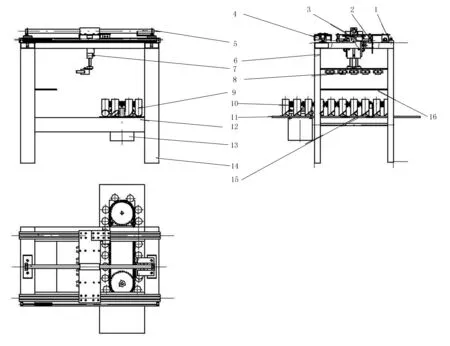
1.无杆气缸滑块位置传感器 2.起苗工作台 3.横向移动气缸 4.气动制动装置 5.无杆气缸 6.直线导轨 7.垂直方向双杆气缸

图2 夹取动作的工作过程
横向移动气缸运动规律如图3所示。每盘苗第1次抓取苗后横向移动1个穴孔距离,此后每两次抓取苗后横向移动1个穴孔距离;如此往返运动,直到把穴盘中所有行数的种苗全部送入导苗管里。
1.2自动送苗系统
该系统(见图1)由导苗管、链轮传动装置、活门、水平固定板、步进电机等组成。工作时,通过PLC控制步进电机转动,从而带动链轮传动装置上的导苗管在水平固定板上滑动;待导苗管转到水平固定盘上的拱形缺口时,活门在其自身重力、种苗及所带基质重力的作用下,向下自动打开,种苗由于自重掉入下边的移栽机吊篮内;吊篮转动到地面自动打开放下种苗,覆土轮覆土固定种苗,完成种苗移栽操作。

图3 横向移动气缸运动规律
2自动取苗系统的研制
该系统利用机械手取苗,然后将种苗送入导苗管。依据取苗的工作原理,该系统的研制主要包括两部分:①机械手系统;②气动定位系统。
2.1机械手系统
该系统的应用对象是种苗,种苗高度范围定为100~200mm。依据各种机械手的特点,该系统选用Y型气动手指(缸径16mm)作为取苗的工具,也可以选用液压、电动和机械式驱动机械手作为取苗的工具。鉴于种苗易于被夹伤,在气动手指上固定了较软的海绵垫片。由于单个机械手的宽度为30.6mm,而选用苗盘的规格为10×20(行×列)穴,其外形尺寸为280mm×540mm,所以采用1排固定5个机械手的方案对种苗进行隔行抓取,1次可以抓取5棵种苗,1行种苗需要2次抓取。图4为气动手指的排布方案。
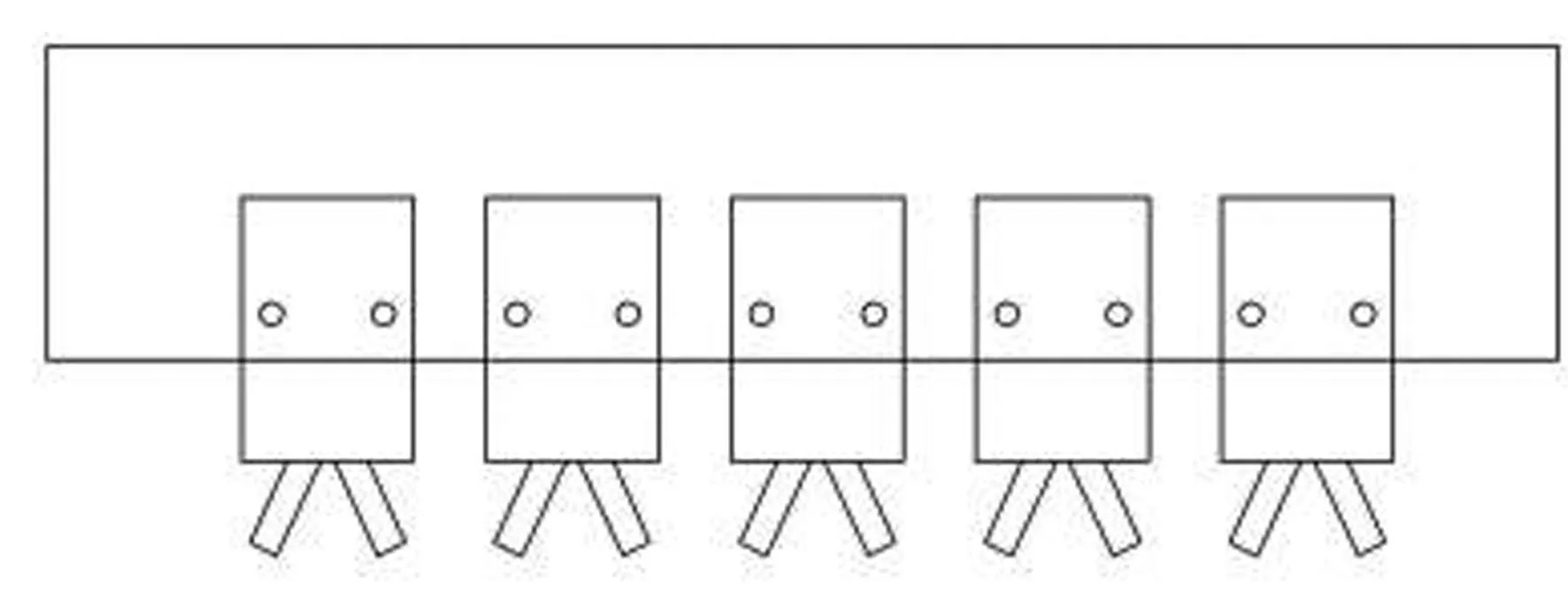
图4 气动手指的排布方案
