
一种相似性框架下基于非线性扩散过程的剩余寿命估计模型
2016-04-01 03:52裴洪胡昌华王兆强张正新张会会
中国测试 2016年11期
裴洪,胡昌华,王兆强,张正新,张会会
(火箭军工程大学302室,陕西西安710025)
一种相似性框架下基于非线性扩散过程的剩余寿命估计模型
裴洪,胡昌华,王兆强,张正新,张会会
(火箭军工程大学302室,陕西西安710025)
剩余寿命(residual life,RL)估计是预测与健康管理(prognostics and health management,PHM)的关键环节。目前,传统的基于相似性的RL估计模型仅利用失效设备的退化数据,忽略截断设备和运行设备的退化数据,难以保证RL的估计精度。针对该问题,在相似性框架下提出一种新的基于扩散过程的RL估计模型。首先基于扩散过程对截断设备进行退化建模和RL估计,然后通过比较参考设备(失效设备与截断设备)和运行设备间的相似性,同时利用参考设备与运行设备的退化数据实现运行设备的RL估计。最后仿真实验验证该文模型优于传统的基于相似性的模型。研究结果表明:该文模型能够显著提高运行设备RL的估计精度,具有潜在的工程应用价值。
剩余寿命;扩散过程;相似性;参考设备
0 引言
随着对工程设备安全性和可靠性要求的不断提高,预测与健康管理(PHM)技术受到了学术界和工业界的普遍关注[1]。作为一种新兴技术,PHM能够提高设备的可靠性和安全性、降低失效事件发生的概率,对于航空航天、武器装备及工业制造等领域至关重要[2,3]。作为PHM的重要环节,剩余寿命(RL)估计可为PHM技术中决策活动(如最优维护、备件订购等)的有效开展提供前提和基础。因而,近年来RL估计成为当前研究中的热点问题,并涌现出了大量的研究成果[4-6]。
现有的RL估计方法主要可以分为失效物理分析和数据驱动2类方法[1]。失效物理分析方法通过事先获取设备的物理失效机制进而实现其RL估计。在实际工程中,对于大型化或复杂化设备来说,事先获取物理失效机制的难度很大,同时对于一些价格昂贵的设备来说,物理模型的获取成本过高[6]。随着传感器技术和状态检测技术的发展,数据驱动的方法凸显出特有的优越性。当前数据驱动的方法大致分为传统的RL估计方法和基于退化建模的RL估计方法。传统的RL估计方法通过对设备的寿命数据进行分析进而确定寿命的概率分布。然而,随着科技的进步,实际设备的寿命和可靠性不断提高,通常难以获取足够的寿命数据,尤其是对于一些价格昂贵的设备来说,获取寿命数据的经济成本过高甚至难以承受,这使得传统的RL方法在实际中常常难以适用。基于退化数据的方法不仅能够降低实验成本,而且能够提高RL估计的精度,已成为目前的主流方法[4]。事实上,不仅可以从总体中获得失效设备或截断设备的退化数据,而且可以获得运行设备自身的退化数据。如何有效地利用这些数据实现设备RL的估计是当前研究的重点[1-8]。
由于设备内部结构和使命任务的相似性,同类设备间的退化过程或退化数据必然具有某种相似性。近年来,考虑同类设备间相似性的退化建模和RL估计方法,即基于相似性的方法,已逐步引起了国内外学者的关注,并取得了较好的实际应用效果。Wang等[9]针对失效设备足够多的情况通过构建退化数据库,提出了一种基于相似性的RL估计的方法。Zio等[10]基于相似性方法采用隶属度函数衡量设备间相似度,进而确定RL估计值。文献[11]基于在不同监测点运行设备与参考设备间相似性所占权重具有差异性,提出一种广义的相似性模型进行RL估计,进一步推广了基于相似性的方法,提高了RL估计精度。文献[12]在相似性的框架下,利用失效设备的退化数据主要研究了权重函数对估计精度的影响、RL估计的鲁棒性以及RL估计的不确定性。然而,上述方法均忽略了截断设备的退化数据和运行设备的自身退化数据,在一定程度上无法保证RL估计精度。You等[13]在相似性框架下利用失效设备和截断设备的退化数据对RL进行估计,然而该方法采用传统相似性方法对截断设备的RL进行估计,并且将截断设备看成失效设备,具有一定的局限性。鉴于此,本文在相似性框架下提出一种基于非线性扩散过程的RL估计方法。利用参考设备的退化数据和运行设备的退化数据,通过比较参考设备与运行设备间的相似性确定参考设备的权重,与文献[13]的不同在于基于扩散过程模型确定截断设备的RL,进而实现运行设备的RL估计。数值仿真验证了本文模型能够提高RL的估计精度。
1 问题描述
基于相似性的RL估计方法主要通过分析失效设备与截断设备的RL权重,进而实现运行设备的RL估计。基于相似性的RL估计方法的关键要素如图1所示。其中,D表示运行设备和参考设备间相似性测量的时间范围,s(·)为测量两种设备之间相似性的测度函数,如概率或欧式距离[9],表示在第k个状态监测点运行设备与第i个参考设备间的相似性。权重函数w(·)根据不同参考设备与运行设备间的相似性确定其权重,并将相似性代入权重函数中得到权重w(so↔ri(k)),用wi(k)表示。PRL0(k)表示运行设备在第k个状态监测点的RL估计值,RRLri(Ni(k))表示第i个参考设备在第k个状态监测点的RL,Ni(k)为监测点数目。

