
旋转加速度计重力梯度仪标定方法
2016-04-19 09:08钱学武蔡体菁
中国惯性技术学报 2016年4期
钱学武,蔡体菁
(东南大学 仪器科学与工程学院,南京 210096)
旋转加速度计重力梯度仪标定方法
钱学武,蔡体菁
(东南大学 仪器科学与工程学院,南京 210096)
提出一种旋转加速度计重力梯度仪标定方法,在重力梯度仪外侧空间确定的四个位置上依次放置一定质量的检测质量体,根据检测质量体在正交位置上引起的重力梯度大小相等,符号相反的关系确定出重力梯度标度系数,采用旋转重力梯度仪本体方式确定出重力梯度零位。给出了重力梯度零位和标度系数计算表达式,在重力梯度半物理仿真系统上进行了仿真试验验证,仿真结果表明,标定后重力梯度测量误差小于1E。
重力梯度仪;旋转加速度计;检测质量体;梯度标定
高精度重力梯度测量在地球科学、空间科学、地质科学、能源勘探以及惯性导航等领域具有非常重要的应用价值和广泛的应用前景。重力梯度测量相对于重力测量具有明显的优势,对于地质结构的形状、尺寸和埋藏深度等信息,重力梯度测量能够提供更高的解析度,特别适合于探测局部地质结构及其细节[1-4]。目前,国外正在进行研究具有应用前景的重力梯度仪主要有旋转加速度计重力梯度仪、超导重力梯度仪、冷原子重力梯度仪等,其中旋转加速度计重力梯度仪技术最成熟,也是目前唯一成功用于机载/船载动机座并进行商用的重力梯度测量系统,已经进行了大量的勘探工作,并取得了良好的效果[5-8]。20世纪90年代国内开始研究重力梯度仪[9],目前有的科研单位已经研制出了重力梯度仪实验室样机[10-12]。
旋转加速度计重力梯度仪是一种高精密测量仪器,在出厂前或使用前需要对其进行标定。目前,关于旋转加速度计重力梯度仪的标定方法在公开刊物上没有报道。
重力梯度仪标定一般是在实验室环境条件下进行,在重力梯度仪外侧放置形状规则的均质检测质量体,通过改变检测质量体与GGI圆盘中心的距离来改变GGI中心处的引力场,变化的引力场被重力梯度敏感器敏感到,然后对重力梯度仪的输出信号进行重力梯度解调,就可以获得距离与GGI测量梯度之间的对应关系,根据这种对应关系与重力梯度理论值进行对比,可以确定出重力梯度零位和标度系数,但由于引力梯度对距离敏感,检测质量体距GGI较近时会产生较大畸变,从而导致较大标定误差。为此,本文提出一种旋转加速度计重力梯度仪部分张量的高精度标定方法。
1 重力梯度标定方法
重力梯度仪主要有全张量和部分张量两种类型,针对全张量重力梯度仪需要对五个独立重力梯度元素进行标定,全张量重力梯度仪标定方法与部分张量重力梯度仪标定方法类似,本文只对部分张量重力梯度仪标定方法进行分析。对于部分张量重力梯度仪,需要确定重力梯度分量(Гyy-Гxx)和 Гxy的零位和标度系数,重力梯度仪误差模型方程为

式中:Γc为重力梯度仪实际测量值;K为重力梯度标度系数;Γt为检测质量体引起的理论重力梯度,即重力梯度精确值;G0为周围环境物体引起的重力梯度,Γ0为重力梯度仪仪器本身性能引起的重力梯度值,即为重力梯度零位,重力梯度零位主要由GGI动力学扰动、线路噪声窜扰等因素引起,不考虑时变影响,它是一个定值。从式(1)可以得到,G0和 Γ0相互耦合,不易提取出重力梯度零位,而G0主要与环境物体相对于GGI的位置有关,只要环境物体相对位置不改变,其值也不会改变。旋转重力梯度仪本体相当于环境物体相对于GGI位置的改变,若重力梯度仪本体旋转整数倍周期,那么G0将以周期性呈现,利用G0的周期性和Γ0的定值性,可以确定出重力梯度零位Γ0。
以GGI圆盘中心为原点O,以其所在平面为xy平面建立圆盘坐标系。假设检测质量体为均质长方体,其密度为ρ,检测质量体质心坐标为Q(W, D, H),检测质量体内任意一点坐标为P(x, y, z),检测质量体的长、宽、高分别设为w、d、h,如图1所示。