选用PLC(型号为CP1H-X40DR-A)作为控制单元,通过PLC对相应元件的控制实现机械手自动连续取苗过程,其动作包括带动机械手自动上升、下降、前移、后移、左移和右移,以及机械手夹紧、松开。这些动作分别由各自的电磁阀来控制相应执行元件,完成相应的动作;此外,可手动控制机械手完成夹住种苗和松开种苗的功能。在编写程序中,增加了互锁回路保护,以防止发生误动作而引起事故。
2.2气动定位系统
根据该系统的研制要求,选用了型号为CY1B25-900的磁偶式无杆气缸,其定位原理如图5所示。气动定位系统由气缸控制阀(三位五通)、制动阀(二位五通)、无杆气缸滑块位置传感器(图1中序号1)、无杆气缸(图1中序号5)及无杆气缸滑块位置控制器(即图1中气动制动装置4)等组成,可实现任意点的柔性定位和无级调速。
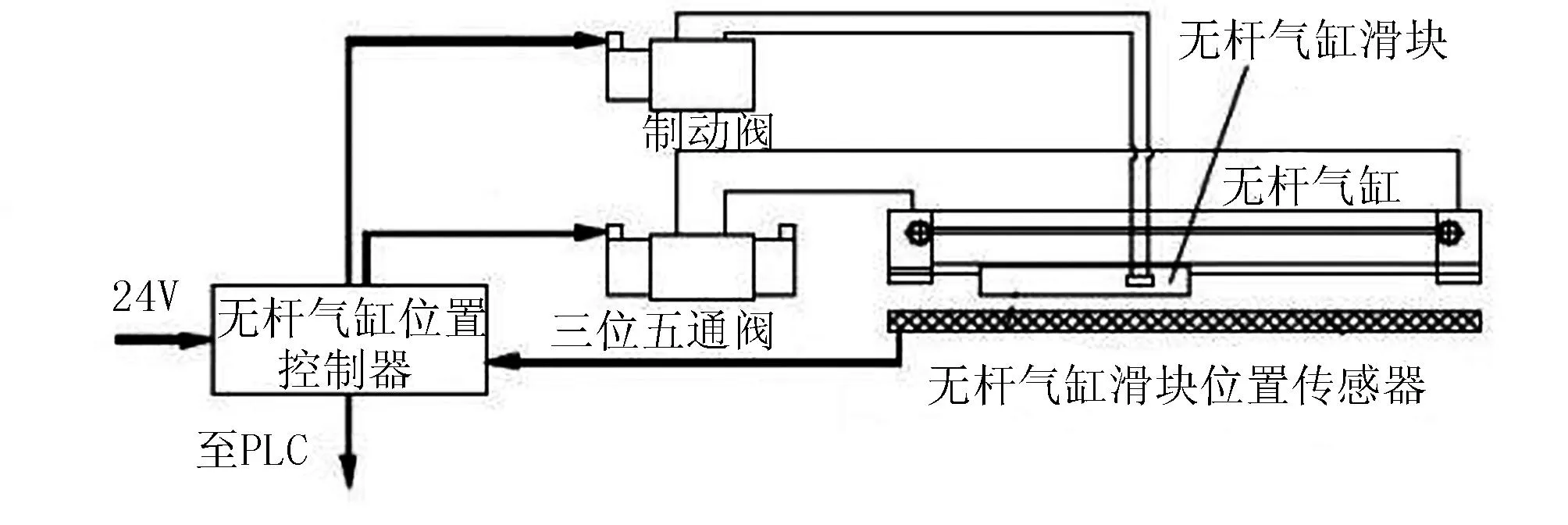
图5 气动伺服定位系统原理示意图
当取苗时,要求无杆气缸滑块带动气动手指到达正确位置±5mm范围内停止。笔者采用不同的压力来测试气动手指的停止位置,以确定无杆气缸的可靠性。分别采用0.20、0.25、0.30、0.35MPa的压力,结果显示气动手指停止的位置距离正确的位置相差很大,因此仅靠无杆气缸自身不能精确定位,无法满足工况要求。因此,设计了一个气动制动装置(见图6),在气动手指到达正确位置需停止时,无杆气缸滑块位置信号传给PLC,PLC控制图中的气缸进气,气缸推动摩擦片与直线导轨摩擦,起到制动的作用,使无杆气缸滑块带动气动手指停止在要求位置。

1.气缸固定板 2.气缸 3.摩擦片 4.直线导轨
安装气动制动装置以后,再次对制动系统进行测试,气动手指停止位置距离正确位置的距离均在±5mm内,能够满足试验的要求。
3自动送苗系统的研制
该系统受同一PLC控制,利用步进电机的精确定位,带动送苗机构运动,保证完成机械手放种苗到导苗管的同步,并使导苗管里的种苗行走一段距离后落入移栽机的吊篮里。种苗的送苗机构的结构如图7所示。