图1 基于相似性的RL估计方法的关键要素
传统的基于相似性的方法均假定参考设备为失效设备,而工程设备的失效往往会造成人员伤亡和财产损失,故有限的失效设备限制了传统的基于相似性方法的适用性。文献[13]同时考虑了失效设备和截断设备的退化数据,拓宽了参考设备的范畴,但在实际工程中,截断设备即在实际运行过程中未发生失效的设备,因而无法预知截断设备的实际RL,因而文献[13]仅简单地将截断设备看成失效设备,仍采用传统相似性的方法进行RL估计,难以保证估计的精度。针对该问题,本文主要考虑基于扩散过程的模型对截断设备的RL进行估计,进而实现运行设备的RL估计。
基于以上分析,本文主要研究以下问题:
1)如何基于扩散过程模型对截断设备的RL进行估计。
2)如何将步骤1)得到的截断设备的RL估计结果融入相似性的框架内,利用运行设备和参考设备的退化数据提高RL估计精度。
2 相似性框架下基于扩散过程的RL估计
2.1 截断设备的RL估计
扩散过程模型已广泛应用于设备退化模型构建和RL估计之中[7,14]。常见的基于扩散过程的退化模型[7]可以表示为

式中:Y(t)——设备在t时刻的退化量;
y0——退化量初始值;
λ——漂移系数的尺度参数;
θ——漂移系数的形状参数;
σB——扩散系数;
B(t)——标准布朗运动。
对于一批设备来说,由于制造工艺及运行环境的差异性,每个设备的退化路径总会存在差异性。因而,令λ为服从正态分布的随机参数,即,以刻画出同类不同个体设备间的差异性[7,14]。
设备的失效时间通常定义为公式(1)所示的退化过程首达既定失效阈值ω的时间,即首达时间[14-15]。基于首达时间的概念,tk时刻的RL可以定义为,根据文献[7],不考虑λ的随机性时tk时刻RL的概率密度函数(probability density function,PDF)可以表示为


可以得到随机参数作用下RL的PDF,其中,f(λ)为随机参数λ的PDF。
假定有N组截断设备的历史退化数据,对于截断设备i(i=1,2,…,N),在ti1,ti2,…,tini时刻,测得了设备i的ni个退化量,记作Yi=(Yi(ti1),Yi(ti2),…,Yi(tini))T。因而,截断设备i的退化模型可以表示为

其中j=1,2,…,ni。令,根据文献[7],Yi服从多变量正态分布,其均值和协方差分别为

分别求似然函数对μλ和σλ的一阶偏导数,可以得到如下结果:


参数估计完成后,将进行RL的PDF的推导,对于式(1)定义的非线性随机退化过程,则tk时刻以w为阈值的RL的PDF可以表示为

对于第i台截断设备在tR时刻的RL的期望值可表示为,那么如何利用这类数据,即如何将扩散过程融入相似性框架中,将在下节讨论。
2.2 相似性框架下运行设备的RL估计
图2总结了相似性框架下基于扩散过程的RL估计方法。其中,Q为失效设备的数目,P为截断设备的数目,SRL(k)为截断设备在第k个状态监测点的RL。A步中,利用截断设备的退化数据,基于扩散过程方法对截断设备的RL进行估计。B步中,利用全部退化过程,在该框架下估计运行设备第k个状态监测点的RL。从图2可以看出,H为非负整数并且(H+1)·Δt=D,即图1中的时间间隔,B步中,利用连续H+1个状态监测点测量参考设备和运行设备间的相似性。实际工程中,H或D由专家给定,根据H+1个监测点可以获取运行设备的当前状态,下节将深入研究H对RL估计的影响。