图1 检测质量体作用于重力梯度仪示意图Fig.1 Schematic for proof mass’s acting on GGI
根据万有引力定律,可得检测质量体对GGI圆盘中心的重力梯度分量计算表达式为:

式中:G为万有引力常数。从式(2)可以得到重力梯度与检测质量体的关系。为了便于说明检测质量体位置对重力梯度的影响,对式(2)变换为:

式中:θ为GGI圆盘中心到检测质量体质心矢量在圆盘平面上的投影与圆盘坐标系x轴正方向间的夹角,其中,

从式(3)可以看出,检测质量体相对于重力梯度仪旋转θ角,相当于重力梯度仪相对于检测质量体以反方向旋转θ角。设重力梯度仪本体旋转一周,旋转角度间隔为 10°,在每次旋转位置上测量一次重力梯度值,仿真结果如图2所示,从图2可以看出,通过旋转重力梯度仪本体,环境物体引起的重力梯度G0以周期性呈现,而重力梯度零位Γ0保持常值,采用这种方法可以分离出环境梯度 G0和重力梯度零位 Γ0,从而可得重力梯度零位Γ0的计算表达式为:

从式(3)可以进一步得到:当θ=0°, 90°, 180°, 360°时,即当检测质量体质心在x或y坐标轴上时,检测质量体引起的重力梯度分量 Гxy=0E;当θ=45°, 135°, 225°, 315°时,即当检测质量体质心在y=±x直线方程上时,检测质量体引起的重力梯度分量(Гyy-Гxx)=0E;当检测质量体质心在θ=0°, 90°位置上时,重力梯度分量(Гyy-Гxx)达到最大值,且两位置处的重力梯度分量(Гyy-Гxx)互为相反数,因此只要对两位置处的重力梯度分量(Гyy-Гxx)相减然后取均值,可以消除环境梯度以及由仪器本身引起的重力梯度零位。