1.链条 2.导苗管 3.链轮
依据送苗的工作原理,该系统选用了型号为2S130Y-063R8的步进电机,采用链条作为传动方式。其余的研制内容主要包括以下3个部分:①导苗管的设计;②活门机构的设计;③导苗嘴的设计。
3.1导苗管
由于种苗在育苗期间肥水不均,造成个别种苗枝叶较大,导苗管直径的大小直接影响落苗的通畅性。通过多次试验确定导苗管直径为50mm、高度为135mm时,不出现挂苗现象。导苗管比种苗高些时,种苗在投送的过程中会有一定的初速度,在惯性的作用下使枝叶合拢,而合拢后的种苗在重力作用下可顺利地向下滑落。
3.2活门机构
为使种苗在导苗管中随导苗管运动时不至于夹苗根(直接让种苗底部与固定盘相互摩擦运动容易伤苗根),在导苗管下侧安装45°倾斜活门机构,使活门在行至拱形缺口处自然打开;落苗完成后,活门随导苗管继续前行,由水平固定板关闭活门。
3.3导苗嘴
为使种苗顺利地从导苗管落入移栽机的吊篮内,将导苗嘴设计成上大下小的倒椎形;且一侧板倾斜15°~20°,以便当种苗下落时获得水平横向运动的速度,从而减小种苗落入吊篮时所受到的冲击。
4结论及建议
该样机在室内进行试验,实现了自动取苗、送苗的过程,达到了预期效果。由于时间仓促,样机没有和移栽机相连进行大田试验,尚需进一步的改进。建议如下:
1)在后续开发或者生产中,可考虑采用丝杠螺母机构、滚珠丝杠机构传动来代替无杆气缸传动,以减少可能由于定位不准出现的问题。
2)由于整机涉及的部件较多,需要大量试验以便发现设计制造中的缺陷;针对出现的缺陷进行研究分析,确定解决方案,提高其可靠性。
3)后续开发或者生产中,增加检测导苗管有无种苗系统,以克服漏栽现象。
参考文献:
[1]方宪法.我国旱作移栽机械技术现状及发展趋势[J].农业机械,2010(1):35-36.