图2 相似性框架下基于扩散过程的RL估计流程
令y0(k·Δt)表示运行设备第k个监测点的退化量,其中Δt为状态监测间隔,k为正的监测数。令yri(k·Δt)表示参考设备i第k个监测点的退化量。本文选择欧式距离函数测量运行设备和参考设备间的相似性:

式中,s(k,H,i,m)表示运行设备在[(k-H)·Δt,k·Δt]区间的退化过程与参考设备i在[(m-H)· Δt,m·Δt]区间的退化过程间的相似性,对于运行设备有k≥H+1,对于失效设备有H+1≤m≤Mi,对于截断设备有H+1≤m≤Gi。其中,Mi表示失效设备i的监测点数目,Gi表示截断设备i的监测点数目。根据式(7),在第k个监测点,参考设备i与运行设备间的相似性可以表示为
其中q,p为正整数。
在计算so↔ri(k)时,Ni(k)能够表示为

第i个参考设备在Ni(k)监测点的RL估计值可以表示为

根据文献[11],权重函数可定义为

其中,zi(k)定义为

式(16)中,参数α决定了分配到每台参考设备的权重,文献[12]研究了α对基于相似性的退化模型的影响。
根据式(15)中定义的权重和式(14)中参考设备的RL,可以得到运行设备在第k个状态监测点的RL估计值:

通过上述分析,基于图2中的流程框图,运行设备RL估计的算法概括如下。
步骤1:利用截断设备的历史退化数据实现基于扩散过程模型的参数估计;
步骤2:基于式(14)利用步骤1的参数估计结果实现参考设备(截断设备或失效设备)i在监测点Ni(k)的RL估计;
步骤3:基于相似性定义和式(15),利用参考设备的全部退化数据与运行设备自身的退化数据确定每个参考设备相对于运行设备的权重wi(k);
步骤4:基于式(17)能够确定运行设备在第k个状态监测点的RL估计值PRL0(k),实现运行设备RL的实时估计。
3 实验研究
本节通过数值仿真产生10组失效设备、9组截断设备及1组运行设备的退化数据,假定退化数据单位为mm,利用本文方法与传统的基于相似性的方法[16]分别估计运行设备的RL,并比较本文方法与传统的基于相似性的方法间的RL估计结果。
3.1 数值仿真
利用式(1)定义的模型产生仿真数据,参数设定如下:μλ=1,σλ=0.1,σB=1,θ=0.9,且Δt=1h。根据2.1节提到的首达时间定义,一旦退化数据超出了阈值,意味着设备发生失效,本文令ω=50 mm。图3描绘了20组带有失效阈值的退化过程。
根据式(1)随机仿真得到20组超过失效阈值的退化过程,作为参考设备和运行设备的退化过程,对本文方法进行评估。由于仿真得到的数据均超出了失效阈值,故为失效设备的退化过程。为获取截断设备的退化过程,随机选取9组仿真过程作进一步裁剪,裁剪后的退化过程可作为截断设备的退化过程。随机选取常数Tr,如Tr=60 h,并且移走Tr与失效时刻间的退化过程,即可获取截断设备的退化过程。根据截断设备的数目选择Tr,一旦Tr确定后,设备的退化过程在监测点Tr不会超出阈值。基于图3的仿真数据,图4给出了9组截断设备的退化过程。
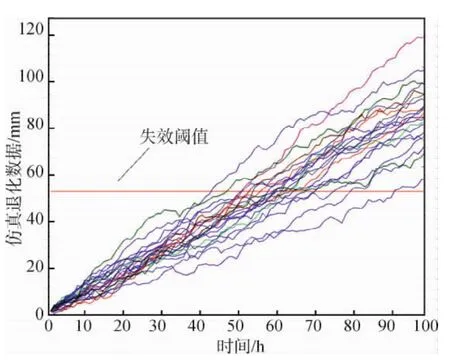
图3 20组带有阈值的仿真退化轨迹