图2 环境物体引起的重力梯度Fig.2 Gravity gradient caused by ambient object
同理,检测质量体质心在θ=45°, 135°位置上时,重力梯度分量 Гxy达到最大值,且两位置处的重力梯度分量Гxy互为相反数。
基于以上分析,给出重力梯度分量(Гyy-Гxx)和Гxy的标定方式:当对重力梯度分量(Гyy-Гxx)进行标定时,设定检测质量体质心在x和y坐标轴上;当对重力梯度分量Гxy进行标定时,设定质量体质心在y=±x直线关系上,且4个位置上的检测质量体质心到GGI圆盘中心的距离相等,检测质量体放置位置如图3所示。
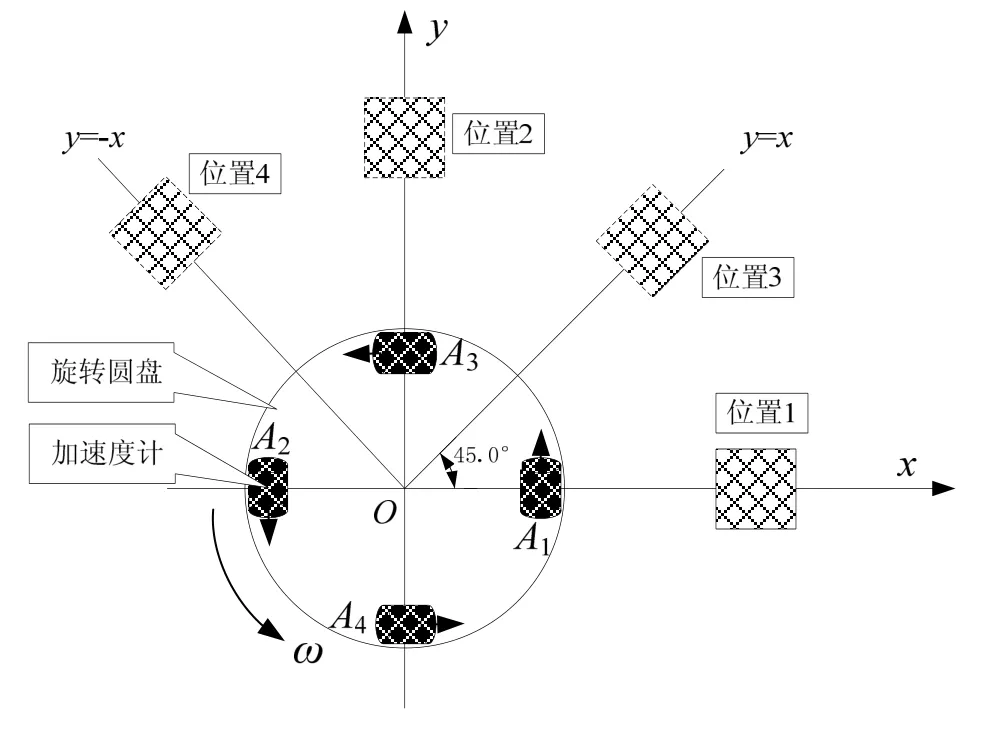
图3 检测质量体配置示意图Fig.3 Setting of proof mass bodies
检测质量体以图3所示位置配置方式进行放置,根据重力梯度分量计算式(3)可知,检测质量体在位置1与位置2处引起的重力梯度分量(Гyy-Гxx)大小相等,符号相反;同理,检测质量体在位置3与位置4处引起的重力梯度分量 Гxy大小相等,符号相反,根据上述关系给出4个位置检测质量体引起的重力梯度分量测量表达式为
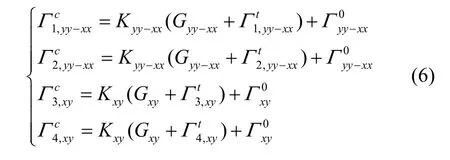
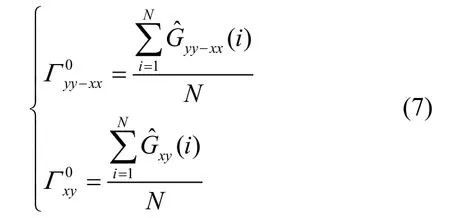
式中:Kyy-xx和Kxy分别表示重力梯度分量(Гyy-Гxx)和Гxy的标度系数,Gyy-xx和Gxy分别表示由环境物体引起的重力梯度分量分别表示检测质量体在位置1和位置2实际引起的理论重力梯度分量分别表示检测质量体在位置3和位置4实际引起的理论重力梯度分量Гxy,分别表示重力梯度分量零位。根据重力梯度零位计算表达式(5)可以得到重力梯度分量(Гyy-Гxx)和Гxy的零位计算表达式为
位置1与位置2处的重力梯度分量(Гyy-Гxx)测量值相减,消除环境物体和零位引起的重力梯度分量(Гyy-Гxx),得到如下关系式:


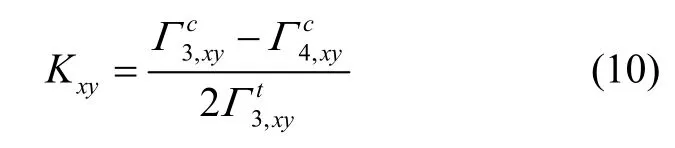
同理,位置3与位置4处的重力梯度分量Гxy测量值相减,消除环境物体和零位引起的重力梯度分量Гxy,得到重力梯度分量Гxy的标度系数计算表达式为
在进行重力梯度测量时,重力梯度仪真正测量的重力梯度信息是GGI周围环境物体引起的重力梯度异常,因此重力梯度分量计算表达式为
1)在没有检测质量体下,旋转重力梯度仪本体整数倍圈数,在相同旋转间隔位置处进行重力梯度解调,利用式(7)计算得到重力梯度零位Γ0;
2)在正交位置处依次放置检测质量体,然后对重力梯度仪输出信号进行重力梯度解调,利用式(9)和式(10)计算重力梯度标度系数K;
3)采用式(11)计算出重力梯度仪真正测量到的重力梯度分量(Гyy-Гxx)和Гxy。
2 半物理仿真实验与结果分析
采用上述给出的重力梯度分量零位和标度系数计算方法,在重力梯度仪半物理仿真分析系统上进行重力梯度标定仿真实验,仿真参数如下:加速度计标度因数为10 mA/g,加速度计对基线距离为0.2 m,检测质量体边长为0.3 m的均质正方体,密度为18 000 kg/m3,检测质量体质心到GGI圆盘中心的距离为1 m。根据重力梯度分量计算式(2)可以计算出检测质量体在位置 1处引起的重力梯度分量(Гyy-Гxx)理论值为-97.53E,在位置3处引起的重力梯度分量Гxy理论值为48.76E。为了模拟环境物体对重力梯度仪的影响,设环境物体边长为 1 m的均质正方体,密度为 2000 kg/m3,环境物体质心位置坐标为(2, 1, 0) m,此环境物体对GGI引起的重力梯度分量(Гyy-Гxx)和Гxy理论值分别为-21.63E和14.26E。加入2倍频干扰信号用于模拟重力梯度半物理仿真系统性能引起的重力梯度零位,重力梯度分量(Гyy-Гxx)和 Гxy的零位分别为 200E和10E;检测质量体依次被放置在图3所示的位置1、2、3、4上,然后分别对重力梯度仪仿真系统输出信号进行数据采集和重力梯度解调。设重力梯度仪本体旋转一周,旋转角度间隔为 20°,由环境物体引起的重力梯度分量输出信号如图4所示,从图4可以看出,重力梯度以近似正弦波形式呈现,这与理论分析结果一致。采用式(7)计算出半物理仿真系统重力梯度分量(Гyy-Гxx)和 Гxy的零位分别为190.93E和9.98E。检测质量体在不同位置处产生的重力梯度如表1所示,表1中上标t为重力梯度理论值,c为实际测量重力梯度值。根据表1中的重力梯度分量数据,采用式(9)和式(10)计算出重力梯度分量(Гyy-Гxx)和 Гxy的标度系数分别为0.9578和0.9565。重力梯度零位和标度系数是重力梯度测量系统固有特性,它只与重力梯度仪本身性能有关,与外界因素无关。
为了检验重力梯度零位和标度系数的正确性,假设检验质量体参数为:质量体为均质长方体,长、宽和高分别为0.2 m、0.5 m、0.4 m,密度为10 000 kg/m3,其质心坐标为(0.8, 0.4, 0) m,此检验质量体对GGI引起的重力梯度分量(Гyy-Гxx)和 Гxy理论值分别为-68.63E和 39.83E,标定前后重力梯度测量值如表 2所示,从表2的结果可以得到,重力梯度标定前,由于仪器性能等原因引起的重力梯度被引入到重力梯度信息中,从而造成重力梯度测量误差,通过对重力梯度标定,标定后重力梯度测量值与重量梯度理论值之间的误差小于1E,因此提高了重力梯度测量精度。

图4 半物理仿真系统环境梯度仿真结果Fig.4 Gravity gradient caused by ambient object on the Hardware-in-the-loop simulation platform