[2]符美军,全腊珍,熊耐新,等.棉花裸苗移栽机自动送苗机构的设计与仿真分析[J].湖南农业大学学报,2012,38(4):451-454.
[3]盛良伟.玉米育苗移栽高产高效原因与配套技术[J].云南农业科技,1997(3):29-30.
[4]吴畏,孙松林,肖名涛.我国移栽机械的现状与发展趋势[J].农业技术与装备,2013(12):7-8,10.
[5]王君玲,高玉芝,李成华.旱地钵苗移栽机械化生产的现状及发展趋势[J].中国农机化,2003(10):12-14.
[6]赵匀,樊福雷,宋志超.反转式共轭凸轮蔬菜钵苗移栽机构的设计与仿真[J].农业工程学报,2014,31(7):8-16.
[7]蔡承智,陈埠.对我国农业可持续发展农业途径的探讨[J].中国农机化,2002(1):36-37.
[8]王侨,曹卫彬.穴盘苗自动取苗机构的自适应模糊PID定位控制[J].农业工程学报,2013,30(6):32-38.
[9]卢永涛,李亚雄,刘洋,等.国内外移栽机及移栽技术现状分析[J].新疆农机化,2011(3):29-30.
[10]于红松,张铁中,杨丽. 穴盘苗自动移栽机研究现状与发展前景[J]. 农业机械,2008(20):44-45.
[11]裘利钢,俞高红.蔬菜钵苗自动移栽机送苗装置的设计与试验[J].浙江理工大学学报,2012(9):683-687.
An Automatic Picking Seedling and Feeding Seedling Device of the Seedling Transplanting Machine
Xu Guangpeng1, Zhang Chuangchuang1, Yang Tiegang2, Liu Cunxiang1, Li Xiaohu1
(1.College of Mechanical and Electrical Engineering, Agricultural University of Henan, Zhengzhou 450002, China; 2.Economic Crops Research Institute ,Henan Academy of Agricultural Sciences, Zhengzhou 450002, China)
Abstract:This paper designed an automatic picking seedling and feeding seedling device on the foundation of knowing the development status and existing problems of dry land transplanting technology and transplanting machine at home and abroad. The control system took advantage of PLC program so that the picking seedling and feeding seedling system realized action to complete required functions according to the respective requirements.This system was a multifunctional electrical integration device that could pick, send and feed seedling in one set, which could replace manpower in the process of transplanting. It could be applied to plug seedling transplanting of cotton, tomato, corn and other crop.
Key words:transplanting machine; picking seedling; feeding seedling; automatic
文章编号:1003-188X(2016)06-0249-04
中图分类号:S223.92
文献标识码:A
作者简介:徐广鹏(1990-),男,河南商丘人,硕士研究生,(E-mail)xuguangpeng@163.com。通讯作者:刘存祥(1958-),男,郑州人,教授,(E-mail)13598881238@139.com。
基金项目:河南省科技攻关计划项目(142102110055)
收稿日期:2015-04-30
猜你喜欢
疯狂英语·新读写(2022年1期)2022-11-23
纺织科学研究(2021年6期)2021-07-15
学生天地(2020年5期)2020-08-25
电子制作(2019年10期)2019-06-17
小学生优秀作文(低年级)(2018年3期)2018-02-08
车迷(2017年12期)2018-01-18
小天使·一年级语数英综合(2017年3期)2017-04-25
莫愁(2017年9期)2017-04-07
山东工业技术(2016年15期)2016-12-01
汽车博览(2016年9期)2016-10-18