图4 9组截断退化过程
3.2 结果和讨论
首先,将3.1节中的20组仿真数据代入传统的基于相似性的方法和本文模型中,运行设备的RL估计值如图5所示。从图5可以明显看出,本文模型和基于传统相似性方法均能显示出运行设备的RL趋势,但本文模型更加精确。在退化过程的初期,运行设备的退化数据较少,两种方法的RL估计值均偏离了实际RL,但本文方法的偏离程度相对较小;随着退化数据的不断获取,两种方法的偏离程度逐渐减小,当实际的RL很小时(t=40 h后),两种方法的PRL非常接近。因为当运行设备将要失效时,能够获得足够多的运行设备的退化数据,能够准确计算运行设备与参考设备间的相似性,因而对于两种方法,运行设备的RL估计值PRL(k)与实际RL相差不大。

图5 运行设备的PRL

图6 RL估计值的估计误差
为了定量比较运行设备的RL估计精度,这里引入RL估计值的估计误差(AE)评价RL估计的精度,估计误差可以表示为

其中,PRL0(k)表示运行设备在第k个状态监测点的RL估计值,ARL0(k)表示设备在第k个状态监测点的实际RL。RL估计值的估计误差如图6所示。可以看出,在运行设备的寿命周期内,本文模型的RL估计误差均小于基于传统相似性方法的RL估计误差,且本文模型的RL估计误差波动较小,因而本文模型优于传统的基于相似性的方法。
根据上述研究,非负整数与RL估计有着密切关系。本文选择非负整数H=2,5,8,10,13,18,并且利用3.1节中的20组仿真数据研究H的影响。为量化H的影响,RL估计效果G可定义为
其中,n为运行设备的全部状态监测点,ARL0(k)表示设备在第k个状态监测点的实际RL。
根据式(19),能够得到RL估计效果,结果如图7所示。
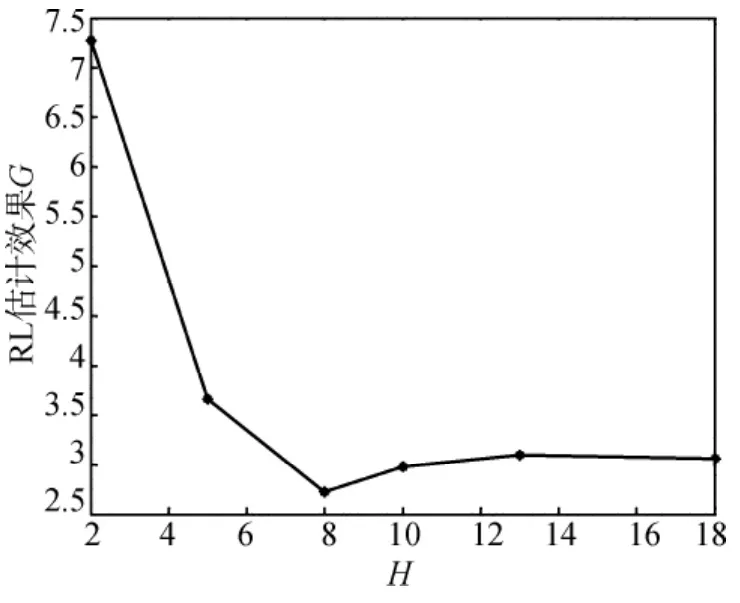
图7 不同非负整数H下的RL估计效果
从图中能够直观看出,H的取值与RL估计效果有着密切关系。当H值很小时(如H=2),RL估计效果G的值很大,即本文方法效果较差。在一定范围内,随着H的增加,RL的估计效果将明显提高。因此,当缺乏先验知识时,H值应该较大一点,但当H值超过一定范围内,RL的估计效果将会降低,因为H值选择太大时,本文方法的复杂性将大大增加。故根据图7可得H=8时RL估计效果最佳。
4 结束语
本文针对非线性随机退化设备,在相似性的框架下,提出一种基于非线性扩散过程的RL估计方法。首先基于扩散过程构建随机退化模型,利用截断设备的退化数据实现其RL的估计;然后基于相似性原理确定参考设备相对于运行设备的权重,最后实现运行设备的RL估计。数值仿真验证了本文方法优于传统的基于相似性的方法。研究结果表明,本文综合利用失效设备和截断设备的退化数据,提高运行设备的RL估计精度,因而在工程实际中,更具有潜在应用价值。
[1]PECHT M G.Prognostics and Health Management of Electronics[M].John Wiley:New Jersey,2008:201-211.
[2]司小胜,胡昌华,周东华.带测量误差的非线性退化过程建模与剩余寿命估计[J].自动化学报,2013,39 (5):590-601.
[3]李明福,胡昌华,周志杰,等.基于退化数据的贮存设备最优检测策略[J].系统工程与电子技术,2015,37 (5):1219-1223.
[4]SI X S,WANG W B,HU C H,et al.Remaining useful life estimation—A review on the statistical data driven approaches[J].European Journal of Operational Research,2011,213(1):1-14.
[5]WANG Z Q,HU C H,WANG W B,et al.A simulationbased remaining useful life prediction method considering the influence of maintenance activities[C]//Proc.of the Prognostics and System Health Management(PHM) Conference,2014:284-289.
[6]SHEN Y,TANG L C,XIE M.A model for upside-down bathtub-shaped mean residual life and its properties[J].IEEE Transactions on Reliability,2009,58(2):425-431.
[7]SI X S,WANG W B,HU C H,et al.Remaining useful life estimation based on a nonlinear diffusion degradation process[J].IEEE Transactions on Reliability,2012,61 (1):50-67.
[8]WANG W B,CARR M,XU W J,et al.A model for residual life prediction based on Brownian motion with an adaptive drift[J].Microelectronics Reliability,2011,51(1):285-293.
[9]WANG T,YU J,SIEGEL D,et al.A similarity-based prognostics approach for remaining useful life estimation of engineered systems[C]//Proceedings of International Conference on Prognostics Health Manage,Denver,2008.
[10]ZIO E,MAIO F D.A data-driven approach for predicting the remaining useful life in dynamic failure scenarios of a nuclear system[J].Reliability Engineering and System Safety,2010,95(1):49-57.
[11]YOU M Y,MENG G.A generalized similarity measure for similarity-based residual life prediction[J].Proceedings of the Institution of Mechanical Engineers,Part E:Journal of Process Mechanical Engineering,2011,225(3):151-160.