表1 不同位置处的检测质量体产生的重力梯度Tab.1 Gravity gradient caused by proof mass in different positions
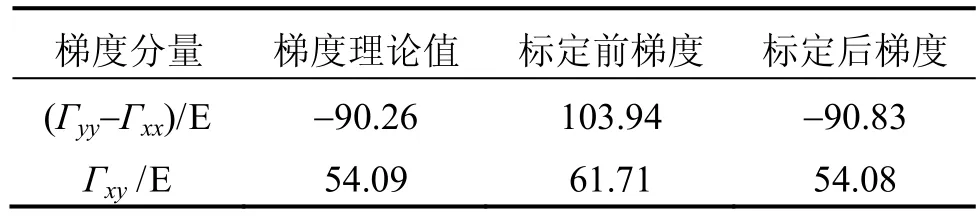
表2 标定前后重力梯度测量值Tab.2 Gravity gradiometry of GGI before and after calibration
3 结 论
本文从系统级角度提出了一种部分张量旋转加速度计重力梯度仪的标定方法,给出了重力梯度零位和标度系数的计算表达式以及标定步骤。通过重力梯度半物理仿真系统试验,仿真结果表明该方法能够实现重力梯度仪的标定。
(References):
[1] Dransfield M H, Christensen A N. Performance of airborne gravity gradiometers[J]. The Leading Edge, 2013, 32(8): 908-922.
[2] DiFrancesco D, Grierson A, Kaputa D, et al. Gravity gradiometer systems - advances and challenges[J]. Geophysical Prospecting, 2009, 57(4): 615-623.
[3] Welker T C, Pachter M, Huffman R E. Gravity gradiometer integrated inertial navigation[C]//2013 European Control Conference. Zurich, Switzerland, 2013: 846-851.
[4] Hodges G, Dransfield M H, Shei T C. The falcon airborne gravity gradiometer for engineering applications[C]//23rdSymposium on the Application of Geophysics to Engineering and Environmental Problems 2010. Keystone, USA, 2010: 443-447.
[5] Uzun S. Estimating parameters of subsurface structures from airborne gravity gradiometry data using a Monte-Carlo optimization method[R]. Geodetic Science, The Ohio State University, Columbus, Ohio, USA, 2013.
[6] Rummel R, Yi W, Stummer C. GOCE gravitational gradiometry[J]. Journal of Geodesy, 2011, 85(11): 777-790.
[7] Roberts D, Chowdhury P R, Lowe S J, et al. Airborne gravity gradiometer surveying of petroleum systems under Lake Tanganyika, Tanzania[C]//ASEG-PESA 2015. Perth, Australia, 2015: 1-5.
[8] Christensen A N, Galder C V, Dransfield M. Improved resolution of fixed-wing airborne gravity gradiometer surveys[C]//2014 SEG Annual Meeting. Denver, Colorado, USA, 2014: 1319-1323.
[9] 蔡体菁, 周百令. 重力梯度仪的现状和前景[J]. 中国惯性技术学报, 1999, 7(1): 39-42. Cai Ti-jing, Zhou Bai-ling. Status and prospects of gravity gradiometers[J]. Journal of Chinese Inertial Technology, 1999, 7(1): 39-42.
[10] 刘昱, 张宇, 潘军, 等. 重力梯度测量中光栅角编码器安装误差的影响及分析[J]. 中国惯性技术学报, 2015, 23(1): 6-8. Liu Yu, Zhang Yu, Pan Jun, et al. Influence and analysis of optical angular encoder’s installation error in gravity gradiometry[J]. Journal of Chinese Inertial Technology, 2015, 23(1): 6-8.
[11] 李海兵, 杨慧, 马存尊, 等. 用于重力梯度仪系统中的高精度微弱信号检测电路[J]. 中国惯性技术学报, 2013, 21(5): 581-584. Li Hai-bing, Yang Hui, Ma Cun-zun, et al. High precision and week signal detection circuits of gravity gradiometer system[J]. Journal of Chinese Inertial Technology, 2013, 21(5): 581-584.
[12] Tu L C, Wang Z W, Liu J Q, et al. Implementation of the scale factor balance on two pairs of quartz-flexure capacitive accelerometers by trimming bias voltage[J]. Review of Scientific Instruments, 2014, 85: 095108-1-7.
Calibration method for gravity gradiometer of rotating accelerometer
QIAN Xue-wu, CAI Ti-jing
(School of Instrument Science and Engineering, Southeast University, Nanjing 210096, China)
A calibration method for rotating accelerometer gravity gradiometer instrument (GGI) is presented. The proof mass bodies are sequentially placed at four positions outside the GGI. The gravity gradient scale coefficient is determined based on the relationship at perpendicular position of gravity gradient component, i.e. the gradients caused by proof masses at orthogonal positions are the same in magnitude and opposite in sign. The gravity gradient bias is determined by the method of rotating the GGI body. The calculation expression of gravity gradient bias and scale coefficient are deduced in details. A validation test of calibration method is performed on the Hardware-in-the-loop simulation platform. Simulation results show that the measurement error of the calibrated gravity gradient is less than 1E.
gravity gradiometer instrument; rotating accelerometer; proof mass; gradient calibration
U666.1
:A
2016-04-27;
:2016-07-08
国家863计划项目(2011AA060501)
钱学武(1981—),男,博士研究生,从事精密仪器研究。E-mail: njqxwu@163.com
联 系 人:蔡体菁(1961—),男,教授,博士生导师。E-mail: caitij@seu.edu.cn
1005-6734(2016)04-0427-04
10.13695/j.cnki.12-1222/o3.2016.04.002
猜你喜欢
科学与信息化(2021年12期)2021-12-27
炼油技术与工程(2021年4期)2021-05-03
四川大学学报(自然科学版)(2020年3期)2020-06-03
中国建材科技(2020年6期)2020-03-23
客车技术与研究(2019年5期)2019-10-24
中国惯性技术学报(2019年1期)2019-05-21
计算机应用与软件(2018年12期)2018-12-13
科技经济市场(2017年5期)2017-09-16
中国惯性技术学报(2017年1期)2017-06-09
探测与控制学报(2015年4期)2015-12-15