[12]YOU M Y,MENG G.Toward effective utilization of similarity based residual life prediction methods:Weight allocation,prediction robustness,and prediction uncertainty[J].Proceedings of the Institution of Mechanical Engineers,Part E:Journal of Process Mechanical Engineering,2013,227(1):74-84.
[13]YOU M Y,MENG G.A framework of similarity-based residual life prediction approaches using degradation histories with failure,preventive maintenance,and suspension events[J].IEEE Transactions on Reliability,2013,62(1):127-135.
[14]WANG Z Q,HU C H,WANG W B,et al.An Additive Wiener Process-Based Prognostic Model for Hybrid Deteriorating Systems[J].IEEE Transactions on Reliability,2014,63(1):208-222.
[15]LEE M L T,WHITMORE G A.Threshold regression for survival analysis:Modeling event times by a stochastic process reaching a boundary[J].Statistical Science,2006,21(4):501-513.
(编辑:李妮)
A model for residual life estimation based on the nonlinear diffusion process under the framework of similarity
PEI Hong,HU Changhua,WANG Zhaoqiang,ZHANG Zhengxin,ZHANG Huihui
(302 Unit,Rocket Force University of Engineering,Xi’an 710025,China)
Residual life(RL)estimation is a key part in prognostics and health management(PHM).In current literature,traditional similarity-based RL estimation model can only utilize the degradation data of failed devices,while ignoring the degradation data of suspended devices and operating device,which cannot guarantee the accuracy of the RL estimation.Aiming at this issue,this paper develops a new diffusion process driven RL estimation model in the framework of similarity.Firstly,the degradation model is constructed and the RL of the suspended devices is estimated.And then the observed degradation data from the reference devices(i.e.failed and suspended devices)and the operating device are utilized to estimate the RL of the operating device by comparing the similarity between the operating device and reference devices.Finally,a numerical simulation is provided to substantiate the superiority of the proposed model over the traditional similarity-based approach.The research result shows that the proposed model can remarkably improve the accuracy of the RL estimation for the operating device,which can be potentially applied in practice.
residual life;diffusion process;similarity;reference devices
A
1674-5124(2016)11-0006-07
10.11857/j.issn.1674-5124.2016.11.002
2016-04-13;
2016-06-20
国家杰出青年基金(61025014);国家自然科学基金(61174030,61374120,61573365)
裴洪(1992-),男,安徽霍邱县人,硕士研究生,专业方向为预测与健康管理。
猜你喜欢
公民与法治(2022年10期)2022-12-29
数学物理学报(2022年5期)2022-10-09
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
河北画报(2020年8期)2020-10-27
水电站设计(2020年4期)2020-07-16
中学生数理化·高一版(2019年12期)2019-12-31
中国钢铁业(2018年6期)2018-07-26
浙江大学学报(工学版)(2016年2期)2016-06-05
中国钢铁业(2014年4期)2014-08-22
